

Величину , що характеризує стан об’єкта управління оу (мал. 1.1), та якою
потрібно
управляти, назвемо вихідною,
або керованою
(регульованою)
величиною.
У загальному випадку вихідна величина
являє собою вектор
![]() .
Будь-який реальний об’єкт
знаходиться під впливом навколишнього
середовища, яке виявляється збуджуючих
впливах
.
Будь-який реальний об’єкт
знаходиться під впливом навколишнього
середовища, яке виявляється збуджуючих
впливах
![]() ,
прикладених до ОУ. Ці впливи намагаються
вивести ОУ із заданого стану, для
приведення в який до об’єкта
необхідно прикладати управляючі впливи,
які назвемо вхідними
впливами
,
прикладених до ОУ. Ці впливи намагаються
вивести ОУ із заданого стану, для
приведення в який до об’єкта
необхідно прикладати управляючі впливи,
які назвемо вхідними
впливами
![]() .
Місце прикладання вхідного впливу
назвемо входом.
.
Місце прикладання вхідного впливу
назвемо входом.
Таким
чином, задача управління о’єктом
зводиться до того, щоб вибрати необхідні
вхідні впливи
![]() ,
які за будь-яких збурюючих впливів F
забезпечували б задане
значення вихідної величини
.
У деяких випадках задача управління
об’єктом зводиться до
задачі регулювання – забезпечення
сталості вихідної величини.
,
які за будь-яких збурюючих впливів F
забезпечували б задане
значення вихідної величини
.
У деяких випадках задача управління
об’єктом зводиться до
задачі регулювання – забезпечення
сталості вихідної величини.
Для простоти будемо розглядати об’єкти управління, що характеризуються однією вихідною величиною , однією вхідною і локалізованим збуджуючим впливом f.
Найчастіше регулюючий вплив не може бути прикладений безпосередньо до об’єкта управління, а формується за допомогою технічних пристроїв, які називають регуляторами. Регулятор Р і об’єкт управління ОУ складають систему управління (регулювання) (мал. 1.2, а).
Можливе
управління по розімкненому і по замкненому
циклу. У першому випадку між вихідною
та вхідною величинами відсутній
безпосередній зв’язок. Він здійснюється
через регулятор і об’єкт
управління. Управління по розімкненому
циклу звичайно виконується за допомогою
оператора
![]() (мал.
1.2, а), який, спостерігаючи за значенням
вихідної величини
(мал.
1.2, а), який, спостерігаючи за значенням
вихідної величини
![]() ,
встановлює необхідні значення вхідної
величини
,
встановлює необхідні значення вхідної
величини
![]() .
Управління по
.
Управління по

розімкненому циклу ще називають управління з розімкненим зворотнім зв’язком. Таке управління з неодмінною участю людини (оператора) називається ручним управлінням.
При
управлінні по зазначеному циклу зміни
вихідної величини передаються на вхід
системи за допомогою сукупності
пристроїв, які називаються зворотнім
зв’язком
(ЗЗ) (мал. 1.2, б). Вхідною величиною
зворотного зв’язка є
вихідна величина об’єкта
управління
.
Вихідну величину зворотного зв’язку
позначимо
![]() .
Ця величина, при накладанні на вхідну
величину, формує регулюючий вплив
.
Ця величина, при накладанні на вхідну
величину, формує регулюючий вплив
![]() на вході регулятора, що, у свою чергу,
формує регулюючий вплив
на вході регулятора, що, у свою чергу,
формує регулюючий вплив
![]() ,
що прикладається до об’єкта
управління. Утворений таким способом
зворотній зв’язок
називажться головним
зворотним зв’язоком.
,
що прикладається до об’єкта
управління. Утворений таким способом
зворотній зв’язок
називажться головним
зворотним зв’язоком.
Для здійснення управління за схемою мал. 1.2, б необхідно забезпечити умову
![]() (1.1)
(1.1)
тобто
вихідна величина зворотного зв’язоку
повинна відніматися з величини на вході
системи. Такий зворотний зв’язок
називається від’ємним.
Віднімання управляючих впливів
проводиться в підсумовуючому пристрої
![]() (мал. 1.2, б).
(мал. 1.2, б).
Розглянемо докладніше управління по замкненому циклу. Нехай задача управління зводиться до підтримки підтримки величини на заданому рівні. Підбором відповідного значення величини встановлюється необхідне значення величини . Далі процес регулювання здійснюється без участі оператора (людини), тобто автоматично. Дійсно, якщо , наприклад, перевищать задані значення, то на вхід ЗЗ надійде управляючий сигнал, більший за той, який мав місце при заданому значенні вихідної величини . Це призведе до зменшення величини і [див. Рівняння (1.1)], що при зменшенні під збурюючим впливом f процес управління також буде спрямований на стабілізацію .
Управління по замкненому циклу називають також управлінням із замкненим від’ємним зворотнім зв’язком.
