

В плоскости варьируемых параметров.
Определение направления штриховки колебательной границы устойчивости производится в соответствии со знаком определителя:

![]()
![]()
(
)
= = -
K![]() sin
-
K
cos
= -
K
sin
-
K
cos
= -
K
![]()
![]()
При перемещении
вдоль колебательной границы от
= 0 до
![]() (
)
(
)
![]() 0,
0,
следовательно, штриховку наносим справа, а при перемещении от = - до 0 ( ) 0, следовательно штриховку наносим слева.
Границу устойчивости ||| типа (на рис.9) штрихуем однократной штриховкой в сторону колебательной границы устойчивости.
6.2. Расчёт параметров системы по заданному критерию качества.
Для построения линии равного запаса устойчивости в плоскости настроек регулятора используем следующие формулы для нахождения К и К :
К
=
[( m - m
T
+
T
) sin
+ ( 2m
T
– 1 ) cos
]
/ ( Ke![]() )
=
=[(0,22-0,22
*190*
+190*
)sin90
+(2*0,22*190*
-1)cos90
]/(
1,092*e
)
=
=[(0,22-0,22
*190*
+190*
)sin90
+(2*0,22*190*
-1)cos90
]/(
1,092*e![]() );
);
K
=
( 1 + m
)
[
Tcos![]() + ( 1 - m
T
) sin
]
/ ( Ke
)
=
+ ( 1 - m
T
) sin
]
/ ( Ke
)
=
= ( ( 1 + 0,22 )[ 190 cos90 + ( 1 - 0,22*190 ) sin90 ]/( 1,092*e ))*100.
Результаты расчета сведены в Таблицу 3. , по данным таблицы построен график линии равного запаса устойчивости для m = 0,22 (Рис. 11.).
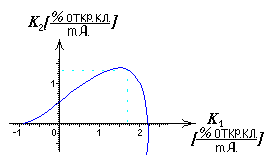
Рис. 11. Кривая линии равного значения запаса устойчивости.
6.3. Выбор настроек регулятора.
Согласно рекомендациям методического указания, выбираем следующие коэф-фициенты:
К
= 1,69 (1,699462) ; К
= 1,33*10![]() (0,0133543) .
(0,0133543) .
7. Построение переходного процесса системы.
Можно считать, что непрерывная система является предельным случаем им-пульсной системы при стремлении периода дискретности к нулю. Поэтому при достаточно малом периоде дискретности процессы в непрерывной и импульсной системах будут близки друг другу.
Воспользуемся операторным методом. Для этого каждый элемент непрерывной системы заменим его дискретным аналогом ( Рис. 12.) , для этого введём в непре-
рывную модель элемента импульсный элемент ( ИЭ ).
W(p)


a) в непрерывном варианте;
ИЭ
ФЭ
Wфэ
(p)
W(p)
![]() (t)
x [n] y (t)
(t)
x [n] y (t)



y [n]
б) в дискретном представлении.
Рис. 12. Модель элемента системы регулирования.
Тогда импульсную модель элемента можно описать разностным уравнением, вид которого будет определяться формирующим элементом (ФЭ). Воспользуемся са-мым простым формирующим элементом – экстраполятором нулевого порядка с пе-редаточной функцией вида:
W![]() (р)
= ( 1 - е
(р)
= ( 1 - е![]() )
/ р,
)
/ р,
где Т = 9 с. - период дискретности. Тогда дискретная передаточная функция моде-
ли непрерывного элемента найдётся как:
W(z) = Z{W (p) * W(p)}=(Z-1)/Z * Z{W(p)/p}.
Заменим каждый элемент нашей системы дискретным аналогом описанного выше вида. Структурная схема дискретной модели системы представлена на Рис. 13.
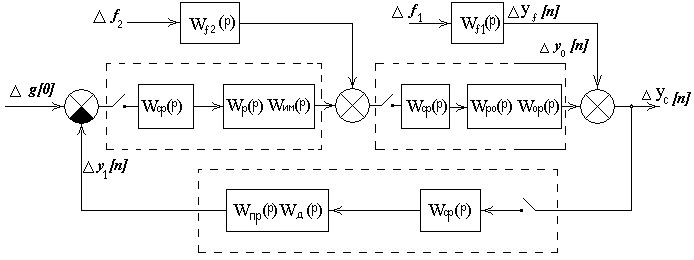
Рис. 12. Дискретная модель системы регулирования влажности бумажного полотна.
Дискретная модель объекта регулирования:
![]() W
(z)
= ( z
– 1 ) / z
* Z
{ K
*
e
W
(z)
= ( z
– 1 ) / z
* Z
{ K
*
e![]() /
( р ( 1 + Тр ))} = К
(
1 – d
) * z
/
( р ( 1 + Тр ))} = К
(
1 – d
) * z![]() /
( z
– d
),
/
( z
– d
),
где d
= e![]()
![]() = e
= e![]() = 0,954, m
=
/T
= 90 / 9 = 10 – целое число.
= 0,954, m
=
/T
= 90 / 9 = 10 – целое число.
: Дискретная модель регулятора:
W![]() (z)
= (z
- 1) / z
* Z{K
* ( K
p
+ K
) / p
}
= K
(K
z
- K
+ K
T
)
/ (z-1)
=
(z)
= (z
- 1) / z
* Z{K
* ( K
p
+ K
) / p
}
= K
(K
z
- K
+ K
T
)
/ (z-1)
=
= 1,04 * ( 1,69 * z – 1,69 + 0,0133 * 9 ) / ( z – 1 ).
Дискретная модель датчика:
W![]() (z)
= K
.
(z)
= K
.
Изменение
регулируемого параметра может происходить
за счёт изменения регу-лирующего
воздействия у![]() (t)
:
(t)
:
g (t) = -1,6 * 1[t] [% вл.].