

4 Способ формирования пропорционально-интегрального закона
Способ реализуется в регуляторах с непрерывным выходным сигналом

Эта схема применяется для объектов с огромными запаздываниями: W2 — с меньшим запаздыванием, чем W1
![]()
![]()
Выводы:
1. Данная схема позволяет с заданной точностью реализовать пропорционально-интегральный закон регулирования.
2. Степень точности реализации зависит от величины КУС.
3. Органы настройки располагаются в формирующей обратной связи. Градуировочная характеристика КР — гиперболическая.
34) Способы формирования пропорционально-интегрально-дифференциального закона
1 Способ формирования пропорционально-интегрально -дифференциального закона
![]()
Выводы:
1. Данная схема реализует пропорционально-интегрально-дифференциальный закон регулирования.
2. Органы настройки — независимые, градуировочные характеристики линейные
2
способ формирования
пропорционально-интегрально-дифференциального
закона
 Выводы:
Выводы:
1. Схема позволяет получить пропорционально-интегрально-дифференциальный закон регулирования с необходимой точностью.
2. Степень точности зависит от величины КУС.
3. Среди положительных качеств схемы можно отметить то, что все органы настройки находятся вобратной связи. Отрицательной чертой является то, что все органы настройки взаимосвязаны и разделить органы простыми методами невозможно
3 Способ формирования пропорционально-интегрально-дифференциального закона

Выводы:
1. Данная схема позволяет получить пропорционально-интегрально-дифференциальный закон регулирования с заданной точностью.
2. Точность реализации закона регулирования зависит от величины КУС.
3. Органы настройки взаимосвязаны
4
способ формирования
пропорционально-интегрально-дифференциального
закона
 Выводы:
Выводы:
1. Данная схема позволяет реализовать пропорционально-интегрально-дифференциальный закон регулирования.
2. Параметры настройки ТИ, ТД независимы, их градуировочные характеристики — линейные.
3. КР — обратно пропорционален КОС, но при этом КР=f(Т1).
5 Способ формирования пропорционально-интегрально-дифференциального закона

Выводы:
1. Данная схема реализует пропорционально-интегрально-дифференциальный закон регулирования.
2. Органы настройки в значительной степени зависят друг от друга.
3. Градуировочные характеристики - нелинейные
6 Способ формирования пропорционально-интегрально-дифференциального закона

Выводы:
1. Данная схема реализует пропорционально-интегрально-дифференциальный закон регулирования.
2. Все органы настройки имеют линейные градуировочные характеристики.
3. При правильном порядке настройки регулятора можно не учитывать взаимную зависимость органов настойки.
30)Формирование пропорционально -интегрального закона регулирования в регуляторах с исполнительным механизмом постоянной скорости

![]()

![]()
![]()
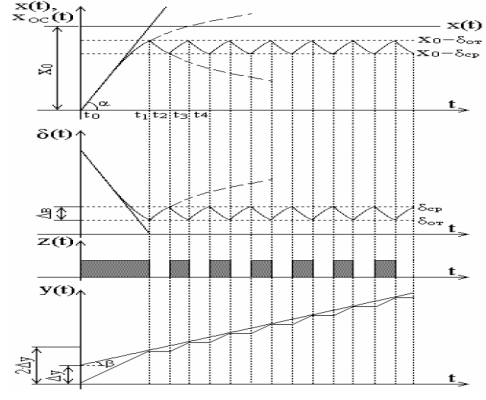
На рисунке представлена трехпозиционная схема регулирования с гистерезисом (наличие гистерезиса — одно из требуемых свойств). Δн=2·К·δСР — зона нечувствительности; Δв — зона возврата.

Для ослабления зависимости органов настройки в обратной связи используют ступенчатый сигнал
В качестве органа настройки ТИ удобнее взять время паузы (RP). В качестве органа настройки КР удобнее взять RЗ. Зона возврата не меняет КР и ТИ, но позволяет подстроить систему регулирования к динамическим свойствам объекта. Регуляторы, работающие по такому принципу, называют релейно-импульсными.

Задача градуировки органов настройки
Органом настройки называется устройство, с помощью которого устанавливается необходимый параметр регулирования. Градуировка органа настройки регулятора — процедура, с помощью которой экспериментально устанавливается соответствие между делениями шкалы органа настройки и численными значениями параметров настройки. При пропорциональном законе регулирования порядок градуировки:
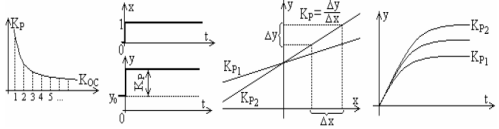

При
пропорционально-интегральном законе
регулирования градуировка КР происходит
аналогично, но при этом учитывается,
что угол наклонаградуировочной
характеристики равен
![]() ТИ
находят как время удвоения
ТИ
находят как время удвоения