

3.3. Динамическая модель, её параметры
Динамическая модель представляет собой однозвенный механизм, закон движения которого совпадает с законом движения начального звена реального механизма.
Построение
одномассовой динамической модели
сводится к определению параметров
динамической модели, которые называют
приведенными параметрами механизма –
моментом инерции
 механизма,
приведенным к оси вращения входного
звена, и вращающим моментом
механизма,
приведенным к оси вращения входного
звена, и вращающим моментом
 механизма,
приведенным к оси вращения начального
звена.
механизма,
приведенным к оси вращения начального
звена.
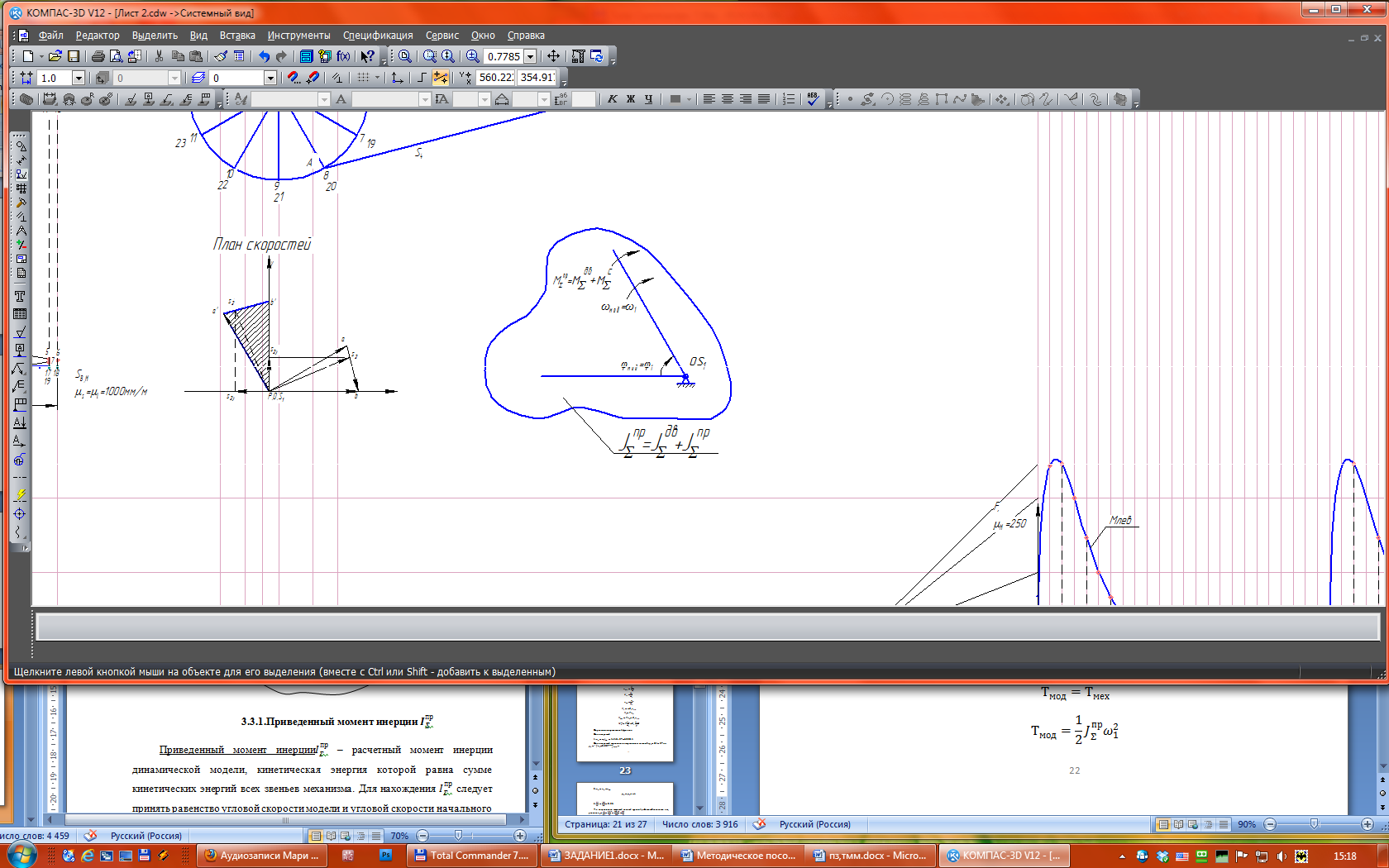
Рис. 3.3. Динамическая модель и её параметры
3.3.1. Приведенный момент инерции
Приведенный
момент инерции
– расчетный момент инерции динамической
модели, кинетическая энергия которой
равна сумме кинетических энергий всех
звеньев механизма. Для нахождения
 необходимо принять равенство угловой
скорости модели и угловой скорости
необходимо принять равенство угловой
скорости модели и угловой скорости
 начального звена реального механизма.
начального звена реального механизма.
Момент
инерции:
;




n - число цилиндров, работающих одинаково.


