

Лекція 5. Постановка і методи вирішення задач управління
Постановка задач управління в загальному вигляді залежить від характеру об’єкта управління, але методи вирішення цих задач істотно відрізняються.
В усіх випадках задача управління полягає в тому, щоб у будь-який момент часу забезпечити необхідний стан об’єкта управління. Цей стан визначається набором функціональних характеристик.
Розрізняють задачі управління: 1)у технічних системах; 2)в організаційно-економічних системах.
Технічні системи часто називають динамічними, маючи на увазі високу швидкість протікання перехідних процесів у них. Задача управління об’єктом у технічній системі може бути поставлена або як задача аналізу системи управління, або як задача синтезу.
При вирішені задач аналізу відома структура всієї системи і параметри об’єкта управління, що обумовлюються з призначення й умов експлуатації об’єкта. Задача розробки системи управління в цілому випадку зводиться до вирішення параметрів регулятора, що забезпечують задані статичні і динамічні показники системи управління.
Вихідними
даними для вирішення задач аналізу
системи управління є їхні математичні
методи, що складаються на основі
математичного опису елементів і системи
в цілому. Математичний опис динамічних
систем управління базується на
алгебраїчних і диференціальних рівняннях,
а також на різницевих рівняннях. Для
вирішення диференціальних рівнянь
динаміки САУ широко використовуються
перетворення Лапласа, що дозволяє
перейти від функцій часу
до
функцій комплексного змінного
![]() :
:
![]() ,
(1.11)
,
(1.11)
де p- комплексне число.
Функція у виразі (1.11) називається оригіналом, а - зображенням.
У
задачах аналізу лінійних систем
автоматичного управління перетворення
Лапласа здійснюється за нульових
початкових умов, тобто за умов, коли при
t=0 сама
функція
та
її похідні обертаються в нуль. У таких
випадках заміна оригіналів зображеннями
дозволяє перейти від диференціальних
рівнянь динаміки САУ до алгебраїчних
рівнянь. Дійсно, нехай маємо функцію
![]() .
.
Застосувавши до виразу (1.12) перетворення (1.11) при нульових початкових умовах, знайдемо
![]() (1.13)
(1.13)
Таким чином, при показаних умовах перехід від диференціальних рівнянь оригіналів до залежностей у формі зображень зводиться до того, що у вихідних диференціальних рівняннях динаміки САУ оригінали функцій замінюються їхніми зображеннями, а операції диференціювання – множенням на p. У результаті система диференціальних рівнянь замінюється системою алгебраїчних рівнянь, що вирішуються значно простіше. У результаті вирішення одержуємо зображення, від котрих можна знову перейти до оригіналів шляхом оберненого перетворення з використанням теорем операційного числення. Часто, проте, оберненого перетворення не потрібно, тому що в теорії управління розроблені ефективні методи визначення якості управління, що базуються на аналізі оператор них рівнянь – рівнянь у зображеннях. Частина цих методів розглядається далі.
Хоча описані постановки і методи вирішення задач аналізу САУ охоплюють лінійні системи, на базі цих методів у значній мірі базуються дослідження інших типів систем управління: нелінійних, дискретних, виробничо-економічних.
Задача синтезу систем управління полягає у визначенні її структури і параметрів по заданій меті управління. Звичайно синтез систем управління зводиться до синтезу регулятора, тому що структура і параметри об’єкта управління відомі або визначаються фахівцями відповідних областей на основі загального призначення проектованої системи.
Підвищення вимог до техніко-економічних показників систем управління призвело до створення оптимальних систем, під якими розуміються системи, що забезпечують найкраще в деякому змісті управління. Синтез систем управління також проводиться на підставі їхніх математичних моделей.
Виробничо-економічні й організаційні системи є складними системами. Постановка і вирішення задач управління в таких системах відрізняється більшою складністю, що випливає з їхнього математичного опису. Об’єкти і процеси в цих системах, як правило, не можуть бути достатньо повно описані математично. Багато з процесів, що протікають у складних системах, можуть бути оцінені не кількісно, а якісно, для чого використовується апарат булевих змінних.
Булеві змінні являють собою якісні параметри, що оцінюються по двобальній системі. Вони зручні для якісної оцінки типу ТАК і НІ , при цьому настання події оцінюється балом 1, а ненастанням – балом 0.
Функціональні залежності, що описують елементи складних систем, містять як неперервні, так і булеві змінні, наприклад:
![]()
де
x, y- неперервні
змінні,
![]() - булевий параметр.
- булевий параметр.
