

Лекція 3. Принципи і закони управління (регулювання)
Техніко-економічні показники систем управління істотно залежать від принципів і законів управління (регулювання), реалізованих тією або іншою системою.
Принцип управління можна розглядати як спосіб формування регулюючого впливу, а закон управління – як математичний вираз принципу. Зупинимося докладніше на цих поняттях, тому що вони є в фундаментальному в теорії управління.
Системи управління формуються на основі одного з трьох принципів: 1) управління по відхиленню керованої величини; 2) управління по збуренню; 3) комбіноване управління.
У системах управління по відхиленню відхилення керованої величини від заданого значення перетвориться у регулюючий вплив. Це перетворення здійснюється регулятором, передається на об’єкт управління і спрямовано на зменшення відхилення керованої величини від заданого значення. Такий принцип управління відомий також за назвою принципу Палзунова – Уатта.
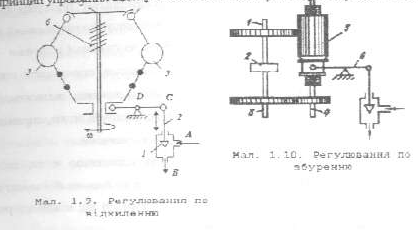
Спосіб реалізації принципу регулювання по відхиленню роздивимося на прикладі центр обіжного регулювання частоти обертання вала робочої машини РМ (мал. 1.9), широко застосованого в системах управління сучасними механізмами. Клапан 1, що регулює подачу палива з клапану А до двигуна (канал В), пов’язаний через тягу 2, важіль Д і систему шарнірних з’єднань із важелями 3 .
Валик 5 пов’язаний із валом робочої машини РМ, обертання якого через шарнірну передачу 4 передається системі важелів 3. пружина 6 відіграє роль дошкульного елемента регулятора. При заданій частоті обертання вала робочої машини система відрегульована так, щоб становище клапана 1 забезпечувало необхідну подачу палива до двигуна. Якщо частота обертання перевищить задану, то під впливом центробіжної сили важелів 3 розходиться, кінець важеля D піднімається, а кінець С-опускається. Клапан 1 займе нове становище, при якому подача палива до двигуна зменшиться і частота обертання вала РМ прийме знову задане значення. Міркуючи аналогічно, можна переконатися в тому, що при зменшені частоти обертання , у порівнянні з даною, клапан переміститься в напрямку, що забезпечує збільшення подачі палива до двигуна і відновлення частоти обертання.
Неважко переконатися в тому, що система регулювання швидкості обертання електродвигуна, розглянута в попередньому параграфі (див. мал. 1.7,б), є системою регулювання за принципом відхилення регульованої величини від заданого значення. У цій системі значення регульованої величини – частоти обертання вала робочої машини РМ – задається становищем повзунка n потенціометра R. При відхилені від заданого значення змінюється напруга тахогенератора , і в системі формується регулюючий вплив, спрямований на приведення регульованої величини до заданого значення.
Достоїнством системи регулювання по відхиленню є те, що в них забезпечується врахування всіх збурень, що діють на будь-який елемент системи, тому що регулюючий вплив формується в залежності від кінцевого результату управління – значення регульованої величини.
Недоліком регулювання по відхиленню є зниження швидкості системи, що виражається в уповільненні реакції регулятора на зміну регульованої величини. Дійсно, при регулюванні по відхиленню регульованої величини компенсація впливу будь-якого збурення, незалежно від місця його додатку в системі, починається лише після того, як цей вплив перетворився елементами системи в зміну регульованої величини.
Відзначений недолік усувається в системах управління за принципом компенсації збурення-управління по збуренню.
При управлінні по збуренню в системі вимірюється збуджуючий вплив (навантаження) і результат виміру перетвориться в регулюючий вплив. Реалізацію принципу регулювання по збуренню роздивимося на прикладі кінематичної схеми регулятора, поданого на мал. 1.10. У цій схемі вал двигуна 1 і вал робочої машини 3 пов’язані між собою пружним елементом 2. Обертання валів 1 і 3 передається валу 4, верхня частина якого має черв’ячну передачу. Муфта 5 поряд з обертальним рухом може здійснювати зворотно-поступальний рух уздовж лінії вала 4, що за допомогою важеля 6 передається в пристрій регулювання подачі палива, описаного вище (див. мал. 1.9). З мал. 1.10 очевидно, що при зміні навантаження на валі РМ відбувається відносний зсув перетинів валів 1 і 3, зсув муфти 5 у здовж лінії вала 4 і відповідна зміна подачі енергії до двигуна: при зниженні навантаження подача енергії зменшиться, а при підвищенні – збільшиться.
