

1.3 Исследование статики и динамики объекта. Вычисление параметров передаточных функций по динамическим и статическим характеристикам всех исследуемых каналов.
Нужно построить статические и динамические характеристики по целевым каналм регулирования и возмущения, заранее выбрав регулируемые переменные.
Регулируемыми переменными выбираем Св и t, т.к. именно они характеризуют эффективность работы рассматриваемого объекта.
В качестве регулирующих рассмотрим следующие v1, v2, vхл , Савх, tхлвх.
Статику и динамику будем строить в соответствии с оптимальными значениями параметров. Используем нелинейную модель объекта и предполагаем, что уровень постоянен, т.е. V=const.
Подробный пример программы получения статических и динамических характеристик по каналу v1 – CB.
 Построение
динамических характеристик многомерного
объекта управления осуществляется
путем интегрирования системы уравнений
модели при начальных условиях,
соответствующих значениям в рабочей
точке аппарата при ступенчатом воздействии
по указанному каналу (20% от значения в
рабочей точке).
Построение
динамических характеристик многомерного
объекта управления осуществляется
путем интегрирования системы уравнений
модели при начальных условиях,
соответствующих значениям в рабочей
точке аппарата при ступенчатом воздействии
по указанному каналу (20% от значения в
рабочей точке).
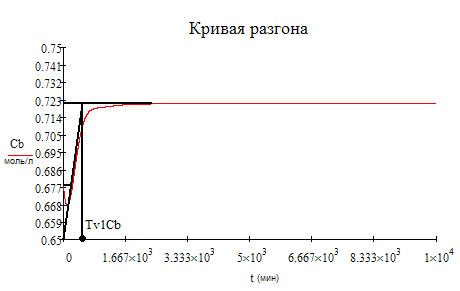
Рис.
1.3 Опрделение T
и k
по кривой разгона v1
– Сb
(+ )
)
Полученная кривая аппроксимируется апериодическим звеном первого порядка, т.е. передаточная функция имеет вид:
W(p)=k/(T*p+1), где
k – коэффициент передачи
Т – постоянная времени
Коэффициент k – это отношение изменения выходной величины к изменению входной.
Методика расчета заключается в следующем, к рабочей точке статической характеристики, по какому – либо каналу, проводим касательную к графику, далее определяем тангенс угла наклона касательной, значение которого является размерным коэффициентом передачи. Постоянная времени определяется путем опускания перпендикуляра из точки пересечения касательной и продолжения линии выхода на установившейся режим.
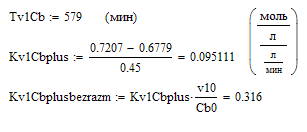
Находим T и k:
Далее аналогично строим еще раз динамику в плюс по данному каналу и дважды в минус.
П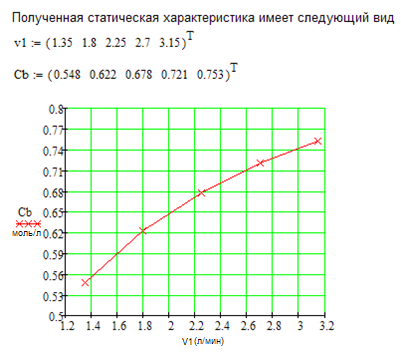 осле
чего по полученным значениям приращения
концентрации компонента В строим
статическую характеристику:
осле
чего по полученным значениям приращения
концентрации компонента В строим
статическую характеристику:
Рис. 1.4 Статическая характеристика по каналу v1 – CB
Данная статическая характеристика практически линейна. Определим размерный и безразмерный коэффициент передачи по данному каналу.
Для этого в рабочей точке статической характеристики проводим касательную (рис. 1.5). Тангенс угла наклона касательной в рабочей точке дает коэффициент передачи объекта. Размерный коэффициент передачи определяем по формуле:
 (1.1.)
(1.1.)
Безразмерный коэффициент передачи определяется по формуле:
 (1.2.)
(1.2.)
где
 - значения переменных в рабочей точке,
- значения переменных в рабочей точке,
 - отклонения параметров от значений в
рабочей точке.
- отклонения параметров от значений в
рабочей точке.
Определим размерный и безразмерные коэффициенты по каналу v1 – CB:
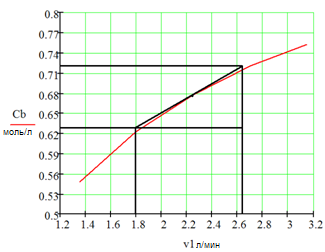
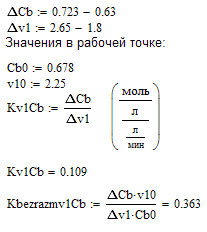 Рис.
1.5 Определение коэффициента передачи
по статической характеристике
Рис.
1.5 Определение коэффициента передачи
по статической характеристике
Н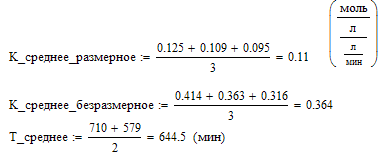 айдём
среднее значение размерных и безразмерных
коэффициентов, используя данные,
получившиеся в ходе построения динамики
в плюс и минус, а также статики. Также
использую динамику в плюс и минус
определим среднее значение коэффициента
Т:
айдём
среднее значение размерных и безразмерных
коэффициентов, используя данные,
получившиеся в ходе построения динамики
в плюс и минус, а также статики. Также
использую динамику в плюс и минус
определим среднее значение коэффициента
Т:
Используя полученные значения постоянной времени и K размерного получаем передаточную функцию по рассматриваемому каналу:
W(p)=0.11/(644.5*р+1)
Последующие каналы рассчитываем аналогично вышеприведенному примеру.
После рассмотрения интересующих каналов была составлена сводная таблица параметров передаточных функций по исследуемым каналам.
И Сводная таблица параметров передаточных функций по исследуемым каналам сследуемый канал |
k д- |
k д+ |
k ст |
kсреднее |
kбезразм д- |
kбезразм д+ |
kбезразм ст |
k таблица 1.3 среднее безразм |
Т (мин) д- |
Т (мин) д+ |
Тсреднее (мин) |
v1 – CB |
0,125 |
0,095 |
0,109 |
0,11 (моль*мин/л2) |
0,414 |
0,316 |
0,363 |
0,364 |
710 |
597 |
644,5 |
v1 – t |
22,913 |
20,939 |
22,917 |
22,256 (К*мин/л) |
0,142 |
0,13 |
0,142 |
0,138 |
468 |
428 |
448 |
v2 – CB |
-0,329 |
-0,307 |
-0,329 |
-0,332 (моль*мин/л2) |
-0,364 |
-0,339 |
-0,363 |
-0,355 |
613 |
548 |
580,5 |
v2 – t |
-15,535 |
-15,347 |
-15,714 |
-15,332 (К*мин/л) |
-0,032 |
-0,032 |
-0,032 |
-0,032 |
275 |
327 |
301 |
CAвх – СВ |
0,817 |
0,775 |
0,8 |
0,797 ((моль/л)/(моль/л)) |
1,445 |
1,371 |
1,416 |
1,411 |
749 |
547 |
648 |
CAвх – t |
71,289 |
71,571 |
80 |
74,467 (К*л/моль) |
0,238 |
0,237 |
0,264 |
0,246 |
463 |
323 |
393 |
tхлvx – CB |
0,0035 |
0,0025 |
0,0027 |
0,0029 (моль/(л*К) |
1,553 |
1,134 |
1,213 |
1,3 |
421 |
372 |
396,5 |
tхлvx – tреактор |
0,913 |
0,844 |
0,914 |
0,89 (К/К) |
0,762 |
0,705 |
0,763 |
0,743 |
276 |
286 |
281 |
tхлvx – tхлрубашка |
0,946 |
0,904 |
1,081 |
0,977 (К/К) |
0,79 |
0,755 |
0,963 |
0,836 |
190 |
165 |
177,5 |
vхл – tреактор |
-4,369 |
-3,241 |
-3,805 |
-3,805 ((К*мин)/л) |
-0,105 |
-0,078 |
-0,091 |
-0,091 |
208 |
221 |
214,5 |
vхл – tрубашка |
-4,684 |
-3,372 |
-4,028 |
-4,028 ((К*мин)/л) |
-0,112 |
-0,081 |
-0,116 |
-0,103 |
150 |
140 |
145 |
vхл – Сb |
-0.013 |
-0.0105 |
-0.012 |
-0.012 ((моль/л)/(л/мин)) |
-0.166 |
-0.134 |
-0.16 |
-0.153 |
428 |
480 |
454 |
Безразмерные коэффициенты используем для выбора каналов регулирования, а в передаточные функции будем подставлять размерные коэффициенты.