Якщо вихідна величина зворотного зв’язку складається з величиною , то такий зворотний зв’язок називається додатнім. При цьому
![]()
![]() (1.2)
(1.2)
якщо розглянути процес управління за схемою мал. 1.2, б, ґрунтуючись на виразі (1.2), то легко переконатися, що в цьому випадку управління не можливе: будь-яке відхилення величини від заданого буде посилюватися системою. Таким чином, головний зворотний зв’язок повинен бути тільки від’ємним.
Процес управління, що здійснюється без участі людини (мал. 1.2, б), називається автоматизованим. Така схема управління є типовою для автоматичного управління будь-якими об’єктами, характер роботи яких дозволяє перевести їх в автоматичний режим.
Сукупність всіх пристроїв, що забезпечують автоматичне управління об’єктом, називається системою автоматичного управління (САУ). У тих випадках, коли система забезпечує стабілізацію управляючої величини в заданих межах, називається системою автоматичного регулювання(САР). Очевидно, автоматичне регулювання є окремим випадком автоматичного управління. Останнє, проте, забезпечує управління об’єктом по більш складних законах, ніж стабілізація управляючої величини.
З мал. 1.2, б очевидно, що САУ може бути визначена як сукупність об’єкта управління і регулятора (зворотній зв’язок при цьому розглядається як частина регулятора). Складність структури регулятора в конкретній системі автоматичного управління залежить від призначення об’єкта управління і необхідних режимів його роботи. Проте в будь-якому регуляторі повинні міститися джерела інформації про задачі і регулятори управління, пристрої, що аналізують інформацію та управляючі впливи, що генеруються, виконавчі пристрої, що реалізують їх.схема системи управління, подана як сукупність елементів, що виконують визначене функціональне призначення, називається функціональною схемою системи. Представлення системи управління у вигляді функціональних схем дозволяє аналізувати різноманітні по фізичній сутності системи з позицій з позицій ряду загальних вимог.
Незалежно
від призначення системи, фізичної
природи її окремих частин, їхнього
конструктивного виконання функціональна
схема системи управління в загальному
вигляді може бути подана як сукупність
таких функціональних елементів (мал.
1.3): УЕ – управляючий (що задає) елемент;
СП –
сумуючий пристрій; КП
– послідовно корегуючий пристрій; П-
підсилюючий елемент; ВЕ
- виконавчий елемент;
МЗЗ – місцевий зворотній зв’язок; ОУ
– об’єкт управління; ГЗЗ – головний
зворотній зв’язок.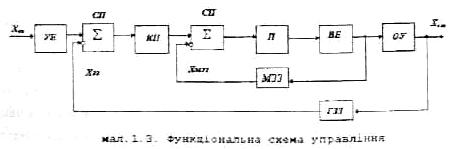
Регулюючий
вхідний вплив
прикладається до елемента УЕ, вихідна
величина якого порівнюється з вихідною
величиною головного зворотного зв’язку
![]() ,.Результуючий
вплив коригується в послідовному
корегуючому пристрої КП та після
порівняння з величиною
,.Результуючий
вплив коригується в послідовному
корегуючому пристрої КП та після
порівняння з величиною
![]() - сигналом місцевого зворотного зв’язку
– підсилюється в підсилюючому пристрої
П. Далі регулюючий вплив за допомогою
виконавчого елемента ВЕ передається
на об’єкт управління ОУ. Функції
головного зворотного зв’язку ГЗЗ були
описані вище.
- сигналом місцевого зворотного зв’язку
– підсилюється в підсилюючому пристрої
П. Далі регулюючий вплив за допомогою
виконавчого елемента ВЕ передається
на об’єкт управління ОУ. Функції
головного зворотного зв’язку ГЗЗ були
описані вище.
Місцевий зворотній зв’язок МЗЗ виконує функції, аналогічні функціям ГЗЗ, але цей зв’язок охоплює не всю систему, а лише частину її, передаючи змінні вихідної величини деякого проміжного елемента системи на вхід іншого попереднього. Якщо ГЗЗ може бути тільки від’ємним, то МЗЗ може бути як від’ємним, так і додатнім. Знак місцевого зворотного зв’язку і необхідний характер зміни величини визначаються в процесі аналізу системи. Місцевий зворотний зв’язок називають також паралельним коригуючим пристроєм у тих випадках, коли він формується за результатами динамічного аналізу системи, а не є функціональною частиною самої системи.
Функціональні елементи конкретної системи управління конструктивно представляють собою різноманітні механічні, електричні, гідравлічні, пневматичні, електронні та інші пристрої: При цьому той самий функціональний елемент може містити в собі декілька конструктивних елементів і, навпаки, декілька функціональних елементів можуть бути пов’язані в один конструктивний вузол.
В якості управляючих або елементів, що задають, використовуються, наприклад, джерела еталонної напруги, еталонні опори і т. п., впливаючи на які можна встановлювати задані значення змінних.