Складність виміру збурення (навантаження) – один із недоліків систем регулювання по збуренню. Проте в ряді технічних пристроїв часто буває неважко виділяти і використовувати з метою регулювання деяку фізичну величину, пов’язану визначеним законом (наприклад, пропорційну) з збуренням. Прикладом таких пристроїв служить генератор постійного струму зі змішаним збудженням, у якого послідовна (струмова) обмотка може використана для формування регулюючого впливу, залежного від навантаження – струму якоря генератора.
Достоїнством систем регулювання по збуренню є їх більш висока швидкість, тому що система реагує на зміну збурення до того, ці зміни елементами системи перетворяться в зміни регульованої величини.
Істотним недоліком регулювання по збуренню є нечутливість системи до всіх збурень, крім того, на який настроєний регулятор. У зв’язку з цим в практиці управління широко використовується принцип комбінованого управління, коли для формування регулюючого впливу використовуються як зміни збурення, так і зміни регульованої величини. Прикладом системи комбінованого управління може служити розглянута вище схема (мал. 1.7,б), якщо за допомогою другої обмотки збудження генератора здійснити зв’язок по струму в ланцюгу двигуна, тому що струм двигуна пов’язаний з навантаженням на валу робочої машини.
Описана вище (див. мал. 1.4) автоматизована система управління є системою комбінованого управління, тому що в ній використовується принцип регулювання по відхиленню регульованих величин на основі аналізу інформації про об’єкт управління і принцип регулювання по збуренню на основі аналізу інформації про стан середовища.
Кожний із трьох описаних принципів управління може бути реалізований по різноманітних законах. Законом управління назвемо функціональний зв’язок між впливом. У регулятора на регулюючий орган і значеннями величин, що визначають принцип управління.
Позначимо відхилення керованої
величини від заданого значення через
![]() ,
а навантаження – через q.
Тоді в найбільш загальному вигляді
закони управління виражаються так:
,
а навантаження – через q.
Тоді в найбільш загальному вигляді
закони управління виражаються так:
![]() (1.4)
(1.4)
Вибір
того чи іншого закону управління
проводиться на основі аналізу динамічних
режимів системи управління, а реалізується
обраний закон за допомогою технічних
засобів, що вводяться в систему в якості
коригуючих пристроїв. Прикладом таких
пристроїв є пасивні RC-
і RL-контури,
трансформатори, що стабілізують та ін.
Дійсно, якщо на первинну обмотку
трансформатора, що стабілізує, подати
електричну напругу
![]() ,
пропорційно корегуючому сигналу
управління, то при визначеному наборі
параметрів первинного і вторинного
ланцюгів на вході трансформатора (на
виході вторинної обмотки) виникає
напруга
,
пропорційно корегуючому сигналу
управління, то при визначеному наборі
параметрів первинного і вторинного
ланцюгів на вході трансформатора (на
виході вторинної обмотки) виникає
напруга
![]() ,
пропорційна першій похідній первинної
напруги:
,
пропорційна першій похідній первинної
напруги:
![]() .
.
Таким
чином, якщо
![]() ;
;
![]() ,
то одержимо
,
то одержимо
![]() ;
реалізуючи один із законів управління,
що міститься у виразі (1.4), а саме:
управління по першій похідній від
відхилення керованої величини.
;
реалізуючи один із законів управління,
що міститься у виразі (1.4), а саме:
управління по першій похідній від
відхилення керованої величини.
Зазначимо деякі найпростіші закони управління, що випливають із виразу (1.4):
закон управління, пропорційний відхиленню (управління по відхиленню керованої величини від заданого значення):
 ;
;пропорційний відхиленню з впливом по першій похідній від відхилення:
 ;
;пропорційний відхиленню з впливом по першій і другій похідним від відхилення:
 ;
;інтегральний по відхиленню:
 ;
;пропорційний відхиленню керованої величини з впливом інтеграла по навантаженню:
 ;
;пропорційний навантаженню:
 .
.
Кількість законів управління із нескінченої множини законів, що визначенні виразом (1.4), обмежені властивостями технічних і організаційно технічних засобів, що реалізують той чи інший закон. Реальний технічний засіб зазвичай не дозволяє реалізувати обраний закон управління (наприклад, ввести первинну похідну від величини, що корегується) у чистому вигляді без генерації пошкоджень. При цьому кількість пошкоджень і складність їх усунення зростають з ускладненням законів управління.
Зупинимося докладніше на двох законах управління, що найчастіше зустрічаються в технічних системах поряд із пропорційними законами управління по відхиленню керованої величини від заданого значення і по збуренню (навантаженню). Це закони управління з веденням похідних і інтегралів по відхиленню керованої величини і по навантаженню.
