

2. Механизмы передачи вращательного движения
2.1. Синтез механизмов передачи вращательного движения
Синтез механических передач, вращательного движения состоит в определении геометрических форм и размеров контактирующих звеньев передачи, обеспечивающих требуемый характер относительного движения.
Параметры механизма устанавливают по целевой функции, основанной на передаточной функции, которая отражает связь входных и выходных кинематических характеристик. Для механизмов с вращающимися звеньями кинематическая передаточная функция отождествляется с передаточным отношением.
Реализация передаточной функции осуществляется сопряженными поверхностями. Для вращающихся элементов передачи, когда взаимодействие происходит по высшей кинематической паре (линии или точке), контактирующие поверхности будут сопряжены, если вектор скорости относительного движения в любой точке контакта находится в плоскости, касательной к ним, а общая нормаль перпендикулярна вектору скорости.
Геометрические места точек на плоскостях пары звеньев, приходящих в соприкосновение по линии центров называют центроидами относительного движения. Перекатывание центроид без скольжения друг относительно друга воспроизводит передаточную функцию механизма.
В случае, когда общая нормаль при вращении пары звеньев проходит через одну и ту же точку линии центров, отношение угловых скоростей будет величиной постоянной, а центроиды в этом случае называют начальными окружностями. Точку касания начальных окружностей элементов передачи называют полюсом. Сопряженные профили должны располагаться относительно центроид так, чтобы в любой точке контакта нормаль проходила через полюс зацепления.
На рисунке 2.1 показано соотношение скоростей вращающихся звеньев, сопряженных по высшей кинематической паре.
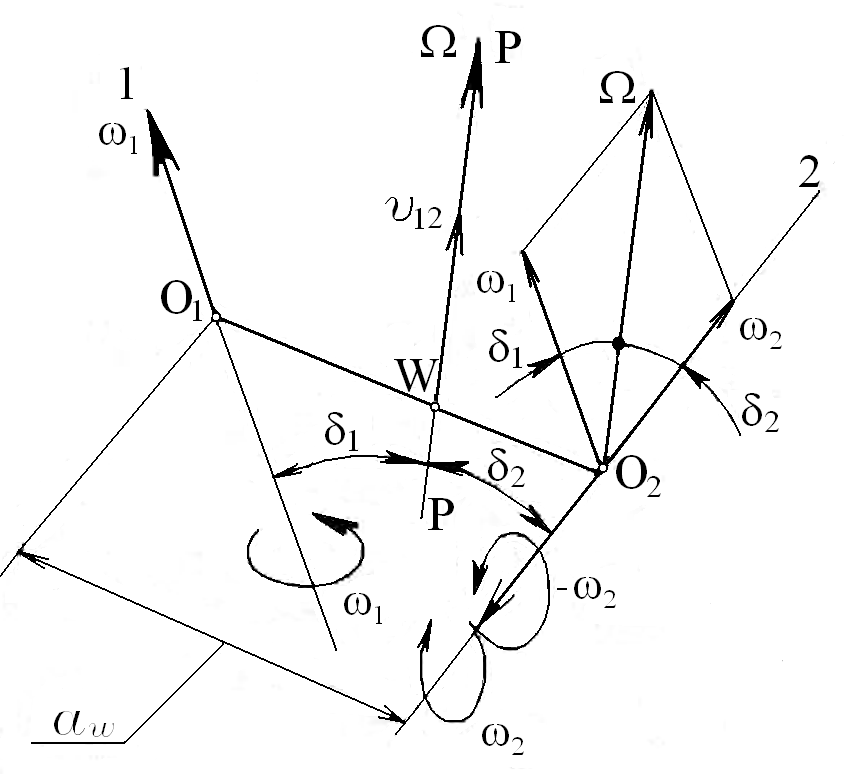
Рисунок 2.1 – Cоотношения скоростей вращающихся
звеньев, сопряженных по высшей кинематической паре
В случае передачи движения звеньями, оси которых скрещиваются, имеет место движение c относительной угловой скоростью с одновременным перемещением контактирующих элементов вдоль мгновенной оси Р–Р со скоростью v12, т.е. происходит винтовое движение с параметром h
h=v12/. (2.1)
Мгновенная ось вращения Р–Р проходит через мгновенный центр вращения W, расположенный на межосевой линии О1– О2.
На основании теоремы о соотношении скоростей в высшей кинематической паре, нормаль в точке контакта двух звеньев, совершающих вращательное движение с угловыми скоростями 1 и 2 , делит межосевое расстояние О1О2 на отрезки О1W и О2W, величины которых обратно пропорциональны угловым скоростям этих звеньев.
1/ 2=O2W/ O1W . (2.2)
Величина и
направление вектора относительной
угловой скорости
![]() устанавливается на основании теоремы
сложения угловых скоростей
устанавливается на основании теоремы
сложения угловых скоростей
=1+2 . (2.3)
Линейная скорость поступательного перемещения одного звена относительно другого при винтовом движении отождествляется со скоростью скольжения vск
vск=v12=О1О212sin / , (2.4)
где – угол скрещивания между осями вращения сопрягаемых пары звеньев.
Когда скорость скольжения равна нулю, относительное движение будет только вращательным с относительной угловой скоростью .
Положение мгновенной оси относительного движения устанавливается на основании следующего соотношения
О1W/ О2W= tg1/ tg2 , (2.5)
где 1 и 2 – углы, образованные осями пары звеньев с мгновенной осью относительного движения.
Передаточное отношение между двумя вращающимися сопряженными звеньями устанавливается зависимостью
i12=1/ 2=О2Wcos2/(О1Wcos1), (2.6)
где О1W и О2W – радиусы начальных окружностей центроид пары звеньев.
Передаточное отношение будет величиной постоянной в случае, когда угловые скорости 1 и 2 и углы 1 и 2 неизменны во времени.
Поверхности, которые описывает мгновенная ось относительного движения звеньев передачи в системе координат каждого из них называют аксоидными.
В случае, когда оси звеньев перекрещиваются в пространстве, аксоидами в относительном движении будут однополостные гиперболоиды вращения (рисунок 2.2).
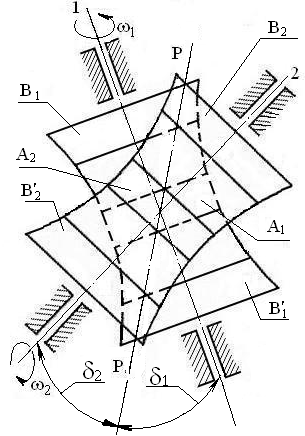
Рисунок 2.2 – Аксоиды звеньев со скрещивающимися осями
Нормаль к поверхности гиперболоидов пройдет через их оси вращения, и движение в этом случае можно передать только силами трения, прижимая звенья. Чтобы избежать этого для передачи движения звеньям придают форму, при которой нормаль к поверхности не проходит через их оси вращения, а касательная плоскость проходит через векторы угловой и линейной скоростей. При этом образуются новые гиперболоиды, касание которых с аксоидными гиперболоидами происходит в точке.
При точечном касании в качестве начальных поверхностей можно принимать не только гиперболоиды вращения, но и более простые по своей форме поверхности.
В частности, это могут быть круглые цилиндры, построенные у горловин гиперболоидов и касающиеся друг друга в точке, лежащей на линии кратчайшего расстояния между осями колес (А1 и А2 на рисунке 2.2) и образующие винтовую передачу, или конусы с несовпадающими вершинами, имеющие также точечный контакт (В1 и В2, В1 и В2 на рисунке 2.2) и образующие гипоидную передачу.
Замена одного из цилиндров с винтовой линией на цилиндрическое колесо позволяет получить червячную передачу.
Распространение получили червячные передачи, в которых оси элементов скрещиваются под углом 90 (рисунок 2.3).
Цилиндр с винтовой линией принято называть червяком, а сопряженный с ним цилиндр, на котором расположены зубья с наклоном – червячным колесом.
Угол подъема линии витка червяка влияет на габариты и коэффициент полезного действия червячной передачи.

Рисунок 2.3 – Передача червячная: r1 , r2 – радиусы начальных окружностей соответственно 1-го и 2-го звеньев; – угол подъема линии витка червяка
В случае, когда оси звеньев пересекаются, ось относительного вращения расположена в плоскости осей звеньев, проходит через точку пересечения этих осей и делит угол между ними на углы, синусы которых обратно пропорциональны угловым скоростям. Аксоидные поверхности представляют собой конусы с общей вершиной: с внешним касасанием (рисунок 2.4,а) или с внутренним касанием(рисунок 2.4,б) .
Относительное движение воспроизводится перекатыванием этих поверхностей без скольжения.
Осью относительного вращения является общая образующая аксоидных конусов по которой они соприкасаются. Эти аксоидные поверхности можно принять в качестве начальных конусов.

Рисунок 2.4 – Передача коническая:
а) – внешнее касание звеньев; б) – внутреннее касание звеньев.
1, 2, r1, r2 – углы конусности и радиусы внешних окружностей конусов соответственно 1-го и 2-го звеньев
В случае, когда оси звеньев параллельны друг другу, аксоидными поверхностями будут цилиндры с внешним касанием (рисунок 2.5,а) или с внутренним касанием (рисунок 2.5,б). Относительное движение воспроизводится перекатыванием этих поверхностей без скольжения. Эти аксоиды можно принять в качестве начальных поверхностей элементов цилиндрической передачи.

Рисунок 2.5 – Передача цилиндрическая:
а) – внешнее касание звеньев; б) – внутреннее касание звеньев.
r1, r2 – радиусы начальных окружностей соответственно 1-го и 2-го звеньев
Передаточные отношения между элементами механических передач вращения устанавливаются соотношениями угловых скоростей звеньев:
- для цилиндрических передач
i12 = 1/ 2= r2/ r1; (2.7)
- для конических передач
i12 = 1/ 2= r2/ r1; (2.8)
- для конических ортогональных передач (=1+ 2=90)
i12 = 1/ 2= r2/ r1=сtg1= tg2; (2.9)
- для передач, оси которых скрещиваются в пространстве
i12 = 1/ 2= r2/(r1tg ) . (2.10)
Знак передаточного отношения зависит от направления угловых скоростей, т.е. когда направление вращения сопрягаемых элементов противоположны друг другу устанавливается знак «минус» (внешнее зацепление пары колес), а при одинаковой направленности – знак «плюс» (внутренне зацепление пары колес).
