

![]()
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ
ФЕДЕРАЦИИ
Сыктывкарский лесной институт
Факультет АТП и П
К защите допустить Зав. кафедрой __________________ Сундуков Е.Ю. “___”_______________________ 2011г.
Курсовая работа « Теория Автоматического управления »
Выполнил: ___________________
______________________________
АТП и П , шифр: ______________
Проверил: Тер-Барсегов О.Н.
Сыктывкар
2011 г.
1. Задание. Тема: «Синтез системы автоматического регулирования влажности
бумажного полотна по заданным критериям качества ».
Принципиальная схема АСР влажности:
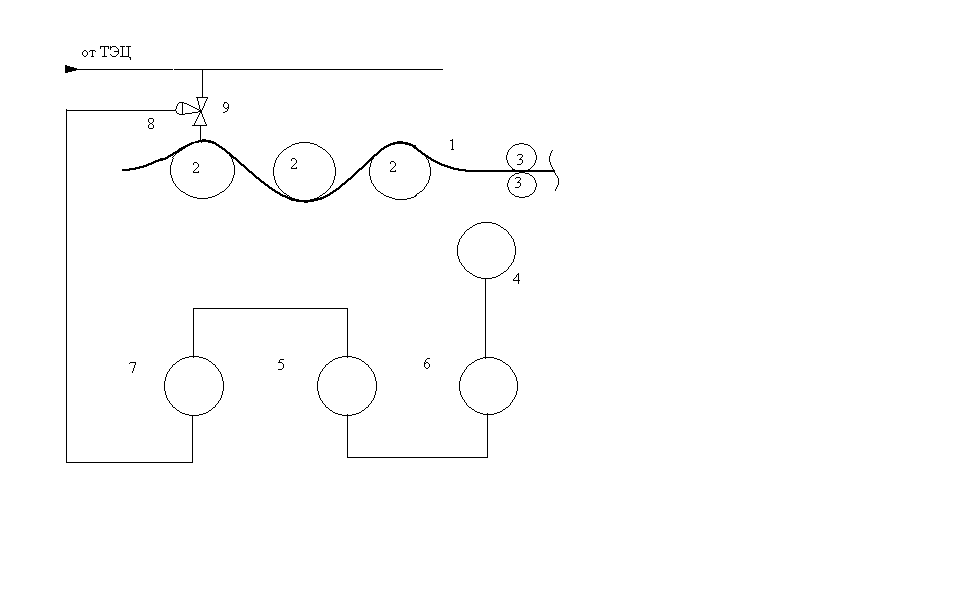 Рис. 1.
Рис. 1.
Обозначения в схеме:
1. Бумажное полотно.
2. Сушильные цилиндры.
3. Каландр.
4. Датчик влажности типа « РОСА ».
5. Преобразователь электрического сигнала в пневматический.
6. Электрический преобразователь сигнала ГСП.
7. Пневматический регулятор.
8. Исполнительный механизм мембранный.
9. Регулирующий орган: клапан.
|
Наименование элементов схемы АСР, их математическая модель, параметры модели. Исходные воздействия и требования к проектируемой системе регулирования. |
Обозначение переменных |
Размерность переменных |
1 |
Объект регулирования. Канал «изменение расхода пара в сущ. группу – измен. влажности бумажного полотна» Математический
модуль объекта:
Параметры объекта: - постоянная времени - коэффициент передачи - запаздывание информации по рассматриваемому каналу |
Т = 190 К
|
c.
c. |
2 |
Измерительное устройство, датчик электронный (4 и 6 элемент). Канал: «изменение влажности - изменение силы тока» Модель
датчика:
Параметр модели: коэффициент передачи |
K |
|
3 |
Преобразователь пневматический. Канал: «изменение силы тока – изменение давления воздуха» Модель преобразователя: Wпр(p) = Kпр Параметр модели: коэффициент передачи |
K |
|
4 |
Регулятор
пневматический, реализующий ПИ –
закон регулирования
|
K K |
|
5 |
Исполнительный пневматический механизм Канал: «давление воздуха – процент открытия клапана» Модель
исполнит. механизма: W Параметр модели: коэффициент передачи |
K |
|
6 |
Регулирующий орган – клапан. Канал: «изменения открытия клапана – изменение расхода пара» Матем.
