



МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
“КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ”
Кафедра прикладної гідроаеромеханіки і механотроніки
ГІДРОПРИВІД ФРЕЗЕРНОГО ВЕРСТАТА
МА41.В515. КППП
КУРСОВА РОБОТА
за курсом «Проектування об’ємних гідроприводів»
Керівник: Доц. каф. ПГ і М В.К. Буслов «Допущений до захисту» ___________________2009р. Захищений з оцінкою ____________________ Підпис
|
Виконавець ст. гp. Зал. книжка №
_________________ особистий підпис |
НТУУ «КПІ» 2009
 ЗМІСТ
ЗМІСТ
ВСТУП………………………………………………………………................2
1. ПОЧАТКОВІ ДАНІ………………………………………………...............3
2. ПРИНЦМПОВА ПНЕВМАТИЧНА СХЕМА…………………………….5
3. ОПИС РОБОТИПНЕВМАТИЧНОЇ СХЕМИ ПРИВОДУ………….……6
4. СТАТИЧНИЙ РОЗРАХУНОК ОСНОВНОГО ПРИВОДУ……………...7
4.1. Вибір трубопроводів і пневмоапаратури……………………………9
4.2. Розрахунок і вибір пружини стискання……………………………..13
5. ДИНАМІЧНИЙ РОЗРАХУНОК ОСНОВНОГО ПРИВОДУ………….....16
5.1. Знаходження пропускної здатності пневмоліній…………………....18
5.1.1. Знаходження пропускної здатності напірної пневмоліній…….18
5.2. Врахування об’ємів трубопроводів при динамічному розрахунку…22
5.2.1. Врахування об’ємів трубопроводів при динамічному розрахунку напірної пневмолінії………………………………22
5.3. Визначення часу підготовчого періоду……………………………..24
5.4. Визначення часу руху………………………………………………...27
5.5. Визначення часу заключного періоду……………………………….27
5.6. Визначення часу прямого ходу………………………………………28
5.7. Діаграма роботи пневмоциліндра двосторонньої дії……………….28
ЛІТЕРАТУРА
 ВСТУП
ВСТУП
Пневматичні приводи отримали широке використання при автоматизації виробничих процесів у загальному машинобудівництві та станко будівництві. Пневмоприлади використовують у якості приводів затискних та транспортуючих механізмів, для дистанційного керування та регулювання, при автоматизацій машин та приладів працюючих у різних умовах. Пневмосистеми розповсюджені у автомобільній промисловості, у будівництві літаків та інше , де вони використовуються для автоматизації зкладальних робіт.
Перевагою пневмоприладів порівняно з електричними виконавчими приладами є можливість здійснення поступового руху без будь-яких передаточних механізмів. Через це вони (разом з гідравлічними) знайшли велике застосування в тих випадках, коли потрібно виконати зворотньо-поступовий рух.
У порівнянні з гідравлічними пневматичні приводи мають такі переваги: їх виконавчі пристрої мають більшу швидкість спрацювання та низьку вартість, зворотні лінії значно коротше, тому що повітря може бути видалене в атмосферу з любого місця системи, безліч запасу повітря в якості робочого тіла. Але пневмоприводи забезпечують, порівняно з гідравлічними, менше зусилля.
Ефективна робота пневмоприводу в багатьох випадках залежить від правильного вибору його параметрів та співвідношення динамічних характеристик встановленим вимогам. Результатом взаємодії стислого повітря із твердими ланками у виконавчих приладах є зміна як пневматичних величин (тиску, температури та густини повітря), так і кінематичних (переміщення, швидкості та прискорення твердих ланок).
1. Початкові дані
Варіант В-515.
Пневмосистема,
яка складається з трьох приводів
розташована, як показано на рис.1 та
працює за наступним циклом:
![]() .
.
Вид керування: путьове, крім ходу вперед приводу 1, що контролюється по тиску.

Данні для розрахунку пневмоциліндра (Ц1) основного приводу наступні:
рм=0,6 МПа;
s=0,08 м ;
m1=5 кг;
P2=2,4 кН;
P0=0,2 кН;
V0/F×s = 0,015;
lT1=8 м;
lT2=0,6м;
tоч =0,5 с,
де рм - абсолютний тиск повітря, що підводиться, s-довжина робочого ходу приводу, m1 - маса рухомих частин приводу (крім вантажу, що переміщується), P2 - технологічне зусилля (корисне навантаження, P0 - зусилля попереднього підтиску зворотної пружини, V0/F×s - відносна величина шкідливого обсягу робочої порожнини власне пневмоциліндра без врахування об’єму пневмолінії, що зв’язує порожнину з пневморозподільником, lT1 - довжина трубопроводу від пневморозподільника до точки підводу живлення з магістралі стиснутого повітря, lT2 - довжина трубопроводу від розподільника основного приводу до його робочої порожнини, tоч - очікуваний час спрацювання основного приводу.