Головний зворотний зв’язок звичайно містить в собі декілька конструктивних елементів, серед яких найбільш типовими є перетворювачі – датчики, призначені для перетворення однієї фізичної величини в іншу, більш зручну для контролю, вимірів і подальшого використання в якості регулюючого сигналу. Перетворювачами можуть служити трансформатори, випрямлювачі, інвертори, індуктивні елементи, датчики температури, тиску, частоти обертання (наприклад, тахогенератори) та інші.
Послідовні і паралельні корегуючи пристрої забезпечують необхідні закони управління в системі. Ці пристрої звичайно вводяться в робочу систему додатково за результатами аналізу її динамічних властивостей. Часто в якості корегуючи пристроїв використовуються конструктивні елементи головної системи зі зміною деяких інших параметрів (опорів, індуктивностей, ємностей і т. п.).
Підсилювальні пристрої призначені для посилення управляючих впливів, які частіше усього малопотужні і не можуть безпосередньо використовуватися для цілей управління. У якості підсилювачів у системах використовуються електронні, електромашинні, магнітні, гідравлічні та інші підсилювачі.
Виконавчі елементи призначені для надавання руху регулюючим органам об’єкта управління, від положення яких залежить значення керованих величин системи. У якості виконавчих елементів широко використовуються, наприклад, електродвигуни різноманітних типів: двигуни постійного струму, двофазні та трьохфазні асинхронні машини та ін.
Крім ручного та автоматичного управління широко використовується автоматизоване управління. На сучасному етапі розвитку теорії управління під автоматизованим розуміється управління об’єктом у системі з розімкнутим зворотнім зв’язком за участю людини (людей), які аналізують стан об’єкта за допомогою електронно-обчислювальних машин. Системи, що реалізують таке управління, називаються автоматизованими системами управління (АСУ). При цьому, якщо об’єкт управління відноситься до типу технічних, то системи управління, побудовані за вказаним принципом, називаються автоматизованими технологічними процесами. Якщо об’єкт управління є об’єктом виробничо-економічного або соціального характеру, то система управління ним відноситься до автоматизованих систем організаційного управління (АСОУ).
В останні роки все більш широко впроваджується інтегроване управління, реалізоване інтегрованими автоматизованими системами управління (ІАСУ). В ІАСУ об’єктами управління є технічні, виробничо-економічні, організаційні і соціальні системи. Так само, як і АСУ, ІАСУ створюються і функціонують на основі ЕОМ і економіко-математичних методів, які використовуються для управління технічними об’єктами, технологічними процесами, для планування, контролю, аналізу і регулювання виробництва в цілому.
Загальна схема процесу управління в АСУ і в ІАСУ подана на мал. 1.4. У цій схемі керованому об’єкту (процесу, системі) задається визначений стан , наприклад необхідні параметри технології, терміни і обсяги випуску продукції і т. п. Під впливом зовнішнього середовища, до складу якого входять і вищі органи управління, а також під впливом процесів, що відбуваються в середині керованої системи (знос обладнання, зміна кваліфікації персоналу, морально-психологічного клімату і т. п.), об’єкти управління виходять із заданого стану.
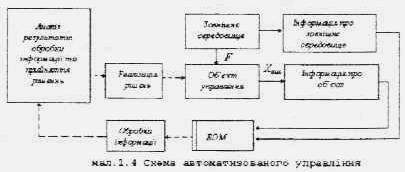
Інформація про стан зовнішнього середовища і про стан керованої системи збирається, опрацьовується за допомогою ЕОМ і аналізується з використанням економіко-математичних моделей, розміщених в запам’ятовуючих пристроях ЕОМ. В результаті аналізу формуються управляючі впливи, які реалізуються за допомогою системи організаційно-технічних заходів.
При автоматизованому управлінні технічними об’єктами і технологічними процесами збір інформації про стани об’єкта (процесу) і середовища здійснюється зі допомогою датчиків і автоматичної системи передачі інформації від місця її виникнення до ЕОМ. При управлінні виробничо-економічними й організаційними системами збір і передача інформації здійснюється як із використанням датчиків, так і спеціально створеною системою збору, реєстрації і передачі виробничо-економічної інформації..
Співставляючи мал. 1.4 і 1.2, можна зауважити, що автоматизоване управління використовується по розімкненому циклу і за участю людей (операторів). Рішення про вибір характеру регулюючого впливу при автоматизованому управлінні так самою як при ручному, приймає людина (особа, що приймає рішення, ОПР). Проте, на відміну від ручного управління, автоматизоване управління формується на базі ЕОМ і економіко-математичних методів – апарата, необхідного для аналізу складних систем.
Таким чином, автоматизоване управління можна визначити як інтегровану автоматизовану систему управління з розімкненим зворотнім зв’язком, в контурі якого використовуються ЕОМ і ОПР.
Систему автоматизованого проектування (САПР) можна визначити як інтегровану автоматизовану систему управління, об’єктом управління якої є процес вибору проектно-конструкторських рішень на основі економіко-математичних моделей виробів, конструкцій, архітектурно-планувальних варіантів тощо.