Для регулирования
температуры в реакторе t
выберем канал ,
данный канал достаточно прост в реализации
по сравнению с другими каналами.
,
данный канал достаточно прост в реализации
по сравнению с другими каналами.
Объем будем
регулировать расходом на выходе из
реактора v,
так как передаточная функция по каналу
 представляет собой интегральное звено,
и этот канал легко реализуем практически.
представляет собой интегральное звено,
и этот канал легко реализуем практически.
Для регулирования
концентрации целевого компонента Cb
лучше всего выбрать канал Он обладает наибольшим безразмерным
коэффициентом передачи, однако практически
реализовать изменение входной концентрации
компонента A
невозможно, поскольку мы используем
привозное сырье. Поэтому, в качестве
регулирующего выбираем канал
Он обладает наибольшим безразмерным
коэффициентом передачи, однако практически
реализовать изменение входной концентрации
компонента A
невозможно, поскольку мы используем
привозное сырье. Поэтому, в качестве
регулирующего выбираем канал
 .
Этот канал обладает наибольшим
безразмерным коэффициентом передачи
из оставшихся и практически реализуем.
.
Этот канал обладает наибольшим
безразмерным коэффициентом передачи
из оставшихся и практически реализуем.
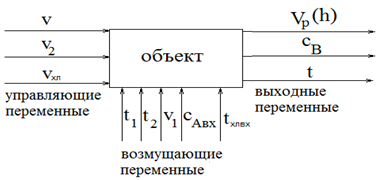
Рис. 1.6. Структура многомерного объекта управления
Далее проверим верна ли полученная нами линеаризованная модель по каналам управления. Для этого нужно построить в одной системе координат кривые разгона с использованием исходной нелинейной и линеаризованной модели.
К анал
V2-Cb:
анал
V2-Cb:
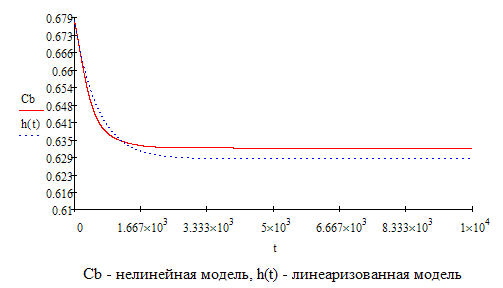
Рис. 1.7. Переходная характеристика по каналу V2-Cb
Канал Vхл-t:


Рис. 1.7. Переходная характеристика по каналу Vhl-tp
Кривые разгона практически совпадают, можно сделать выводы о правильности полученной модели.
Вывод
При помощи математического моделирования был исследован химический реактор, работающий в политропическом режиме, как ОУ.
Нами были построены статические и динамические характеристики по каналам регулирования и возмущения, определены регулируемые переменные и регулирующие их воздействия.
Также нами была предложена линеаризованная модель рассматриваемого объекта в форме передаточных функций.
Рассмотрев данную структуру можно говорить о том, что расход разбавителя оказывает регулирующее воздействие для концентрации целевого компонента и одновременно возмущающее для температуры в реакторе. Аналогично расход хладагента – регулирующее воздействие для температуры внутри реактора и возмущающее для концентрации целевого компонента. Воздействия входной температуры хладагента, расхода главного потока, и входной концентрации вещества А являются возмущениями для температуры внутри реактора и концентрации целевого компонента.
Канал v-V(h) не был исследован в следствии того, что при расчетах мы учитывали постоянство уровня, для того, чтобы не допустить переполнение или опустошение реактора.
Далее нами были построены кривые разгона по каналам управления с использованием нелинейной и линейной моделей. Полученные кривые разгона практически совпадают. Следовательно, полученная линейная модель может с высокой степенью точности описывать нелинейный объект.