 2.
Принципова пневматична схема приводу
2.
Принципова пневматична схема приводу
Виходячи з завдання на курсову роботу була розроблена принципова схема пневматичної системи яка робить в автоматичному режимі за заданим циклом .
В якості датчиків станів в пневмосистемі використані шляхові пневмоклапани. Перший привод керується шляховим пневмоклапаном та клапаном послідовності .
Виконавчі приводи зображені в їх вихідному положенні у відповідності із завданням на КР. Для безпосереднього управління приводами використані пневморозподільники з двостороннім пневмоуправлінням. Їх особливістю є механічне «запам’ятовування» переключеного положення розподільного елементу.
Кількість пневморозподілювачів у схемі відповідає числу виконуючих приводів. Для кожного пневморозподілювача на схемі виконується підвід живлення, вихід в атмосферу і лінії зв’язку з порожнинами приводу. Відповідно до виду управління, вказаному у завданні, в схемі встановлюються датчики станів, що контролюють роботу виконавчих приводів і подають вхідні сигнали управління в логічну частину пневмосистеми. Управління в системі (крім ходу вперед основного приводу) шляхове, тому за датчики станів використовуються шляхові пневмоклапани, які переключаються під механічним впливом рухомих елементів приводу в їх крайніх положеннях. На схемі це умовно представляється у вигляді кулачків, що закріплені на штоках пневмоциліндрів, і пневмоклапанів, встановлених на шляху їх руху в їх крайніх положеннях. Для основного приводу використовується контроль по тиску, який здійснюється за допомогою клапана послідовності, який в підключається до штокової порожнини приводу, де контролюється тиск.
3. Опис роботи пневматичної схеми приводу
Розроблена схема пневматичної системи представлена рис.2.
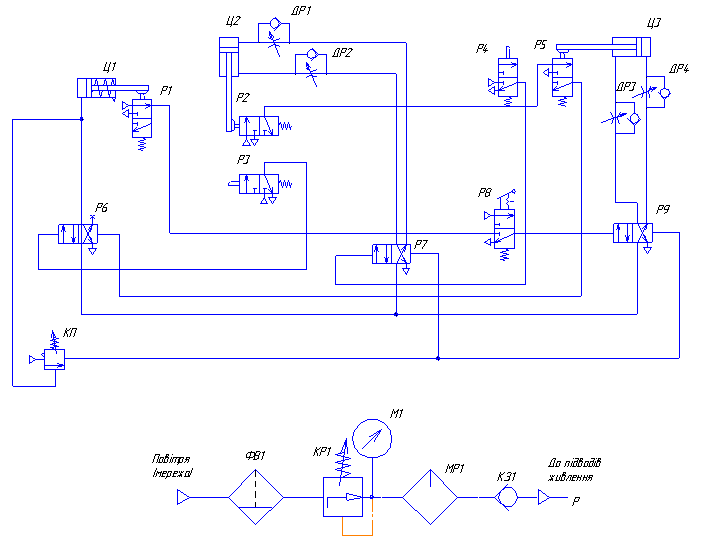
Рис.2. Пневматична схема
Поршні пневмоциліндрів знаходяться у вихідному положенні. Кулачки, що встановлені на їх штоках, впливають на пневмоклапани Р1, Р2 і Р4, на виходах яких утворюються командні сигнали.
 Робота
пневмосистеми починається з переключення
розподільника Р8 (пусковий клапан) в
ліве положення. Розподільник Р8 відповідає
команді “Пуск”. Він також є пневмоклапаном,
який виконує переключення між одиничним
та тривалим циклом. Якщо Р8 переключений
вліво, то виконується тривалий цикл.
Місцем установки пускового клапану є
пневмолінія, по якій передається перша
в циклі команда.
Робота
пневмосистеми починається з переключення
розподільника Р8 (пусковий клапан) в
ліве положення. Розподільник Р8 відповідає
команді “Пуск”. Він також є пневмоклапаном,
який виконує переключення між одиничним
та тривалим циклом. Якщо Р8 переключений
вліво, то виконується тривалий цикл.
Місцем установки пускового клапану є
пневмолінія, по якій передається перша
в циклі команда.