Механизмы могут быть образованы колесами с неподвижными и подвижными осями. Механизмы с колесами, которые вращаются вокруг осей не перемещающихся в пространстве называют рядовыми.
В зависимости от заданного общего передаточного отношения и выбранной схемы передачи могут быть одно-, двух- и многоступенчатые.
Для рядовых механизмов, состоящих из нескольких пар колес m общее передаточное отношение получают перемножением передаточных отношений каждой пары, взятых со своими знаками
i1n =1/ n=(–1)m( i12 )( i23 )… ( i(n-1)n ). (2.11)
Знак передаточного отношения при четном количестве внешних зацеплений положительный, при нечетном – отрицательный.
В случае, когда передача вращательного движения осуществляется зубчатыми колесами их начальные поверхности – это взаимно касающиеся поверхности, в любой точке касания которых можно провести общую касательную к линии зубьев, лежащих на этих поверхностях. Общая нормаль к зацепляющимся профилям зубьев в точке контакта всегда проходит на линии центров через одну и ту же точку, называемую полюсом зацепления. При этом вектор линейной относительной скорости колес направлен вдоль этой касательной или равен нулю.
Профили зубьев, удовлетворяющие этому условию, являются сопряженными и обеспечивают выполнение основного закона зацепления: для сохранения постоянства передаточного отношения зубчатого механизма необходимо, чтобы нормаль к соприкасающимся профилям зубьев в точке контакта всегда проходила на линии центров через одну и ту же точку, называемую полюсом зацепления, которая занимает неизменное положение. Основной закон зацепления сформулирован на основании теоремы о соотношении скоростей в высшей кинематической паре.
В передачах зацеплением передаточное отношение i отождествляется с передаточным числом u, которое представляет собой отношение числа зубьев одного колеса к числу зубьев другого. Дискретная величина передаточного числа не всегда совпадает с аналоговым значением передаточного отношения.
При понижении частоты вращения колес от входа к выходу передаточное число u12 -это отношение числа зубьев z2 большего колеса к числу зубьев z1 меньшего колеса
u12= z2/z1 =1/2 = i12 , (2.12)
где 1 и 2–откорректированные значения угловых скоростей звеньев 1 и 2 в соответствии с их геометрическими параметрами, установленными окончательным расчетом; i12– фактическое значение передаточного отношения пары колес.
Для червячных передач в качестве значения z1 принимают количество заходов (витков) на червяке, а количество зубьев на червячном колесе обозначают z2 .
Передачи с колесами, оси которых подвижны и перемещаются вокруг окружностей других колес, будучи с ними связанными, называются эпициклическими. Эпициклическая передача, в которой на отдельные звенья наложена дополнительная кинематическая связь называется планетарной (рисунок 2.6).
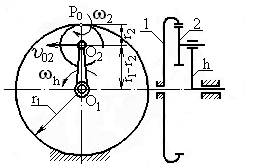
Рисунок 2.6 – Схема трехзвенного планетарного механизма:
1 – колесо центральное; 2 – сателлит; h– водило
Звено h входит во вращательные пары О1 со стойкой и О2 с зубчатым колесом 2 и вращается с угловой скоростью h. Звено 2 обегает центральное неподвижное коле-со 1, вращаясь с угловой скоростью 2 вокруг мгновенного центра вращения Р0. Звено 1 называют центральным колесом, звено 2 – сателлитом, звено h –водилом.
Механизмы, в которых хотя бы одно звено имеет подвижную ось называют сателлитными. Сателлитные механизмы с одной степенью подвижности являются планетарными. Передаточное отношение в таких передачах устанавливается по связи угловых скоростей 2 и h через линейную скорость vO2 точки O2, общей для колеса 2 (сателлита) и водила h
vO2=2r2= – h(r1 – r2), (2.13)
где r1 и r2 – радиусы центрального колеса и сателлита соответственно.
При условно неподвижном колесе 1 по принципу обращенного движения величина передаточного отношения от второго звена к водилу устанавливается по формуле
i2h(1) =2/h=(r2 – r1)/ r2=1– (r1/ r2)=1– i21(h), (2.14)
где i21(h) – передаточное отношение от второго колеса к первому при условно остановленном водиле h.
В планетарных механизмах с круглыми колесами сумма передаточных отношений при различных останавливаемых звеньях всегда равна единице
i2h(1) + i21(h)=1. (2.15)
Сателлитные механизмы с двумя и более степенями подвижности называют дифференциальными механизмами, (рисунок 2.7).
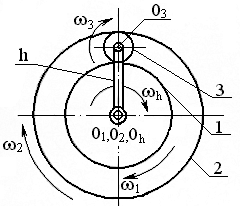
Рисунок 2.7 – Дифференциальный механизм с цилиндрическими колесами:1, 2 – колеса центральные; 3 – сателлит; h – водило