Аналітичні залежності x=f(y) задаються окремо для значення =0 і =1
Так само, як і в динамічних системах співвідношення між кількісними параметрами формалізуються у вигляді алгебраїчних, диференціальних, різницевих рівнянь, а співвідношення між якісними параметрами встановлюються у вигляді логічних співвідношень, у формі таблиць і т.д. При описі складних систем широко використовуються імовірнісні функції, системи ваг, що оцінюють ті або інші події, експертні оцінки.
Складність математичного опису виробничо-економічних і організаційних систем випливає насамперед із того, що це людино-машинні системи, що функціонують часто в умовах важко передбачуваних ситуацій. Процеси в таких системах дуже складно описати формалізовано.
Крім того, поведінка складної системи обумовлюється величезною кількістю змінних, обчислювальних сотнями тисяч. Звичайно ці величини мають різну фізичну природу, співвідношення між ними відрізняються винятковим розмаїттям. Змінні, що характеризують складну систему, знаходяться в тісній взаємодії і взаємозв’язку, характер яких такий, що зміна окремого зв’язку або параметру якогось елемента, що входить у систему, спричиняє за собою зміну всіх інших зв’язків та параметрів чи більшості з них. Будь-який новий елемент, що вводять в складну систему, змінює параметри та зв’язки багатьох чи всіх елементів системи.
Задача
управління складною системою зводиться
до того, щоб забезпечити такі функціональні
перетворення
![]() що
були б оптимальні по обраним критеріям
ефективності – деяким показникам, що
визначають ступінь досягнення цілі, що
стоїть перед керованою системою.
що
були б оптимальні по обраним критеріям
ефективності – деяким показникам, що
визначають ступінь досягнення цілі, що
стоїть перед керованою системою.
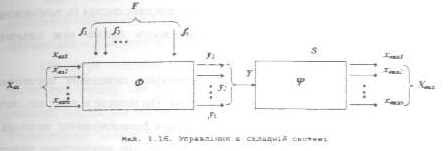
Нехай
маємо складну систему S
(мал. 1.16), що складається з двох частин
-
![]() та
та
![]() .
Частина
складної системи перетворює множину
керуючих (вхідних) впливів
.
Частина
складної системи перетворює множину
керуючих (вхідних) впливів
![]() та множену керуючих впливів
та множену керуючих впливів
![]() в змінні, що характеризують стан системи
(змінні стану) :
в змінні, що характеризують стан системи
(змінні стану) :
![]() .
Частина
перетворює змінні стану у вихідні
величини
.
.
Частина
перетворює змінні стану у вихідні
величини
.
Складність проблеми управління полягає у тому, що кожна зміна множини Y – множини координат станів системи – є функцією всіх впливів на систему:
![]()
![]()
а кожна змінна множини - множини керованих (вихідних) змінних – є функцією всіх змінних стану:
![]()
або
![]()
Задача управління складною системою зводиться до того, щоб забезпечити такі функціональні перетворення які були б оптимальними по обраним категоріям ефективності – деяким показникам, що визначають ступінь досягнення цілі, яка стоїть перед системою, якою управляють.
Для спрощення математичного опису складних систем їх розбивають на підсистеми за принципом ієрархії, встановлюють зв’язки між елементами кожного рівня і між окремими рівнями.
Характерною рисою проблеми управління складною системою є необхідність системного підходу до управління. Він полягає в тому, що система повинна розглядатися як єдине ціле з позиції цілі функціонування, загальної для всіх підсистем. Практично це призводить до того, що недопустима незалежна оптимізація функціонування окремих підсистем, що утворюють систему, тобто недопустимо вдосконалення окремих підсистем складної системи з позиції часткових цілей цих підсистем. Наприклад, у системі управління яким-небудь виробничим об’єктом неприпустимо вдосконалювання управління окремим підрозділом без врахування цілей, що стоять перед об’єктом у цілому. У противному випадку, наприклад, цех якогось підприємства істотно поліпшить свої показники, а робота підприємства в цілому може виявитися незадовільною.
Для ілюстрації
сказаного розглянемо деяку умовну
систему, що знаходиться під впливом
двох регулюючих впливів -
![]() ,
,![]() ,
що є аргументами функцій
,
що є аргументами функцій
![]() та f . нехай функція
відбиває прибутки в системі, а f
– втрати:
та f . нехай функція
відбиває прибутки в системі, а f
– втрати:
![]() .
В якості критерію ефективності такої
системи доцільно вибрати такий:
.
В якості критерію ефективності такої
системи доцільно вибрати такий:
![]() .
.
Припустимо, що одна підсистема максимізує по , а інша мінімізує втрати, тобто мінімізує f по :
![]() .
.
Очевидно,
що
![]() ,
тобто
,
тобто
![]() .
.
Таким чином, управління складною системою повинно здійснюватися як управління єдиною цілісною структурою, що має кінцеву ціль функціонування, загальну для всіх підсистем, що утворюють систему.