При управлінні по відхиленню до об’єкта управління підводиться регулюючий вплив, пропорційний відхиленню, тобто
(1.5)
де
![]() -
коефіцієнт пропорційності між відхиленням
та регулюючим впливом.
-
коефіцієнт пропорційності між відхиленням
та регулюючим впливом.
Вводячи в закон (1.5) похідну по відхиленню керованої величини, отримаємо
![]() (1.6)
(1.6)
де
![]() -
відповідні коефіцієнти пропорційності.
-
відповідні коефіцієнти пропорційності.
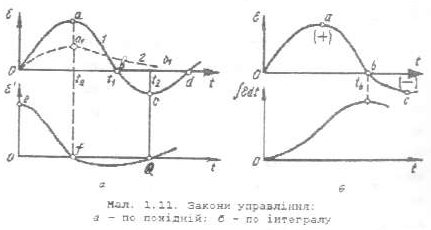
Управління за законом (1.6) надає системі управління інші динамічні властивості, ніж управління за законом (1.5). Дійсно, нехай відхилення керованої величини від заданого значення відбувається по кривій (мал. 1.11,а). Задача системи управління полягає в тому, щоб як можна швидше компенсувати відхилення або звести його до припустимого значення, визначеного вимогами до процесу управління.
При
управління за законом (1.5) величина
![]() передається на вхід системи через
головний зворотній зв’язок із від’ємним
знаком, здійснюючи регулюючий вплив,
спрямований на зменшення відхилення.
Регулюючий вплив у цьому випадку
пропорційний ординаті кривої 1
у кожний момент часу. Оскільки зворотній
зв’язок від’ємний, то
на проміжку
передається на вхід системи через
головний зворотній зв’язок із від’ємним
знаком, здійснюючи регулюючий вплив,
спрямований на зменшення відхилення.
Регулюючий вплив у цьому випадку
пропорційний ординаті кривої 1
у кожний момент часу. Оскільки зворотній
зв’язок від’ємний, то
на проміжку
![]() ,
тобто протягом часу, коли
,
тобто протягом часу, коли
![]() ,
регулюючий вплив спрямований на зменшення
відхилення. В силу інерційності елементів
системи характер регулюючого впливу
збережеться якийсь час при
,
регулюючий вплив спрямований на зменшення
відхилення. В силу інерційності елементів
системи характер регулюючого впливу
збережеться якийсь час при
![]() , хоча знак
вже змінився. Це викликає зростання
відхилення у зворотній бік, що припиниться
і деякий момент часу
, хоча знак
вже змінився. Це викликає зростання
відхилення у зворотній бік, що припиниться
і деякий момент часу
![]() .
На ділянці cd
при
.
На ділянці cd
при
![]() регулятор
буде діяти у бік зменшення
і т.д. Як очевидно, регулятор запізнюється
у своїй реакції на зміну відхилення, що
призводить до коливань керованої
величини і до збільшення часу її
стабілізації.
регулятор
буде діяти у бік зменшення
і т.д. Як очевидно, регулятор запізнюється
у своїй реакції на зміну відхилення, що
призводить до коливань керованої
величини і до збільшення часу її
стабілізації.
Показники
процесу управління істотно поліпшуються
при переході до регулювання за законом
(1.6). Дійсно, у цьому випадку на ділянці
Оа
кривої 1,
вплив регулятора, спрямований на
зменшення відхилення, зростає, тому що
до регулюючої складової, ніж раніше,
стримує наростання відхилення. На
ділянці abc
кривої 1
знак складової управління, пропорційної
збігається, а знак складового управління,
пропорційної
![]() ,
змінився на обернений, тому що в точці
а,
змінився знак похідної функції
,
змінився на обернений, тому що в точці
а,
змінився знак похідної функції
![]() .
.
Таким чином, складова, пропорційна похідній від відхилення, формує дію регулятора, спрямовану на зменшення відхилення доти, доки вона зростає, і підтримує значення відхилення в період його зменшення. Це скорочує час регулювання, запобігає коливанню вихідної величини.
Складова, пропорційна похідній, виявляється тим ефективніше, чим швидше наростає відхилення. При цьому ще до того, як відхилення накопичиться, створюється ефективний вплив для його зменшення, тому що регулюючий ефект, що забезпечується цією складовою, залежить не від величини відхилення, а від швидкості його наростання.
Варто підкреслити, що регулювання тільки по похідній без складової, пропорційної відхиленню, неможливо, тому що в цьому випадку процес управління буде виявлятися тільки в динаміці, припиняючись у статичних режимах. Корекція тільки по похідній може здійснюватися за допомогою місцевого зворотного зв’язку, а головний зворотний зв’язок повинен містити складову, пропорційну відхиленню.