Модель регулирующего органа:
W Параметр модели: коэффициент передачи |
K = 1,04 |
|
7 |
Типовые входные воздействия: 1.
Изменение задающего воздействия:……………..
2. Изменение концентрации массы:……………….. f (t) = C 3.
Изменение давления пара в гл.
трубопроводе:….
f
(t)
= C |
С = 0,4 С = 1,6 С |
% влажн. % конц. кг/см |
8 |
Требования к качеству проектируемой системе:
|
Е = 0,5 m = 0,22 |
% влажн. |
9 |
Каналы передачи возмущения:
W 2. “изменение давления в главном трубопроводе – изменение расхода пара на входе в сушильную группу”
W
|
K = 0,9
T = 200
K
T = 30
|
с.
c. |
2. – 3. Структурная схема автоматической системы регулирования
бумажного полотна:

Рис. 2. Структурная схема системы регулирования
влажности бумажного полотна.
Модель объекта в операторной форме может быть получена, если применить
преобразование Лапласа к дифференциальным уравнениям модели объекта:
- по каналу
управления:
y![]() (1+Tp)=
K
x(p)
e
(1+Tp)=
K
x(p)
e![]() ,
,
где К [(% влажн.)]/[кг./с.] - коэффициент передачи по каналу управления ;
- по каналу
возмущения:
y![]() (1
+ T
p)=
K
f(p),
(1
+ T
p)=
K
f(p),
где К - коэффициент передачи по каналу возмущения.
Отсюда передаточная функция:
- по каналу управления: W (p)= K e / (1 + Tp),
- по каналу возмущения: W (p)= K / (1 + T p).
4. Описание процесса регулирования.
Объектом регулирования является участок БДМ. Влажность бумажного полотна ( регулируемая величина ) по заданным критериям качества, требуется поддерживать на заданном уровне. Регулирующей величиной является влажность, через клапан. Возмущающее воздействия (принимаемое во внимание в данной работе) – регулирование влажности бумажного полотна по заданным критериям качества. Для выполнения данной задачи регулирования служат:
- датчик влажности типа «РОСА», измеряющий регулируемую величину влажнос-
ти бумажного полотна;
- преобразователь электрического сигнала в пневматический;
- регулирующий орган – клапан;
- мембранный исполнительный механизм, который меняет влажность бумажного
полотна.
Если влажность бумажного полотна равна заданной, сигнал ошибки рассогла-сования ОШ, сформированный сравнивающим устройством регулятора, равен ну- лю и регулирующее воздействие влажность на выходе остаётся неизменным.
При отклонении влажности от задания в сторону увеличения (уменьшения) воз-никает отрицательный (положительный) сигнал ошибки рассогласования, ПИ-регу-лятор создаёт управляющий сигнал на исполнительный механизм (клапан), до тех пор, пока влажность бумажного полотна не сравняется с заданием. Функциональная схема показана на рис.3.
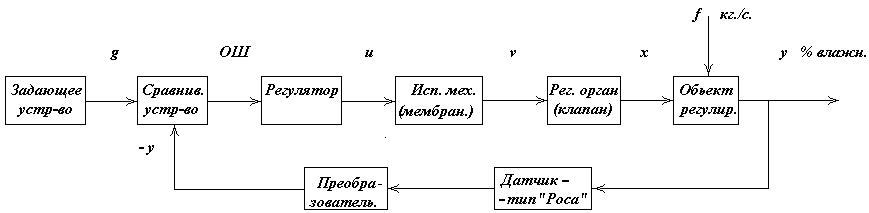
Рис. 3. Функциональная схема автоматического регулирования влажности бумажного полотна.
5. Характеристика объекта по каналу управления.
Найдём переходную функцию объекта по каналу управления. Переходная функ-ция h(t) определяется как переходный процесс на выходе звена при подаче на вход единичного ступенчатого воздействия 1[t] при нулевых начальных условиях. В нашем случае это значит, что расход пара в сушильных цилиндрах увеличится.
0
t
![]() 0,
0,
x(t)
=
![]()
7
[ % влажн./(кг./с.)]
t
![]() 0.
0.
Переходная ( временная ) характеристика для звена 1-го порядка с запазды-ванием определяется выражением:
0, при t ,
h(t) = y (t) = =
K
(1-е![]() ),
[%вл./(кг./с.)], при t
,
),
[%вл./(кг./с.)], при t
,
0, при t 90c.,
=
7
* (1-e![]() ),
[%вл./(кг./с.)], при t
90c.
),
[%вл./(кг./с.)], при t
90c.
Для расчёта переходной функции необходимо приблизительно оценить время окончания переходного процесса:
t![]()
![]() (
3
(
3
![]() 4 ) Т +
= ( 3
4 ) * 190 + 90
4 ) Т +
= ( 3
4 ) * 190 + 90
![]() 675 с.
675 с.
Исходя из этого, можно выбрать количество точек графика N=15 и шаг расчёта
t = t / N = 675 / 15 = 45c.
Весовую функцию
![]() определяем по дифференциальному
выражению:
определяем по дифференциальному
выражению:
=
![]() =
=
![]() ,
,
Результаты расчёта сведены в таблицу 1. По данным таблицы построен график переходной функции (рис. 4.) и весовая функция (рис.5.).
Таблица 1.
t [c.] |
0 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
h [ [%вл./(кг./c.)] |
0 |
0 |
1,48 |
2,64 |
3,56 |
4,29 |
4,86 |
5,31 |
10
[ |
0 |
3,68 |
2,91 |
2,29 |
1,81 |
1,43 |
1,13 |
0,89 |
t [c.] |
405 |
450 |
495 |
540 |
585 |
630 |
675 |
720 |
h [%вл./(кг./с.)] |
5,67 |
5,95 |
6,17 |
6,34 |
6,48 |
6,59 |
6,68 |
6,75 |
10 (t) [ C/c.] |
0,70 |
0,55 |
0,44 |
0,34 |
0,27 |
0,21 |
0,17 |
0,13 |
Характеристики обьекта:
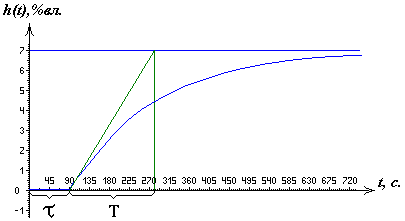
Рис. 4. Переходная функция объекта.
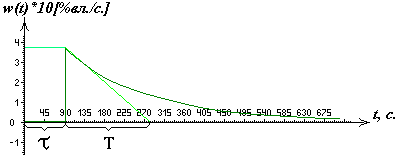
Рис. 5. Весовая функция объекта.
Выражения частотных характеристик объекта по каналу возмущения могут
быть получены из выражения частотной передаточной функции:
W
(j
)
= K
*e![]() /(1+jw
)
= A(
)*e
/(1+jw
)
= A(
)*e![]() ,
,
где А(
)
= |W
(j
)|
= |K
|/![]() = | 7 |/
= | 7 |/![]() ,
- АЧХ,
,
- АЧХ,
![]() (
)
= -
(
)
= -
![]() - arctg
T
= - 90
- arctg
190
.
- ФЧХ.
- arctg
T
= - 90
- arctg
190
.
- ФЧХ.
Частота , определяющая полосу частот пропускания объекта:
=
1/Т = 1/190 = 0,00526с![]() .
.
Частотные характеристики будем строить на диапазоне частот
от 0 до 50 = 50 * 0,00526 = 0,263 с .
АЧХ покажет, как пропустит объект сигналы управления различной частоты
(по отношению амплитуд выходного и входного сигналов).
Результаты расчёта сведены в Таблицу 2. По данным таблицы построен график
АЧХ (рис.6.), и график ФЧХ (рис.7.).
Таблица 2.