

На схемі (рис. 1.5) поданні види управління і типи систем, що регулюють відповідні види управління. Слід відмітити, що автоматичне і автоматизоване
управління базується на загальних принципах і методах. Поте автоматизоване управління здійснюється в складних (великих) системах, елементи яких значно складніше описувати формалізовано, ніж елементи автоматичних систем. Більш того, об’єкти і процеси складних систем найчастіше взагалі не можуть бути описанні математично. Це почало вимагати більш глибокої розробки методів і засобів управління. що реалізуються автоматизованими системами, а також створення ряду специфічних методів аналізу і синтезу складних систем управління.
Лекція 2. Приклади елементів і систем управління.
Обираючи в якості прикладів
ті або інші елементи і системи управління,
будемо виходити з того, наскільки добре
обрані приклади дозволяють ілюструвати
головні визначення і поняття теорії
управління. З цих позицій найбільш
зручними є різноманітні електромеханічні
пристрої і системи, що, не вимагаючи
спеціальних технічних знань, дозволяють
добре простежити процеси управління,
його принципи і закони, режими роботи
систем управління. У якості першого
простого приклада об’єкта
управління візьмемо генератор постійного
струму незалежного збудження (мал. 1.6),
принцип дії якого добре відомий з курсу
фізики середньої школи. Нехай потрібно
управляти (регулювати) напругою (ЕРС)
генератора u,
тобто
![]() .
Як відомо, напруга генератора залежить
від частоти обертання його вала
.
Як відомо, напруга генератора залежить
від частоти обертання його вала
![]() , як правило, не застосовується по
техніко-економічним розумінням, але
регулювання напруги зміною струму
збудження застосовується широко,
являючись в більшості випадків єдиним
способом. Отже,
, як правило, не застосовується по
техніко-економічним розумінням, але
регулювання напруги зміною струму
збудження застосовується широко,
являючись в більшості випадків єдиним
способом. Отже,
![]() .
Як інший приклад об’єкта
управління візьмемо електродвигун
постійного струму незалежного збудження
(мал. 1.6,б). Нехай потрібно управляти
частотою обертання
вала двигуна. Не зупиняючись на всіх
можливих засобах регулювання частоти
обертання вала електродвигуна, відзначимо
один з них – регулювання частоти
обертання шляхом зміни напруг, що
підводиться до якоря, тобто величини
u.
Отже, в даному випадку маємо
.
Як інший приклад об’єкта
управління візьмемо електродвигун
постійного струму незалежного збудження
(мал. 1.6,б). Нехай потрібно управляти
частотою обертання
вала двигуна. Не зупиняючись на всіх
можливих засобах регулювання частоти
обертання вала електродвигуна, відзначимо
один з них – регулювання частоти
обертання шляхом зміни напруг, що
підводиться до якоря, тобто величини
u.
Отже, в даному випадку маємо
![]()

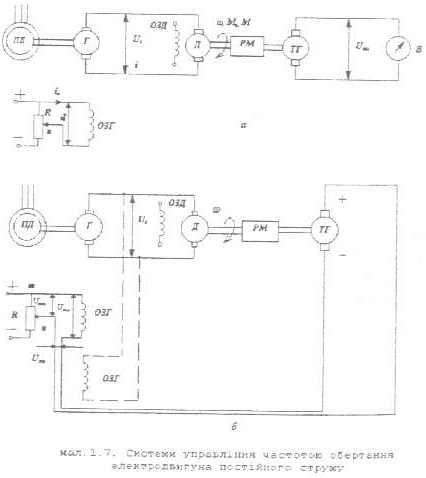
Як приклад системи розглянемо електромашинну схему управління частоти обертання двигуна постійного струму (мал. 1.7). попередньо розглянемо процеси управління по розімкненому циклу (мал. 1.7,а).
Об’єктом
управління в схемі є електродвигун
постійного струму Д з обмоткою незалежного
збудження двигуна ОЗД. Електродвигун
призводить до обертання валу робочої
машини РМ, яка здійснює визначену робочу
операцію, наприклад, переміщення
будівельного крану, робочого органу
землерийної машини і т. п. З валом
електродвигуна жорстко пов’язаний
тахогенератор ТГ. Напруга тахогенератора
![]() ,
пропорційна частоті обертання
електродвигуна, вимірюється вольтметром,
відградуйованим в одиницях частоти
обертання
.
Електродвигун Д підключений до генератора
постійного струму Г,
обертаємому приводним двигуном ПД.
Обмотка збудження генератора ОЗГ
через потенціометр R
включена на джерело постійної напруги.
Переміщуючи повзунок n
реостата та регулюючи частоту обертання
валу двигуна Д
по показникам вимірювача В,
можна управляти частотою обертання
по заданому закону.
,
пропорційна частоті обертання
електродвигуна, вимірюється вольтметром,
відградуйованим в одиницях частоти
обертання
.
Електродвигун Д підключений до генератора
постійного струму Г,
обертаємому приводним двигуном ПД.
Обмотка збудження генератора ОЗГ
через потенціометр R
включена на джерело постійної напруги.
Переміщуючи повзунок n
реостата та регулюючи частоту обертання
валу двигуна Д
по показникам вимірювача В,
можна управляти частотою обертання
по заданому закону.
Очевидно, що для управління частотою обертання електродвигуна в аналізованій системі необхідна участь оператора, тобто тут має місце ручне управління. Тому що в розглянутій системі зміна вихідної величини безпосередньо (без участі оператора) не перетвориться в регулюючий вплив на вході системи, то автоматичне управління в ній не можливо. В тому самому становищі регулюючого органа (повзунка n), але при різних значеннях збуджуючих впливів на об’єкт управління будуть різними значення керованої (регульованої) величини – у даному випадку частоти обертання вала двигуна Д.
Перетворимо розімкнену систему управління (мал. 1.7,а) в замкнуту (мал. 1.7,б). З цією метою напругу з виходу тахогенератора подамо на вхід
системи управління, забезпечивши виконання умови
![]()
де
![]() -
напруга на обмотці збудження генератора;
-
напруга на обмотці збудження генератора;
![]() -напруга,
що знімається з потенціометра.
-напруга,
що знімається з потенціометра.
У перетвореній таким чином системі зміни регульованої частоти – частоти обертання валу електродвигуна – автоматично передаються на вхід і разом з напругою, що задається, формують регулюючий вплив . Виконання умови (1.3) забезпечує утворення в системі головного від’ємного зворотного зв’язку і можливість автоматичного регулювання вихідної величини – частоти обертання .
Дійсно,
при збільшенні навантаження на валі
електродвигуна частота обертання його
зменшується. Це викликає зменшення
напруги тахогенератора
![]() і збільшення напруги
призведе до зростання напруги
і збільшення напруги
призведе до зростання напруги
![]() генератора, який підводиться до якоря
електродвигуна, що призведе до відновлення
значення частоти обертання вала
електродвигуна.
генератора, який підводиться до якоря
електродвигуна, що призведе до відновлення
значення частоти обертання вала
електродвигуна.
Міркуючи аналогічно, можна переконатися в тому, що збільшення частоти обертання, викликане зменшенням навантаження на вал двигуна, також спричинить її автоматичне відновлення до вихідного значення. Отже, процес стабілізації частоти обертання здійснюється автоматично, без участі оператора.
У аналізованій схемі зворотній зв’язок утворений електричним з’єднанням тахогенератора з потенціометром та обмоткою збудження генератора. Використовуючи визначення, поняття і термінологію, введенні в попередньому параграфі, за аналогією з мал. 1.2,б, у замкнутій системі (мал. 1.7,б) маємо:
![]() -
вплив, що задає;
-
вплив, що задає;
![]() -
сигнал зворотного зв’язку;
-
сигнал зворотного зв’язку;
![]() -регулюючий
вплив, що прикладається
до регулятора;
-регулюючий
вплив, що прикладається
до регулятора;
![]() -
регулюючий вплив, що прикладається до
об’єкта управління;
-
регулюючий вплив, що прикладається до
об’єкта управління;
![]() -
вихідна, або регульована (керована),
величина.
-
вихідна, або регульована (керована),
величина.
Головною складовою збуджуючого впливу на замкнуту систему є навантаження на валі робочої машини, пов’язаної з валом електродвигуна. Проте інші складові збурення, що виводять систему з даного стану, можуть бути прикладені в будь-якій точці системи, до будь-якого її елемента. Наприклад, складовими збудженнями можуть бути зміни: напруги в мережі, що живить приводний двигун; опри під щітками генератора й електродвигуна; опори електричних ланцюгів, що входять в систему, викликані зміною температурного режиму, і т.п. Система автоматичного управління повинна бути організована так, щоб компенсувати вплив будь-якого збурення і забезпечити заданий режим роботи об’єкта управління.
На мал. 1.7,б штрихованою лінією показаний місцевий зворотній зв’язок, утворений за допомогою другої обмотки збудження ОЗГ, підключеної на вихід генератора. Місцевий зворотній зв’язок, як відзначалося в попередньому параграфі, може бути як додатнім, так і від’ємним. У аналізованій системі при додатному місцевому зворотному зв’язку магнітні потоки обох ОЗГ додаються, при від’ємному віднімаються, що обумовлюється зміною полярності ОЗГ, що утворить зворотній зв’язок. Знак місцевого зворотного зв’язку визначається за умовами динамічного розрахунку системи, про що мова йтиме нижче.
За характером дії свого вихідного сигналу (вихідної величини) місцеві зворотні зв’язки підрозділяються на жорсткі і гнучкі. Жорсткий зворотній зв’язок характерний тим, що сигнал на його виході існує як у сталому режимі, тобто в статиці, так і в перехідному, тобто в динаміці. Дія жорсткого зворотного зв’язку у системі виявляється незалежно від того, який сигнал є у неї на виході-постійний або змінний. Гнучкий зворотній зв’язок виявляється тільки в перехідному режимі, тобто в динаміці. Очевидно, що зворотній зв’язок у схемі на мал. 1.7,б є жорстким. Гнучким його можна зробити, підключивши другу обмотку збудження генератора на вихідну напругу генератора через ємність або трансформатор, що забезпечить передачу змін вхідного сигналу місцевого зворотного зв’язку на вихід цього зв’язку лише в перехідних режимах.
Варто підкреслити, що головний зворотній зв’язк може бути тільки жорстким, у противному випадку процес управління вихідної величини в статиці припиниться, навіть, якщо ця величина значно перевищує задану.
Виходячи зі сказаного, схему на мал. 1.7,б можна визначити як систему автоматичного регулювання частоти обертання двигуна постійного струму з головним зворотнім зв’язком по частоті обертання і місцевим жорстким зворотнім зв’язком по напрузі генератора, що живить електродвигун (або по напрузі, що підводиться до двигуна). Всі елементи, що входять у систему, крім
робочої машини й електродвигуна Д, утворюють регулятор.
Застосовуючи до розглянутої системи назви елементів, введені при визначенні функціональної схеми САУ (мал. 1.3), відзначимо, що функції управляючого (що задає) елемента тут виконує потенціометр, а генератор об’єднує в собі функції елемента порівняння, підсилювального і виконавчого елементів; функції паралельного коригуючого пристрою виконує обмотка збудження генератора, підключена на вихідну напругу генератора, а головний зворотній зв’язок утворений ланцюгом тахогенератора та ОЗГ, включений на потенціометр.
Система управління на мал. 1,7, б приведена в якості простого і наглядного приклада технічної системи автоматичного управління, на якій зручно проілюструвати ряд понять теорії управління, таких як об’єкт управління, управляючі і регулюючі впливи, типи зворотних зв’язків, реалізація функцій управління за допомогою конкретних фізичних пристроїв і т.д. Водночас, ця система широко застосовується в різноманітних галузях техніки, наприклад для управління електроприводом будівельних машин – екскаватори, крани і т.п. – в усіх випадках, коли потрібне широке і плавне управління частотою обертання валу робочого механізму. Система також знаходить широке застосування при управлінні транспортними механізмами. Вона дозволяє при наявності нерегульованого (або погано регульованого) і нереверсивного приводного двигуна ПД забезпечити широке, плавне і реверсивне управління робочої машини. Очевидні похибки системи – низький коефіцієнт корисної дії через кількаразове перетворення енергії в елементах системи, потреба в додаткових машинах (приводний двигун, генератор) призвели до того, що галузь використання розглянутої САУ значно звузилася. Проте ця система грає визначну роль у техніці управління різноманітними механізмами.
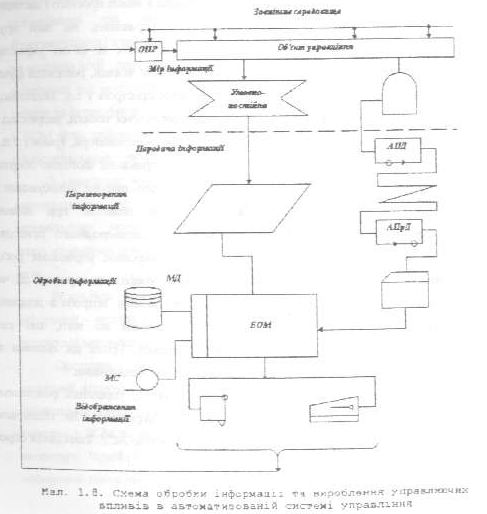
Технологію управління при автоматизованому управлінні розглянемо в загальному вигляді, не конкретизуючи об’єкт управління. Як відзначалося, автоматизоване управління реалізується за допомогою АСУ. Технологія обробки інформації і вироблення управляючих впливів в АСУ носить дуже типовий характер. Схема її подана на мал. 1.8.
Інформацію про об’єкт управління в АСУ можна розділити на види: умовно-постійну й оперативну.
Умовно-постійна інформація утримується в документах, що характеризують стан об’єкта у визначені періоди часу (виробничі потужності підприємства, технічні характеристики обладнання і т.п.). ця інформація необхідна для упорядкування машинної моделі об’єкта, для чого документи перетворюються у форму, зручну для запровадження в ЕОМ. У процесі підготування для запровадження в ЕОМ документи реєструються, комплектуються і з використанням систем класифікації і кодування переносяться на машинні носії – перфокарти, перфострічки, магнітні стрічки, магнітні карти. У залежності від масштабів і призначення об’єкта, потужності обчислювального центру та інших факторів підготовка умовно-постійної інформації для реалізації в ЕОМ може здійснюватися або безпосередньо на об’єкті, або в інформаційно-обчислювальному центрі.
З машинних носіїв інформація вводиться в ЕОМ і опрацьовується з використанням різноманітних програм нормативно-довідкових даних, математичних моделей об’єктів і процесів, збережених у зовнішніх запам’ятовуючих пристроях ЕОМ – магнітних стрічках МС, магнітних дисках МД та ін.
Результати опрацювання інформації виводяться на пристрої відображення інформації – екранні пульти ЕП, алфавітно-цифрові друкуючі пристрої АЦДП, друкарські машинки ДМ.
Оперативна інформація характеризує показники функціонування в поточний момент часу (поточний стан ресурсів обсяг випуску продукції, споживання енергії і т.п.). ця інформація перетворюється у форму, зручну для передачі в ЕОМ по каналах зв’язку, що містять апаратуру передачі даних АПД і апаратуру прийому даних АПрД. Результати опрацювання оперативної інформації також виводяться на засоби відображення.
Аналізуючи результати опрацювання інформації, ОПР – особа, що приймає рішення, формує управляючі впливи на об’єкт управління, якими можуть бути ті або інші адміністративні розпорядження, постачання додаткових ресурсів, вказівки та ін.
Розглянута схема опрацювання інформації і виробки регулюючих вирішень є типовою для більшості АСУ, незалежно від характеру об’єкта. При цьому в автоматизованих системах управління технологічними процесами (АСУТП) для збору оперативної інформації використовуються датчики, що контролюють стан обладнання.
З приведеного опису очевидно, що для будь-якої АСУ характерні такі етапи опрацювання інформації про об’єкт управління: збір, контроль і реєстрація, переклад інформації на машинні носії, запровадження інформації в ЕОМ, опрацювання на ЕОМ, виведення результатів опрацювання інформації на пристрої відображення і схови.