

Передаточное отношения для таких механизмов равно
i12(h) =(1–h)/ (2–h) =(n1–nh)/ (n2–nh), (2.16)
где 1, 2, 3, h – угловые скорости центральных колес, сателлита и водила. Вышеприведенная формула носит название формулы Виллиса для дифференциалов.
Классификационные формулы планетарных передач составляют с помощью букв латинского алфавита. Заглавными буквами обозначают типы механизмов, а строчными буквами обозначают звенья, образующие эти механизмы. Особенности структуры передачи уточняют индексами. Нижние индексы относятся к основным звеньям. Первый из них указывает звено, передающее наибольший крутящий момент. Верхний индекс указывает какое звено не вращается.
Планетарные зубчатые передачи классифицируют по сходным конструктивно- функциональным признакам механизмов.
Планетарный механизм 2k – h содержит в качестве основных звеньев два центральных колеса k и водило h. Передачи с этим механизмом имеют обозначения:
А – передача, механизм которой содержит одновенцовый сателлит, центральное колесо а с внешними зубьями и центральное колесо b с внутренними зубьями (рисунок 2.8, а – передача Аbha с остановленным центральным внешним колесом b, рисунок 2.8,б – передача Ааhb c остановленным центральным внутренним колесом a, рисунок 2.8,в – передача Аhba с остановленным водилом h);
В – передача, механизм которой содержит двухвенцовый сателлит, центральное колесо а с внешними зубьями и центральное колесо b с зубьями на внутренней поверхности обода (рисунок 2.8, г – передача Вbha c остановленным внешним центральным колесом b);
С – передача, механизм которой содержит двухвенцовый сателлит и центральные колеса b и е с внутренними зубьями (рисунок 2.8,д – Сbeh c остановленным внешним центральным колесом b);
Е – передача, механизм которой содержит одновенцовый сателлит и конические зубчатые колеса (рисунок 2.8, е – передача Е).
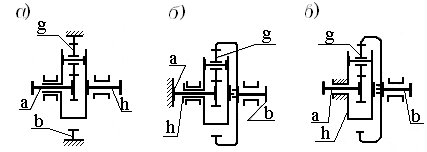
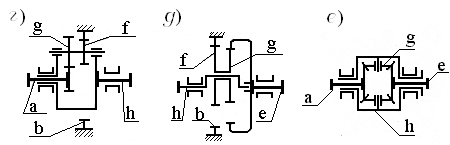
Рисунок 2.8– Схемы передач с механизмом 2k –h
Механизм 3k (рисунок 2.9) в качестве основных звеньев имеет три центральных колеса. В этом случае водило не воспринимает нагрузку от внешних моментов, а только поддерживает сателлиты.
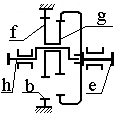
Рисунок 2.9 – Схема передачи с механизмом 3k
Замкнутые передачи (передачи – ) содержат дифференциал, основные звенья которого обозначают буквами , , . На рисунке 2.10,а показан механизм, у которого звено вращается с одним из выходных валов, а два других основных звена и
связаны с другим выходным валом . На рисунке 2.10,б показан механизм основное звено которого соединено с выходным валом (передачей – ), а механизм А (передача – ) выполняет функции тихоходной ступени.
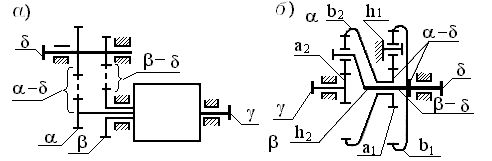
Рисунок 2.10 – Схемы передач с механизмом -
 В
обозначении последовательно соединенных
механизмов применяют знак лигатуры
, который указывает пару звеньев
соседних ступеней, соединенных друг с
другом . Звеньям тихоходной ступени
присваивают индекс 1, а звеньям быстроходной
ступени – индекс 2 (Ab1h1a1Ab2h2a2,
Ab1h1a1Ah2b2a2).
В
обозначении последовательно соединенных
механизмов применяют знак лигатуры
, который указывает пару звеньев
соседних ступеней, соединенных друг с
другом . Звеньям тихоходной ступени
присваивают индекс 1, а звеньям быстроходной
ступени – индекс 2 (Ab1h1a1Ab2h2a2,
Ab1h1a1Ah2b2a2).


На рисунке 2.11 изображены схемы передач, составленных из двух механизмов А.

Рисунок 2.11 – Схемы двухступенчатых планетарных передач:
а )
передача Аb1h1a1Аb2h2a2;
б)
передача Аb1h1a1Аh2b2a2;
)
передача Аb1h1a1Аb2h2a2;
б)
передача Аb1h1a1Аh2b2a2;
в) передача (АА)h1(b1h2)a2; г) передача (АА)h1(b1b2)a2
При расчете зубчатым колесам помимо принятых буквенных обозначений присваются индексы 1 и 2 соответственно меньшему и большему элементу сцепляющейся пары.
Одноступенчатые цилиндрические и конические передачи используют обычно при передаточном отношении i7. При больших значениях i целесообразно применять передачи со скрещивающимися осями и многоступенчатые передачи различной комбинации как с подвижными, так и с неподвижными осями.