

24. Мост для измерения индуктивности и добротности катушки
Добротность – отношение реактивного сопротивления к активному Q=wLx/Rx
Мосты для указанных физических величин могут быть построены с применением либо образцовой индуктивности, либо образцовой емкости. При использовании образцовой индуктивности в измеряемое плечо моста включается испытуемая катушка с индуктивностью Lx, обладающая реактивным сопротивлением Rx, а в соседнее плечо – образцовая катушка с инд. L0 и сопротивлением R0. В зависимости от соотношения между сопротивлениями Rx и R0 дополнительное переменное сопротивлениеR подключается послед. или параллельно с образцовой катушкой индуктивности.
R1
П =1;
Z1*Z4 = Z2*Z3;
Z1 = Rx+ jwLx;
Z2=R1;
Z3=R+R0+jwL0;
Z4=R2;
(Rx+ jwLx)*R2 = (R+R0+jwL0)*R1;
Lx= L0*R/R2;
Rx= ((R+R0)*R1)/R2;
П=2;
Lx=L0*R1/R2;
Rx= R0*R1/R2-R;
Z1=Lx+jwLx;
Z2=R1;
Z3=R2;
Z4= Ro/(1+jwC0);
Lx= C0R1R2;
Rx=R1*R2/R0;
25 Компенсаторы постоянного тока.
Принцип действия компенсаторов основан на взаимном уравновешивании (компенсации) измеряемой ЭДС и известного падения напряжения на резисторах. В них используется «0»ой метод сравнения
Они измеряют ЭДС, U, I, R
Пока источник не включён у него ЭДС, при включённом за счёт Rвнутр он создаёт напряжение.
К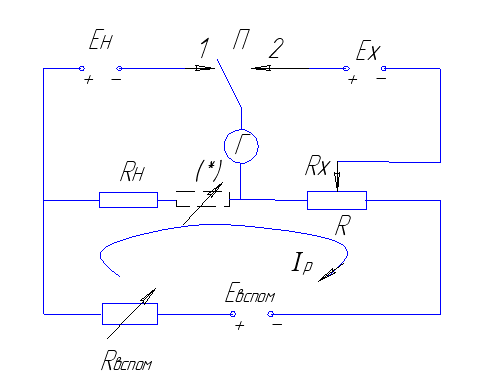 омпенсаторы
обеспечивают наибольшую точность
измерения этих величин.
омпенсаторы
обеспечивают наибольшую точность
измерения этих величин.
Погрешность совр. Компенсаторов не больше 0,02%
Eх-измеряемое ЭДС
Ен-эталонное ЭДС
Евсп.-Вспомогательное ЭДС
Rвсп-вспом. Реостат
Ip-рабочий ток
(*)-добавка
для регулирования тока
Ip
в Ен=Ip*Rн
(Ен=Ен(t![]() ))
))
Ен - нормальный эл-т, у него очень стабильное и точное ЭДС (+поправки на t”)
Ен1=Ен20 c-0,00004(t -20 )-0,000001(t -20 )^2
Ен20 c=1,0185 В (0б001%)
В работе с компенсатором 2 этапа:
Установка рабочего тока
«П» в положение «1»-на норм эл-т. Изменяя соротивление, добиваются Ен=Iраб*Rн
Переключить «П» в пол. «2» добиваемся Ен=Ip*Rx
26 Компенсаторы переменного тока.
Принцип действия в уравновешивании измеряемой ЭДС и известного парения напряжения на резисторах.
Уравновешивание по величине и по фазе.
КПеремТ по точности уступает КПостТ, т.к. не существует источника эталонного ЭДС переем тока.
В зависимости от того, как происходит уравновешивание по величине и по фазе и в каких корд. Получается отсчёт, КперТ делятся на 2 группы.
Полярнокоординатные компенсаторы.
Прямоугольнокоординатные компенсаторы.
Вектор на плоскости в пол. Корд-ах определяется длиной вектора и углом от поляр. оси P
Схема полярнокоординатного компенсатора.
ИР
Ех
Ир-индикатор равновесия


 Фр-фазорегулятор
Фр-фазорегулятор
Ех-измеряемое ЭДС
Rх










R
A
Цепь рабочего
тока


Rвсп



ФР

3х фазная цепь
Установка рабочего тока. Раб ток устанавливается по А с ном. R вспом. Эл-дин A- самые точные на перем токе.
Изменяя положение движков реостатов R. добиваются min-ого отклонения на ИР. Изменяя положение ротора от-но стартёра ФР добиваются «0»-ого отклонения
Стартёр питается от сети, на роторе индуцируется ЭДС от стартёра (имеет свои обмотки) Поворачивая ротор, не меняем величину, но меняем угол напряжения.
Положение вектора на плоскости прямоугольных координат, определяется 2мя проекциями на ось
Схема


Ri=Rii “0” в серединах!
Ток I1 создаёт поток Ф по закону эл-магн. Индукции на зажимах вторичной обмотки катцшки взаимной индуктивности возникает ЭДС

Если реактивная составляющая сопр-ия цепи II <<< активного сопр. Цепи II, то I2 перпендикулярно I1 и I2=(w*M*I1)/R2 (*)
Установка раб тока производится по А с пом Rвспом. Изменяя положение движков реостатов Ri и Rii добиваются «0»-ого отклонения ИР
Ток I2 в соотв (*) зависит от частоты питания I1, т.к. частота не постоянна, то можно добавить частотомер в цепь и регулировка идёт по Rf