

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Федеральное государственное образовательное учреждение
высшего профессионального образования
“Казанский государственный архитектурно-строительный университет”
Институт транспортных сооружений
Кафедра дорожно-строительных машин
М.Г.Яруллин
Методические указания
для выполнения расчетно-графических работ
для студентов-заочников
Казань – 2012
Задание 1. Исследование структуры и кинематики плоских шарнирно-рычажных механизмов
1.1. Порядок выполнения работы.
1. Начертить тонкими линиями схему механизма в заданном масштабе для 12 положений кривошипа, указанных в задании.
2. Два положения механизма, указанных в задании, обвести основными линиями и для них построить планы скоростей и вычислить масштаб скоростей.
3. Построить два плана ускорений и вычислить масштаб ускорений.
4. Начертить траекторию центра масс указанного звена, совершающего плоскопараллельное движение, и определить радиусы кривизны этой траектории для двух обведенных положений механизма.
Графическая часть работы выполняется на листе ватмана (миллиметровки) формата А3. На листе располагаются: план положений механизма, 2 плана скоростей и 2 плана ускорений.
В расчетно-пояснительной записки приводится пояснение к построению плана скоростей и плана ускорений для одного положения механизма:
1. Составляются векторные уравнения для определения скоростей и ускорений шарнирных точек.
2. Вычисляются радиусы кривизны траектории выбранного центра масс, угловые скорости и угловые ускорения звеньев для двух выбранных положений механизма.
1.2. Построение плана положений механизма и траекторий точек звеньев
Пусть требуется построить схему механизма, изображенного на рис. 1.1 в масштабе KL, м/мм, для нескольких положений кривошипа ОА, отмеченных положением принадлежащей ему точки А (А0, А1, А2 и А3). Положения остальных звеньев механизма, соответствующие заданным положениям кривошипа ОА, находим методом засечек.
Точка В движется по дуге «b–b» окружности радиуса ВС. Ее положение В1, соответствующее заданному положению кривошипа ОА1, определяется пересечением дуги «b–b» дугой радиуса = АВ, проведенной из центра А1. Положение точки D1, принадлежащей звену 2, определяется пересечением дуг радиуса 1 = AD и радиуса 2 = BD, проведенных соответственно из точек А1 и В1. Соединив точку В1 с точками А1 и С и опустив перпендикуляр из точки D1 на отрезок A1 B1, получим положения звеньев 2 и 3 в зависимости от заданного положения кривошипа 1. Положение точки F звена 4 определяется пересечением луча D1E с дугой радиуса D1F1. Определив положение точек D1 и F1 и, следовательно, звена 4, найдем положение точки S4.

Рис. 1.1. Схема построения положений звеньев механизма
Аналогичным способом вычерчиваются и другие положения механизма. Затем, соединив плавной кривой найденные положения точки, например, S4 – центра масс звена 4, получим ее траекторию *.
1. 3. Построение планов скоростей и ускорений
На рис. 1.2, а представлен механизм, начерченный в масштабе KL, м/мм. Пусть кривошип 1 этого механизма вращается с постоянной угловой скоростью 1, 1/c. Требуется определить скорости и ускорения всех точек, указанных на схеме механизма, а также угловые скорости и угловые ускорения его звеньев.
Величина скорости точки А определяется по формуле
VA = 1 lOA, м/с, (1.1)
где lOA = KL ОА – длина кривошипа, м; ОА – отрезок на чертеже, изображающий в масштабе KL длину кривошипа, мм; а направление – в соответствии с направлением 1 (перпендикулярно ОА).
Для определения скорости точки В составим векторное уравнение
VB = VA + VB/A. (1.2)
В
этом уравнении известны величина и
направление вектора
![]() ,
а
также направления векторов
,
а
также направления векторов
![]() (
ВС)
и
(
ВС)
и
![]() (
АВ).
(
АВ).
В уравнении (1.2) два неизвестных элемента: величина скорости VB и VB/A. А так как векторное уравнение соответствует двум скалярным, то указанное уравнение имеет определенное решение. Для определения этих неизвестных строим многоугольник (план) скоростей (рис. 1.2, б). По указанному в задании (см. 1.10) отрезку оа, изображающему на чертеже скорость VA, подсчитываем масштаб скорости
KV = VA/oa, м/(смм) (оа =70 мм).
Из произвольно взятой на чертеже точки о откладываем отрезок оа перпендикулярно ОА. Через конец этого отрезка (точку а) проводим прямую перпендикулярно АВ, а через точку о – прямую перпендикулярно ВС. Полученная от пересечения этих прямых точка b определяет длины отрезков оb и аb, которые изображают на чертеже скорости VВ и VB/A. Величины этих скоростей:
VB = obKV, м/с; VB/A = abKV, м/с.
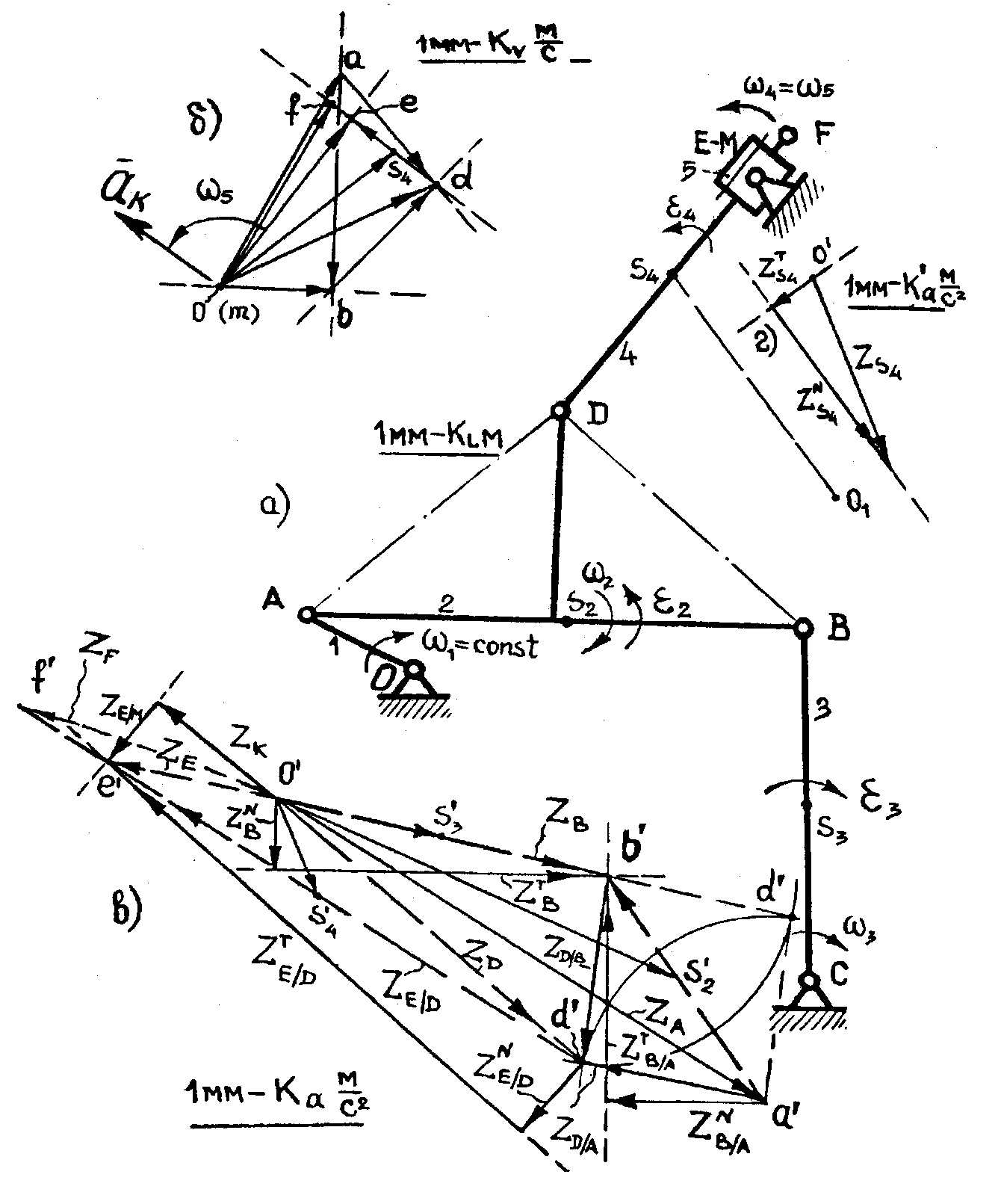
Рис. 1.2. Построение планов скоростей и ускорений
Для определения скорости точки D составим два уравнения:
 VD
= VA
+ VD/A,
VD
= VA
+ VD/A,
(1.3)
VD = VB + VD/B,
и решим их совместно. Для чего через точку a проведем прямую перпендикулярно AD и через точку b – прямую перпендикулярно DB. Пересечение этих прямых определяет точку d, отрезок od и, следовательно, скорость VD, численное значение которой
VD = odKV, м/с.
Скорость точки Е, лежащей на звене 4 и совпадающей в данный момент с неподвижной точкой М механизма, определяется двумя векторными уравнениями:
 VE
=VD
+VE/D,
VE
=VD
+VE/D,
(1.4)
VE = VM +VE/M =VE/M,
так какVM = 0.
Для
решения первого уравнения через точку
d
проведем прямую перпендикулярно DF,
а для решения второго
– через
точку о
(то же и точку m)
проведем прямую параллельно DF.
При пересечении этих прямых получим
точку e,
определяющую вектор
![]() скорости точки Е
и вектор
скорости точки Е
и вектор
![]() относительной скорости VE/D.
Численные значения скоростей находятся
по формулам:
относительной скорости VE/D.
Численные значения скоростей находятся
по формулам:
VE = oeKV, м/с,
VE/D = edKV, м/с.
Скорость точки S4 определяется из уравнения
VS4 =VD +VS4/D
и скорость точки F – из уравнения
VF =VD +VF/D .
Поскольку
VS4/D
/VE/D = S4D/ED,
VF/D
/VE/D = FD/ED
и,
следовательно, VS4/D = VE/D S4D/ED
и VF/D = VЕ/D
FD/ED,
то,
прибавив в первом случае к вектору
![]() (рис. 1.3, б)
вектор ds4 = VS4/D
/KV =
= VE/D S4D/ED
KV
=
S4D/ED,
получим
вектор
(рис. 1.3, б)
вектор ds4 = VS4/D
/KV =
= VE/D S4D/ED
KV
=
S4D/ED,
получим
вектор
![]() скорости точки S4;
во втором случае, прибавив к вектору
вектор
скорости точки S4;
во втором случае, прибавив к вектору
вектор
fd =VF/D / KV = VF/D FD/ED KV =ed FD/ED,
получим
вектор
![]() скорости
точки F.
скорости
точки F.
Численные значения этих скоростей:
VS4 = os4KV, м/с,
VF = ofKV, м/с.
Теперь найдем угловые скорости звеньев.
Угловая скорость шатуна 2
2 = VB/A / lAB, 1/c,
где lAB = KL AB – длина шатуна, м;
то же самое
2 = VD/A / lAD = VD/B / lBD, 1/c,
где lAD = KL AD и lB D = KL BD, м.
Угловая скорость балансира 3
3 = VB / lBС, 1/c,
и звена 4 (то же и звена 5)
4 = 5 = VF/D / lFD *, 1/c,
где lВС = KL ВС – длина шатуна 2 и lFD = KL F D – длина звена 4, м; lS4D = KL S4 D, м.
Для определения направления угловой скорости, например, звена 4, переносим скорость VF/D в точку F и рассматриваем движение точки F относительно D в направлении скорости VF/D. Устанавливаем, что 4 направлена против хода часовой стрелки. Аналогично, перенеся VВ и VB/A в точку В, устанавливаем что 3 и 2 направлены также против хода часовой стрелки.
Перейдем теперь к определению ускорений.
Ускорение точки А определяется по формуле
аА
=
![]() =
=
![]()
lOA,
м/с2,
lOA,
м/с2,
(так как 1 = соnst и 1 = 0) и направлено от точки A к точке О.
Ускорение точки B находится из уравнения
аB
=
![]() +
+
![]() +
+
![]() .
.
А
так как точка В
движется по окружности, то ее ускорение
будет складываться из нормального
ускорения
![]() и тангенциального ускорения
и тангенциального ускорения
![]() ,
т. е.
,
т. е.
аB
=
![]() +
+
![]() ,
,
поэтому окончательно будем иметь
+ = + + . (1.5)
где
СВ
и
![]()
АВ.
АВ.
В
этом уравнении аА
получено
выше, а
и
![]() находятся
по формулам
находятся
по формулам
=
![]() /lBC,
м/с2,
и
=
/lBC,
м/с2,
и
=
![]() /lAB,
м/с2.
/lAB,
м/с2.
Для решения уравнения (1.5) из произвольно взятой точки о’ (рис. 1.2, в) по направлению (параллельно BC по направлению от точки B к точке С) отложим отрезок
![]() =
/Ka,
мм,
=
/Ka,
мм,
где Kа – произвольно взятый масштаб ускорения *, м/(с2мм). Через его конец проводим прямую перпендикулярно ВС. Затем из точки о' параллельно ОА (по направлению от точки А к точке О) отложим отрезок zA = aA / Ka, мм.
Из
его конца параллельно АВ
(по направлению от точки
В
к точке А)
отложим отрезок
![]() =
/Ka,
мм,
и
через его конец проведем прямую
перпендикулярно АВ.
Пересечение проведенных прямых даст
точку b,
которая определяет длины отрезков
=
/Ka,
мм,
и
через его конец проведем прямую
перпендикулярно АВ.
Пересечение проведенных прямых даст
точку b,
которая определяет длины отрезков
![]() и
и
![]() ,
которые в масштабе KA
изображают
тангенциальные ускорения
и
.
Численное значение этих ускорений
,
которые в масштабе KA
изображают
тангенциальные ускорения
и
.
Численное значение этих ускорений
= Ka , м/с2, и = Ka , м/с2.
Ускорения аB и аB/А изобразятся на чертеже отрезками zB и zB/А, а их величины найдутся по формулам
аB = Ka zB, м/с2, и аB/А = Ka zB/А, м/с2.
Угловые ускорения звеньев 2 и 3 находятся по формулам
2
=
![]() /lAB,
1/c2,
и 3
=
/lBС,
1/c2.
/lAB,
1/c2,
и 3
=
/lBС,
1/c2.
Для установления направления 2 и 3 перенесем ускорения и в точку В и, рассматривая движение В относительно точек А и С, установим, что 2 направлено против часовой стрелки, а 3 – по часовой стрелке.
Ускорение точки D находим из уравнений
аD = аА + аD/А,
аD = аB + аD/B,
где аD/А / аВ/А = AD / AB и аD/B / аВ/А = DB / AB,
или же аD/А = аВ/А AD / AB и аD/B = аВ/А DB / AB.
Тогда zD/A = аD/А / Ka = zB/A AD / AB, мм, и zD/В = аВ/А / Ka = = zB/A DВ / AB, мм.
Описываем этими отрезками как радиусами окружности вокруг точек а и b. Пересечение этих окружностей дает две точки d . Из них правильной является та, которая образует с точками а и b треугольник, у которого точки d , b и а располагаются по обходу (по направлению углового ускорения 2) в том же порядке, что и на шатуне 2 (треугольник ADB) *. Соединив точку d с точкой о, получим отрезок zD, который в масштабе Ka изображает на чертеже ускорение точки D. Численное значение ускорения аD = Ka zD, м/с2.
Для определения ускорения точки Е, принадлежащей звену 4 и совпадающей в данный момент с неподвижной точкой М, составим два уравнения
 аE
=аD
+
аE
=аD
+
![]() +
+
![]() ,
,
аE = аM +аE/M +аK =аK +аE/M,
где
![]()
DF,
аE/M
DF.
DF,
аE/M
DF.
Нормальное
ускорение
![]() и ускорение Кориолиса определяются по
формулам
=
и ускорение Кориолиса определяются по
формулам
=
![]() / lED,
м/с2,
и аK
= 25VE/M,
м/с2.
/ lED,
м/с2,
и аK
= 25VE/M,
м/с2.
Для выявления направления аK необходимо повернуть вектор VЕ/М на 90° в сторону 5 (см. рис. 1.2, б).
Выполнив расчеты, приступаем к графическому решению уравнений, определяющих ускорение точки D (рис. 1.2, б). Для этого от точки d ' откладываем отрезок
znE/D = аnE/D /Ka, мм,
параллельно ED, направляя его от точки Е к точке D. Через конец этого отрезка проводим прямую линию перпендикулярно ED(DF). Затем из точки о' параллельно аK откладываем отрезок
zK = аK /Ka, мм,
и через его конец проводим прямую параллельно ED. Пересечение указанных прямых дает точку e', которая определяет отрезки и zE/M, изображающие на чертеже ускорения и aE/M. Численные их значения
= Ka zE/D, м/с2, и aE/М = Ka zE/М, м/с2.
Ускорение точки Е изображается на чертеже отрезком zE, а его численное значение определяется по формуле
аE = Ka zE, м/с2.
Ускорения точек S4 и F найдем из уравнений
аS4 = аD + аS4/D,
аF = аD + аF/D,
причем аS4 / аE/D = S4D / DE и аF/D / аF/D = FD / DE, и, следовательно,
аS4 = аE/D S4D / DE и аF/D = аE/D FD / DE.
Прибавив к o'd ' отрезок
d's4 = аS4/D / Ka = zE/D S4D / DE, мм,
и отрезок
d' f’ = аF/D / Ka = zE/D S4D / DE, мм,
получим отрезки o's'4 и o'f ', которыми изображаются на чертеже ускорения аS4 и аF. Численные значения ускорений
аS4 = Ka zS4, м/c2, и аF = Ka zF, м/с2.
Угловое ускорение звена 4 (звена 5)
4 = 5 = / lED, 1/c2,
где lED = KL ED, м.
Перенос ускорения в точку Е (точку М) показывает, что 4 направлена против часовой стрелки.
Рассмотрим построение планов скоростей и ускорений для механизма, представленного на рис. 1.3, а. Масштаб длины KL, м/мм, а также угловая скорость кривошипа 1 известны.
Зная 1, находим скорость
VA = 1 lOA, м/с,
которая на плане скоростей (рис. 1.3, б) изображается отрезком оа.
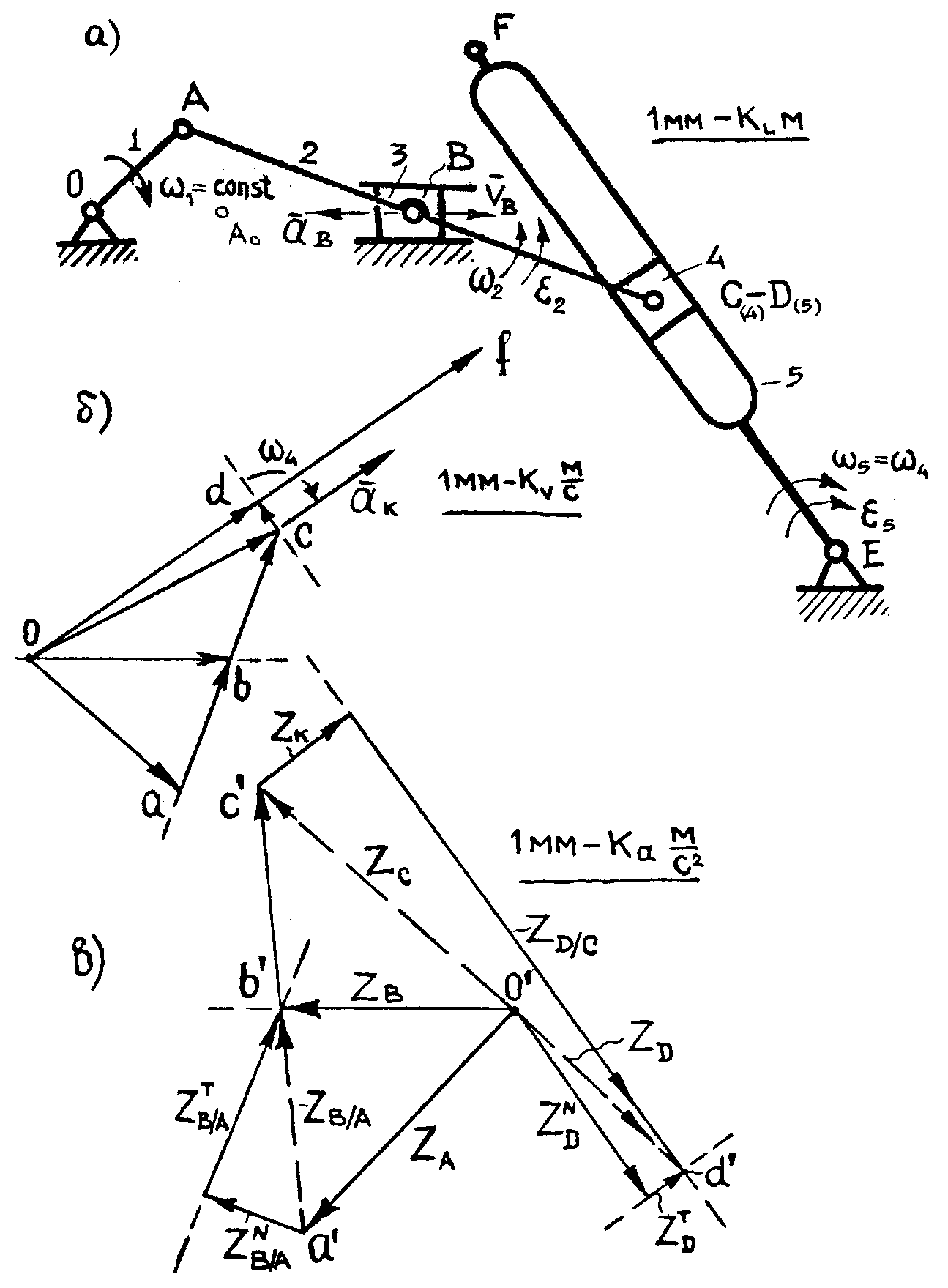
Рис. 1.3. Второй случай построения планов скоростей и ускорений
Затем определяем скорость точки В, которую можно рассматривать как состоящую из переносной скорости точки А (VA) и относительной скорости точки B вокруг точки A (VB/A), т.е.
VB = VA +VB/A,
где VB OB и VB/A АВ.
Для решения этого уравнения из точки о проводим прямую параллельно ОВ, а через точку а – прямую перпендикулярно АВ. Точка b пересечения указанных прямых определяет длины отрезков оb и аb, изображающих скорости VB и VB/A. Скорость точки С найдем из уравнения
VС =VA +VС/A,
где
VС/A = VВ/A АС / АВ,
поскольку
VС/A / VВ/A = АС / АВ.
В соответствии с этим уравнением, прибавив к отрезку оа по направлению оb отрезок
ас = VС/A / KV = аb АС / АВ, мм,
получим отрезок ос, изображающий скорость VС.
Теперь найдем скорость точки D. Движение точки D можно рассматривать как движение, состоящее из переносного со скоростью VC и относительного со скоростью VD/C, направленной вдоль DE. Тогда
VD =VC +VD/C,
где VD DE и VD/C DE.
Поэтому через точку о проводим прямую перпендикулярно DЕ и через точку с – прямую параллельно DE. Точка пересечения прямых определяет точку d и отрезки оd и сd, которые изображают на чертеже скорости VD и VD/C.
И, наконец, скорость точки F (рис. 1.3, а):
VF /VD = EF/ED.
Отсюда
VF = VD EF/ED.
На плане скоростей (рис. 1.3, б) эта скорость изображается отрезком
of = VF / KV = od EF / EC,
совпадающим по направлению с отрезком od.
Численные значения скоростей определяются перемножением масштаба скорости и соответствующего отрезка (см. анализ предыдущего механизма).
Угловые скорости звеньев
2 = VB/A / lAB = VC/A / lAC, 1/c,
4 = 5 = VD / lED = VF / lEF, 1/c.
Перенеся скорость VB/A в точку В (или скорость VC/A в точку С), устанавливаем, что 2 направлена против часовой стрелки; а перенеся скорость VD/E в точку D (или то же самое скорость VF в точку F), получаем, что 4 (то же и 5) направлена по часовой стрелке.
Приступаем к определению ускорений. Ускорение точки А
аА = = lOA, м/с2,
и направлено от точки А к точке О.
Для определения ускорения точки B составим уравнение
аB
= аА
+
+
![]() ,
,
где
аB
ОВ,
АВ
и
=
![]() /lAB,
м/с2,
–
нормальная составляющая относительного
ускорения; направлена от точки В
к точке А.
/lAB,
м/с2,
–
нормальная составляющая относительного
ускорения; направлена от точки В
к точке А.
В соответствии с векторным уравнением через точку о' (рис. 1.3, в) проведем прямую параллельно ОВ. Затем из той же точки о' отложим отрезок
zА = аА / Ka, мм,
и к концу его прибавим отрезок
= / Ka, мм,
направив его параллельно АВ от точки B к точке А. Через конец этого отрезка проведем прямую перпендикулярно АВ до пересечения с первой прямой и получим точку b' и отрезки o'b' (zB) и , которые изображают на чертеже ускорения аB и .
Ускорение точки С найдем из уравнения
аС = аА + аС/А.
Входящее сюда ускорение аС/А определяется из пропорции
аС/A / аВ/A = АС / АВ,
и, следовательно,
аС/A = аВ/A АС / АВ.
Отложив на плане ускорений от точки а отрезок
a' c' = аC/A / Ka = zB/A AC / AB, мм,
совпадающий с отрезком zB/A, получим точку с' и отрезок о'с' (zC), изображающий ускорение точки С.
Ускорение точки D, принадлежащей кулисе – звену 5, определяется уравнением
аD = аC + аD/C + аK.
Так как точка D движется по окружности, то
аD
=
![]() +
+
![]()
и предыдущее уравнение примет вид
+ аD = аC + аD/C + аK,
где
![]() DE,
аD/C
DE,
DE,
аD/C
DE,
![]() =
=
![]() / lDE,
м/с2,
/ lDE,
м/с2,
![]() =
/ Ka
и
=
/ Ka
и
аK = 24VD/С
– ускорение Кориолиса, направление его определяется поворотом вектора VD/C на 90° в сторону 4 (показано на рис. 1.3, б).
Выполнив
вычисления, переходим к графическому
решению уравнения, для чего из точки о'
(рис. 1,3, в)
откладываем параллельно DF
(в направлении от точки D
к точке Е)
отрезок
и
![]()
DE;
из
точки с'
– zK
= aK
/ KA,
мм. Через
конец этого отрезка проведем прямую
параллельно
DE.
Пересечение
указанных прямых будет в точке d'.
Отрезки
,
zD/C
и о'd '(zD)
изображают ускорения
,
аD/C
и аD.
DE;
из
точки с'
– zK
= aK
/ KA,
мм. Через
конец этого отрезка проведем прямую
параллельно
DE.
Пересечение
указанных прямых будет в точке d'.
Отрезки
,
zD/C
и о'd '(zD)
изображают ускорения
,
аD/C
и аD.
Ускорение точки F найдем из выражения
аF / аD = EF / ED,
откуда
аF = аD EF / ED.
Это ускорение на плане ускорений изображено отрезком
zF = аF /Ka = zD EF/ED, мм.
Для определения численных значений ускорений необходимо полученные отрезки из плана ускорений умножить на масштаб ускорения (см. анализ первого механизма).
Угловые ускорения звеньев
2 = /lAB, 1/c2, и 4 = 5 = / lED, 1/c2.
Перенос ускорения аB/А в точку В показывает, что 2 направлено против часовой стрелки, а перенос ускорения в точку D устанавливает, что 4 (то же самое 5) направлено по часовой стрелке.
Сравнивая направления 2 и 2, а также 5 и 5, видим, что звенья 2 и 5 движутся ускоренно, сравнение же VB и аB показывает, что ползун 3 движется замедленно.