

4.9.1. Общие положения
Для
трансформирования энергии в трехфазных
системах используют либо группу из трех
однофазных трансформаторов, у которых
первичные и вторичные обмотки соединяются
звездой или треугольником, либо один
трехфазный трансформатор с общим
магнитопроводом.
Трехфазные
трансформаторы могут иметь различные
схемы соединения первичных и вторичных
обмоток. Все начала первичных обмоток
трансформатора обозначают большими
буквами: А, В, С; начала вторичных обмоток
- малыми буквами: а, Ь, с.
Концы обмоток
обозначаются соответственно: X, У, Z и х,
у, z.
Зажим выведенной нулевой точки
при соединении звездой обозначают
буквой О.
Наибольшее распространение
имеют соединения обмоток по схеме
"звезда" (Y) и "треугольник"
(),
причем первичные и вторичные обмотки
могут иметь как одинаковые, так и
различные схемы. Если при соединении
обмоток "звездой" нулевая точка
выводится, то такое соединение называют
"звезда c нулем" (Yо).
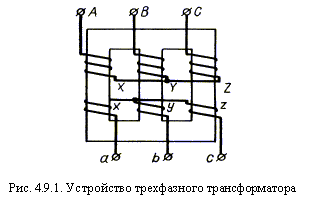
На рис. 4.9.1
приведен трехфазный трансформатор при
включении обмоток Y/Y.
ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ ТОКА И НАПРЯЖЕНИЯ
Эти трансформаторы применяются совместно с измерительными приборами для расширения их пределов измерения (рис. 4.12.4.1). Измерительный трансформатор напряжения представляет собой понижающий трансформатор с таким отношением витков w1/w2, чтобы при U1 = Uсети; U2 = 100 В. Во вторичную цепь включаются вольтметры, частотомеры, обмотки напряжения ваттметров, счетчиков и фазометров. Так как электрическое сопротивление этих приборов велико (порядка 1000 0м), то трансформаторы напряжения работают в режиме, близком к холостому ходу. Такой режим связан с большими магнитными потерями, а это, в свою очередь, приводит к увеличению размеров магнитопровода и устройству специального масляного охлаждения.
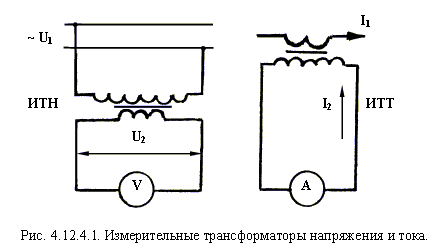
Измерительные трансформаторы тока (рис. 4.12.4.1) применяются для включения в сеть амперметров, обмоток тока ваттметров, счетчиков и фазометров. Первичная обмотка трансформатора тока выполняется из провода большого поперечного сечения и включается в цепь последовательно. Вторичная обмотка выполняется всегда на ток I2 = 5А.
Рабочий режим трансформатора тока близок к короткому замыканию, поэтому размеры магнитопровода у него значительно меньше, чем у трансформатора напряжения. Для определения напряжения или тока в цепи необходимо показания приборов умножить на коэффициент трансформации измерительных трансформаторов. В целях безопасности нельзя оставлять вторичную обмотку трансформатора тока разомкнутой, если первичная включена в сеть. В этом режиме напряжение U2 возрастает до нескольких тысяч вольт. Разновидностью измерительного трансформатора тока являются токоизмерительные клещи с разъемным магнитопроводом, где роль первичной обмотки выполняет сам провод, по которому течет измеряемый ток.
общие сведения и конструкция асинхронного двигателя
Понятие асинхронной машины связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора.
Буква "а" здесь играет как бы роль отрицания или нестрогого следования ротора за синхронно вращающимся магнитным полем статора.
Создателем этой простой по конструкции, но удобной и надежной в работе машины является русский инженер М.О. Доливо-Добровольский. Асинхронный двигатель, впервые разработанный в 1889 году, практически не подвергся серьезным изменениям до наших дней.
В основу конструкции асинхронного двигателя положено создание системы трехфазного переменного тока принадлежащее этому же автору.
Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле.
Основными конструктивными элементами асинхронного двигателя являются неподвижный статор и подвижный ротор (рис. 5.1.1). Статор и ротор разделены воздушным зазором от 0,1 мм до 1,5 мм. Пакет статора c целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали. На внутренней полости статора имеются пазы, в которые укладываются провода обмотки. Листы статора перед сборкой в пакет изолируют слоем лака или окалины, полученной при их отжиге.