При введені складової управління, пропорційної інтегралу по відхиленню, маємо:
![]() (1.7)
(1.7)
Друга
складова, пропорційна інтегралу, наростає
увесь час, поки відхилення додатне (мал.
1.11,б). Отже, на ділянці
![]() регулюючий вплив регулятора збільшується
навіть при незначному значенні відхилення
в кожний момент часу. Це підвищує точність
систем управління. У той же час регулювання
по інтегралу сприяє розвитку в системі
коливальних процесів. Дійсно, при
регулюючий вплив регулятора збільшується
навіть при незначному значенні відхилення
в кожний момент часу. Це підвищує точність
систем управління. У той же час регулювання
по інтегралу сприяє розвитку в системі
коливальних процесів. Дійсно, при
![]() коли
відхилення змінює свій знак, складова,
пропорційна інтегралу, висловлюючись
сумарною (з урахуванням знака) площею
під кривою
,
починає зменшуватися, але за законом
не змінюється. Знак цієї складової
зміниться лише тоді, коли площа, обмежена
нижньою гілкою кривої
,
перевищить площу, обмежену верхньою її
гілкою. До цього моменту, починаючи з
моменту
,
регулятор буде сприяти збільшенню
від’ємного відхилення.
Продовжуючи міркування, можна зауважити,
що складова управління, пропорційна
інтегралу від відхилення, надає системі
коливальність.
коли
відхилення змінює свій знак, складова,
пропорційна інтегралу, висловлюючись
сумарною (з урахуванням знака) площею
під кривою
,
починає зменшуватися, але за законом
не змінюється. Знак цієї складової
зміниться лише тоді, коли площа, обмежена
нижньою гілкою кривої
,
перевищить площу, обмежену верхньою її
гілкою. До цього моменту, починаючи з
моменту
,
регулятор буде сприяти збільшенню
від’ємного відхилення.
Продовжуючи міркування, можна зауважити,
що складова управління, пропорційна
інтегралу від відхилення, надає системі
коливальність.
Очевидно, що при використанні закону регулювання по інтегралу можна створювати системи управління, у яких відхилення регульованих величин від заданих зводиться до нуля. Таке управління, тобто управління без відхилення регульованої величини від заданого значення (або управління без похибки), називається астатичним. Управління ж, за якого в сталих режимах роботи системи збігається відхилення керованої величини від заданого значення, називається статичним.
У системі автоматичного регулювання, поданої на мал. 1.7,б, процес регулювання статичний, а сама система – статична система автоматичного регулювання. Відхилення в такій системі неминуче, тому що воно забезпечує регулюючий ефект у ній. Щоб перетворити цю систему в астатичну, її необхідно доповнити пристроями, що вводять у закон управління складову, пропорційну
інтегралу від відхилення.
Астатична
система регулювання частоти обертання
двигуна постійного току приведена на
мал. 1.7. Крім того, у зворотній зв’язок
по частоті обертання включено електромагніт
ЕМ, якір
якого утримується пружиною С,
потенціометр R1
і електродвигун
![]() ,
вал якого пов’язаний із повзунком
реостата R
в ланцюгу ОЗГ.
,
вал якого пов’язаний із повзунком
реостата R
в ланцюгу ОЗГ.

При
частоті обертання
вала
робочої машини РМ, рівної заданій,
система настроюється так, що напруга,
яка знімається з потенціометра R2
та яка підводиться до двигуна
,
дорівнює нулю: повзунок
![]() знаходиться проти середньої точки
знаходиться проти середньої точки
![]() потенціометра R2.
потенціометра R2.
При зростанні або зменшенні частоти обертання рівновага між зусиллям пружини С і зусиллям, що утримує якір електромагніта, порушується. Повзунок піднімається в гору (при зростанні , тобто при зростанні ) або опускається у низ (при зменшенні , тобто при зменшенні ). Таким чином, до двигуна буде подана напруга того або іншого знака. В результаті повзунок реостата R у ланцюгу ОЗГ переміститься в такому напряму, щоб змінити напругу настільки, наскільки потрібно для відновлення заданого значення . Як видно з малюнка, процес регулювання буде продовжуватися доти, доки відхилення від заданого значення цілком не усунеться, тому що тільки в цьому випадку припиниться обертання допоміжного двигуна і переміщення повзунка реостата R.
З приведеного прикладу очевидно, що надання системі астатичних властивостей істотно ускладнило її, зробило більш дорогою і менш надійною. Крім того, як відзначено вище, у системі можуть виникнути небажані коливання вихідної величини. Тому астатичне регулювання здійснюється в тих випадках, коли необхідно цілком усунути відхилення регульованої величини від необхідного значення, навіть за рахунок ускладнення системи і погіршення деяких динамічних властивостей системи.