Структура складної системи управління визначається в результаті системного аналізу, що представляє собою сукупність прийомів дослідження складних систем, що об’єднує як формалізовані, так і неформалізовані методи. Формалізовані методи базуються на прикладних математичних дисциплінах, насамперед на методах математичного програмування. Неформалізовані методи спираються на експортні оцінки й апарат теорії корисності, що дозволяє впорядкувати критерії управління по їхній вазі в оцінці ступеня досягнення цілі управління. В якості технічної бази системного аналізу використовуються ЕОМ.
При
відомій структурі складної системи
ціль її функціонування описується
деякою скалярною функцією – цільовою
функцією W,
що досягає екстремального значення при
оптимальному (найкращому у визначеному
розумінні) регулювання. Аргументами
цільової функції є вихідні параметри
![]() ,м
що у реальній системі відбивають
ефективність її функціонування. Вихідні
параметри – аргументи цільової функції
– самі є функціями деяких величин
,м
що у реальній системі відбивають
ефективність її функціонування. Вихідні
параметри – аргументи цільової функції
– самі є функціями деяких величин
![]() ,
які в реальній системі є керованими
параметрами. Впливаючи на них, можна
забезпечити необхідні значення вихідних
параметрів.
,
які в реальній системі є керованими
параметрами. Впливаючи на них, можна
забезпечити необхідні значення вихідних
параметрів.
Умови
управління в складній системі залежать
також від некерованих параметрів
![]() .
.
У процесі функціонування складної системи на керовані, некеровані і вихідні параметри накладаються обмеження, що відбивають реальні умови роботи й існування системи. Обмеження в реальних системах можуть бути, наприклад, обмеження тих або інших ресурсів, термінів виробництва робіт, вартості, геометричні величини і т.д.
На підставі сказаного математична модель складної системи в загальному вигляді може бути подана так:
![]() ;
(1.14)
;
(1.14)
![]() ;
(1.15)
;
(1.15)
![]() (1.16)
(1.16)
Функція W , що виражає ціль управління, називається цільовою функцією. Беручи до уваги те, що її аргументи є функціями багатьох змінних, функцію W називають ще функціоналом. Залежність (1.16) виражає обмеження, що накладаються на параметри, обумовлені конкретними умовами функціонування складної системи.
У викладеній постановці
задача управління складною системою
полягає в тому, щоб забезпечити екстремум
цільової функції:
![]() .
При цьому в залежності від змісту
цільової функції задача управління
зводиться до забезпечення
.
При цьому в залежності від змісту
цільової функції задача управління
зводиться до забезпечення
![]() або
або
![]() .
Очевидно, що в першому випадку цільова
функція відбиває витрати в системі
(наприклад, мінімум собівартості
продукції, що випускається), а у другому
– прибуток, збільшення випуску продукції
і т.д. Вирішення поставленої задачі
забезпечується відповідним добором
значень керованих параметрів. Величезне
число керованих і вихідних параметрів,
складні залежності (1.14)-(1.16), що включають
істотні не лінійності, дискретність
деяких параметрів і інші частини роблять
вирішення задачі дуже складним.
.
Очевидно, що в першому випадку цільова
функція відбиває витрати в системі
(наприклад, мінімум собівартості
продукції, що випускається), а у другому
– прибуток, збільшення випуску продукції
і т.д. Вирішення поставленої задачі
забезпечується відповідним добором
значень керованих параметрів. Величезне
число керованих і вихідних параметрів,
складні залежності (1.14)-(1.16), що включають
істотні не лінійності, дискретність
деяких параметрів і інші частини роблять
вирішення задачі дуже складним.
Головними методами вирішення задач управління у викладеній постановці є методи математичного програмування. Математичне програмування являє собою розділ прикладної математики, що займається питанням визначення екстремумів функцій на деякій множені.
При вирішенні задач управління складними системами методи математичного програмування використовуються для визначення чисельних значень змінних, що характеризують виробничо-економічні процеси, які задовольняють деяким обмеженням у формі рівнянь або нерівностей і забезпечують екстремум заданої цільової функції, що відбиває ефективність управління. В залежності від типу цільової функції й обмежень використовуються різноманітні типи математичного програмування – лінійне, динамічне, опукле, геометричне тощо. Особливості цих методів і областей їх застосування розглянуті нижче.
Задача управління складними системами істотно ускладнюється впливом різноманітних випадкових чинників, наприклад виходом із ладу устаткування, погодними умовами, порушенням постачань сировини або комплектуючих виробів і т.п. У таких випадках управління повинно здійснюватися в умовах неповної інформації про об’єкт управління. Ці задачі вирішуються методами стохастичного програмування. Широко використовуються різноманітні евристичні методи.