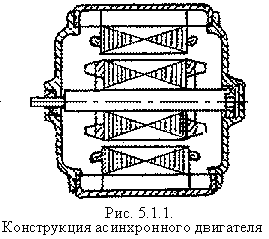
В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек - фаз, сдвинутых в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины.
В зависимости от типа обмотки роторы двигателей обычного исполнения делятся на короткозамкнутые и фазные.
Обмотка короткозамкнутого ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти стержни замыкаются кольцами. Соединения стержней с кольцами осуществляется пайкой или сваркой (рис. 5.1.2).
Чаще всего короткозамкнутую обмотку выполняют расплавленным, алюминием и литьем под давлением. При этом вместе со стержнями и кольцами отливаются и лопатки вентилятора.

Двигатели большой мощности имеют на роторе фазную обмотку. Конструкция ее аналогична обмотке статора. Концы этой обмотки выведены на контактные кольца. С помощью этих колец и токосъемных щеток к обмотке ротора подключают дополнительные сопротивления.
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ 3-х фазного
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу - Fэм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля.
Частота вращения ротора n2 будет всегда меньше синхронной частоты n1, т.е. ротор всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается с частотой n2 равной частоте вращающегося поля статора n1. В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может вращаться синхронно c полем статора. Разность между частотами поля статора n2 и ротора n1 называется частотой скольжения n.
![]() .
.
Отношение частоты скольжения к частоте поля называется скольжением:
![]() .*)
.*)
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение Sн обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
![]()
Обмотка ротора асинхронного двигателя электрически не связана с обмоткой статора. В этом отношении двигатель подобен трансформатору, в котором обмотка статора является первичной обмоткой, а обмотка ротора - вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора наводится неизменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя - потоком постоянным по величине, но вращающимся в пространстве. Эффект в том и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора двигателя вместе с ним вращается.
ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться, анализируя процессы, протекающие в асинхронном двигателе.
Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения n. Она же наводит в обмотке ротора ЭДС E2, частота которой f2 связана со скольжением S:
![]()
Учитывая, что f1=рn1/60, f2=рn1S/60.
Приняв величину номинального скольжения порядка 0,01-0,1, можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет 0,5-5 Гц (при f1=50 Гц).
МАГНИТНЫЕ ПОЛЯ И ЭДС АСИНХРОННОГО ДВИГАТЕЛЯ
При подключении обмотки статора к сети возникают токи I1, создающие вращающийся магнитный поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора. Это будет основной поток обмотки статора. Некоторая часть магнитного потока рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он cцепляется только с витками собственной обмотки.
Основной магнитный поток асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора со скоростью n1 и обмотку ротора со скоростью n2, наводя в них основные ЭДС:
![]() ;
;
![]()
где W1k1 и W2k2 - произведения чисел витков на обмоточные коэффициенты; Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2, которые, как в трансформаторе, могут быть выражены через соответствующие токи I1 и I2 и индуктивные сопротивления х1 и х2s.
![]() ;
;
![]()
где х1 и х2s - индуктивные сопротивления рассеяния обмоток статора и ротора.
Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые компенсируются соответствующими ЭДС Er1 и Еr2.
. СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
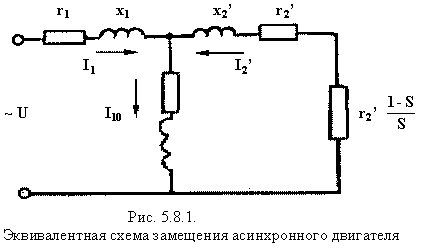
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения (рис. 5.8.1.). Таким образом, сложную магнитную цепь электрической машины можно заменить электрической схемой. Сопротивление r2'(1 - S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.
. ПОТЕРИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:
![]()
Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
![]()
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
![]()
Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2'=Рэм-Рэ2
Воспользовавшись ранее полученной формулой
![]()
запишем выражение полной механической мощности:
![]()
тогда
![]()
или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину механических Рмех и добавочных Рдоб потерь:
Р2=Р2’-(Рмех.+Рдоб.).
Таким образом:
Р2=Р1-SP,
где
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия есть отношение мощности на валу P2 к потребляемой мощности P1:
![]()
. УРАВНЕНИЕ ВРАЩАЮЩЕГО МОМЕНТА
Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины:
![]() ,
,
где w1=2pn1/60 - угловая частота вращения поля.
В свою очередь, n1=f160/Р, тогда
![]() .
.
Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим:
![]() ,
,
Отсюда следует, что момент двигателя пропорционален электрическим потерям в роторе. Подставим в последнюю формулу значение тока I2’:
![]() ,
,
получим
![]() ,
,
где U1 - фазное напряжение обмотки статора.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО