

2. Моделирование несвязной системыуправления реактором
2.1. Структурный синтез сау
Выходными, подлежащими стабилизации, переменными, являются концентрация целевого компонента, температура в реакторе и уровень жидкости в реакторе.
Анализ структурной схемы объекта и результаты исследования динамических свойств реактора по различным каналам показывают, что аппарат относится к классу связанных объектов управления.
Таким образом, регулирование концентрации Cb предполагается осуществлять путем изменения потока - разбавителя v2, температуры – потоком хладагента vхл, уровня жидкости h – расходом жидкости на выходе из аппарата v.
Н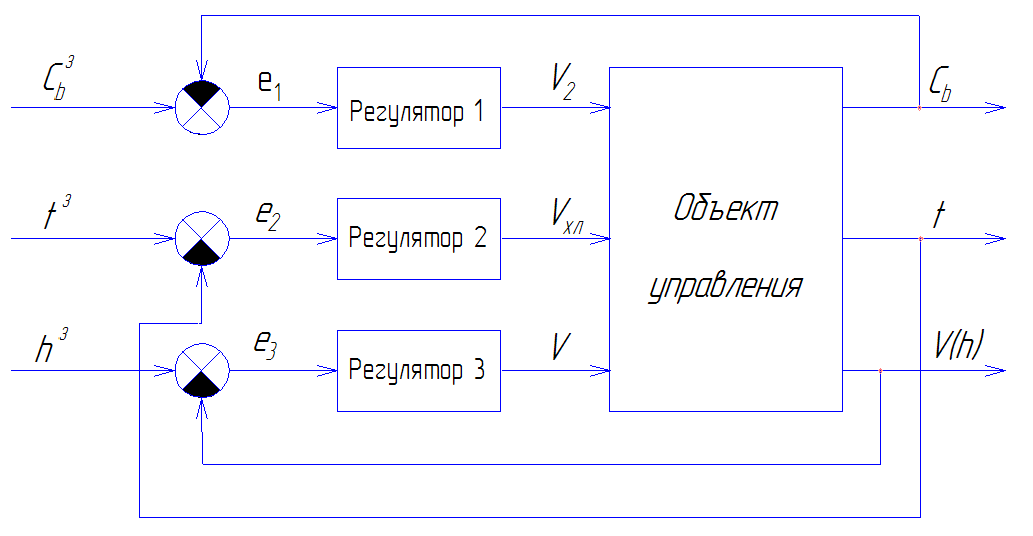 иже
представлена функциональная структура
системы управления.
иже
представлена функциональная структура
системы управления.
µ1=
µ2=
µ3=
Рис. 2.1. Функциональная структурная схема несвязанного регулирования многомерного объекта
Где, Cbз, tз, Vз – заданные значения выходных переменных
Листинг программы, реализующей несвязанную систему управления реатором приведен в приложении 1.
2.2 Алгоритмический синтез
Поскольку объект по каналам регулирования характеризуется малым запаздыванием и является устойчивым, то целесообразно использовать ПИ-алгоритм регулирования:
 (2.1)
(2.1)
При решении задач моделирования систем управления на ЭВМ необходимо иметь математическое описание объекта и регулятора, представленных в одинаковой форме – в виде обыкновенных дифференциальных уравнений. Так как для решения использовалась встроенная функция пакета MathCad Rkadapt для решения системы обыкновенных дифференциальных уравнений, то уравнение преобразовали в дифференциальную форму:
 (2.2)
(2.2)
 -
значение регулирующего воздействия в
статике.
-
значение регулирующего воздействия в
статике.
Подставляя в данное уравнение значение ошибки регулирования из уравнения сумматора, получим уравнения работы регуляторов:
(2.3)
 где
где
Выражения
для
 ,
,
 и dυ/dτ в (2.3) подставляются из уравнений
математической модели объекта.
и dυ/dτ в (2.3) подставляются из уравнений
математической модели объекта.
Следовательно, математическое описание системы управления реактором, примет следующий вид:
Значения выходных переменных в статике будут выступать в качестве начальных условий.
2.3 Параметрический синтез.
Настроечные параметры для регуляторов (1,2) были получены по исследованию динамических и статических характеристик системы. Для определения настроек регуляторов использовались коэффициенты передачи и постоянные времени, расчеты были проведены методом биномиальных коэффициентов. Для расчета регулятора 3 постоянная времени была взята меньше, чем по остальным каналам, предполагая то, что уровень регулируется значительно быстрее. Листинг программы по расчету настроек приведен в приложении 2.
Полученные настройки регуляторов приведены в таблице 2.1.
Таблица 2.1
Регулятор |
Kp |
Ти |
1 |
-15,964 |
151,933 |
2 |
-1,393 |
56,141 |
3 |
-0,05 |
20 |