Первая группа звеньев- постоянная величина


Вторая группа звеньев - переменная величина
 ;
;

Передаточные
функции скорости


Передаточное
отношение угловых скоростей второго
звена
 и
первого
и
первого


передаточные
функции скоростей


3.3.2.
Приведенный момент сил
 TA \l "3.3.2.
Приведенный момент сил
"
\s "3.3.2. Приведенный момент сил
,𝑴-𝜮-пр." \c 1
TA \l "3.3.2.
Приведенный момент сил
"
\s "3.3.2. Приведенный момент сил
,𝑴-𝜮-пр." \c 1

Приведенный момент сил - расчетный момент сил динамической модели, которая развивает мощность, равную сумме мощностей всех звеньев механизма.
В
основе метода приведения сил лежит
равенство элементарных работ или
мгновенных мощностей, с одной стороны
сил и моментов, приложенных к реальному
механизму ( ),
а с другой – от приведенного момента,
действующего на динамическую модель
(
),
а с другой – от приведенного момента,
действующего на динамическую модель
( ).
).
Приведенный
момент сил
 определим
из равенства:
определим
из равенства:
 ;
;
 -
момент сил сопротивления
-
момент сил сопротивления
 ;
- движущий момент
;
- движущий момент
 ;
;
 ;
;






 – вес
шатуна;
– вес
шатуна;
 – вес поршня;
– вес поршня;
3.4. Определение передаточной функции
Для определения передаточных функций необходим план скоростей.
3.4.1. Построение плана скоростей
1.

Т.к.
 -
величина малая, то
-
величина малая, то

План скоростей строиться в вынужденном масштабе. Принимаем


2.


3.
Для построения плана скоростей на
механизме, полученный план скоростей
поворачиваем на 90о
в сторону, противоположную направлению
 .
.
Т.к
в определении скоростей в данной
курсовой работе необходимости нет,
учитывая что
1.Определим
передаточные функции

Т.е
для того чтобы определить передаточную
функцию
необходимо
с плана скоростей в вынужденном масштабе
замерить отрезок PB,
перевести
его через масштаб построения
 (результаты построения сведены в таблицу)
(результаты построения сведены в таблицу)
2.Определение передаточной функции

Найденную величину переводим через масштаб
3.Определение
передаточной функции

Для того чтобы найти на повернутом плане скоростей необходима для каждого положения s2 спроецируем на ось x. Полученное значение перевести через масштаб.
4.
Значения передаточных функций для левого поршня сведены в
таблицу 1 . Вводятся 2 дополнительных положения 2’и 9’, в котором vqb имеет max значение, используется при построении I2
Табл. 1
φ |
Pb,м |
vqb |
Ab |
As2 |
Ps2 |
Vqs2 |
Ps2y |
Vqs2y |
U21 |
||||||
|
0 |
0 |
35 |
|
|
|
|
|
|
||||||
1 |
21,78 |
0,02178 |
30,61 |
8,2647 |
28,94 |
0,02894 |
22,13 |
0,02213 |
-0,24488 |
||||||
2 |
34,68 |
0,03468 |
18,03 |
4,8681 |
33,98 |
0,03398 |
12,7 |
0,0127 |
-0,14424 |
||||||
2' |
36,35 |
0,03635 |
9,4 |
2,538 |
35,12 |
0,03512 |
6,662 |
0,006662 |
-0,0752 |
||||||
3 |
35 |
0,035 |
0 |
0 |
35 |
0,035 |
0 |
0 |
0 |
||||||
4 |
25,93 |
0,02593 |
18,03 |
4,8681 |
31,81 |
0,03181 |
-12,7 |
-0,0127 |
0,14424 |
||||||
5 |
13,21 |
0,01321 |
30,61 |
8,2647 |
27,51 |
0,02751 |
-22,13 |
-0,02213 |
0,24488 |
||||||
6 |
0 |
0 |
35 |
9,45 |
25,5 |
0,0255 |
-25,5 |
-0,0255 |
0,28 |
||||||
7 |
-13,21 |
-0,01321 |
30,61 |
8,2647 |
27,51 |
0,02751 |
-22,13 |
-0,02213 |
0,24488 |
||||||
8 |
-25,93 |
-0,02593 |
18,03 |
4,8681 |
31,81 |
0,03181 |
-12,7 |
-0,0127 |
0,14424 |
||||||
9 |
-35 |
-0,035 |
0 |
0 |
35 |
0,035 |
0 |
0 |
0 |
||||||
9' |
-36,35 |
-0,03635 |
9,4 |
2,538 |
35,12 |
0,03512 |
6,662 |
0,006662 |
-0,0752 |
||||||
10 |
-34,68 |
-0,03468 |
18,03 |
4,8681 |
33,98 |
0,03398 |
12,7 |
0,0127 |
-0,14424 |
||||||
11 |
-21,78 |
-0,02178 |
30,61 |
8,2647 |
28,94 |
0,02894 |
22,13 |
0,02213 |
-0,24488 |
||||||
12 |
0 |
0 |
35 |
9,45 |
25,5 |
0,0255 |
25,5 |
0,0255 |
-0,28 |
Суммарный приведенный момент инерции представляет собой сумму приведенных моментов инерции всех подвижных звеньев.
 ,
где
,
где
 –
момент
движущий суммарный от внешних сил,
–
момент
движущий суммарный от внешних сил,
 – момент
суммарный от сил полезного сопротивления.
– момент
суммарный от сил полезного сопротивления.

 –
момент
от силы, действующей на первый цилиндр;
–
момент
от силы, действующей на первый цилиндр;
 –
момент
от силы, действующей на второй цилиндр;
–
момент
от силы, действующей на второй цилиндр;
Vb = Vbx ,т.к. Vby=0;
Момент вычисляется по следующей формуле:
 Аналогично
находятся значения
Аналогично
находятся значения

Результаты вычисления , и его составляющих сведены в таблицу 2.
Выбран
масштаб
 мм/Н*м
мм/Н*м