

35) Релейно-импульсные регулирующие приборы
При реализации типовых алгоритмов управления обычно прибегают к коррекции исходных технических устройств введением обратных связей. Для этого используют такие обратные связи, при которых динамические свойства регулятора (включающего в себя замкнутый контур) определяются главным образом свойствами обратной связи и практически не зависят от других устройств, входящих в этот контур (рис. 22.1). Подобные связи называют функциональными обратными связями (ФОС).
Регулятор с исполнительным механизмом постоянной скорости может иметь близкие к линейным характеристики при условии импульсного управления исполнительной частью систем. Для генерации импульсов часто применяют структуры, представленные на рисунке 22.1 и содержащие релейный усилитель (РУ). По этой причине соответствующие регулирующие приборы называют релейно-импульсными.
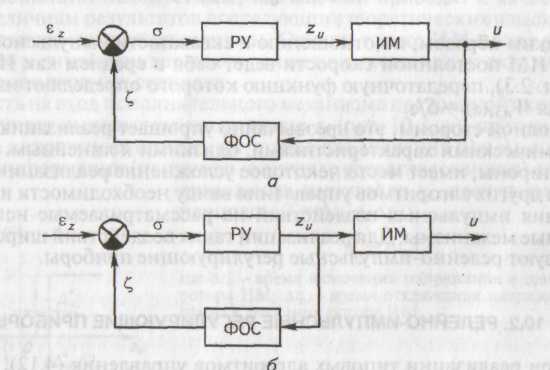
Рисунок 22.1 – Структура релейно-импульсного регулятора: а и б – возможные варианты
Пусть входной сигнал εZ в структуре (см. рис. 22.1, а), состоящей из исполнительного механизма и релейного усилителя, охваченных жесткой обратной связью, постепенно увеличивается (рис. 22.2). Тогда исполнительный механизм включится только после того, как входной сигнал пускового устройства zu выйдет за пределы зоны нечувствительности, т. е. |z|>Δ* н /2. При этом изменятся величина и и, как следствие, сигнал обратной связи

где Ко.с. — коэффициент передачи данной ФОС.
Если скорость изменения ζ больше скорости изменения входного сигнала,

то входная величина пускового устройства начнет уменьшаться и при значении
zu=Δ*H/2-Δ*B (22.1)
произойдет отключение исполнительного механизма. При неизменном выходном сигнале исполнительного механизма и = const значение сигнала обратной связи ζ тоже постоянно. Поскольку входной сигнал εZ по-прежнему увеличивается, суммарный сигнал zu также увеличивается и через некоторое время снова выйдет за пределы зоны нечувствительности. Это приведет к новому включению исполнительного механизма и новому приращению величины ζ, достаточному для компенсации изменений входного сигнала εZ и уменьшения сигнала zu до значения (22.1). Следовательно, исполнительный механизм вновь отключится и при дальнейших изменениях εZ процесс его периодических включений и отключений будет продолжаться.

Рисунок 22.2 – Характеристика релейного усилителя (с зоной нечувствительности и зоной невозврата)

Рисунок 22.3 – Переходные процессы на выходе релейно-импульсного регулятора и его элементов: εZ – сигнал на входе исполнительной части системы; ζ – сигнал на выходе обратной связи; σ – сигнал на входе релейного усилителя; u – сигнал на выходе регулятора
Аналогичный процесс генерации импульсов имеет место в структуре, представленной на рисунке 22.1, б.
Изменение средней скорости перемещения регулирующего органа достигается за счет перераспределения соотношения между длительностью посылаемых импульсов и паузами между ними.
13) В зависимости от физической природы входного (управляющего) сигнала реле подразделяются на механические (сила, давление, скорость, ускорение), магнитные, тепловые, оптические, электрические (ток, напряжение, мощность, сопротивление).
Электрические реле наиболее распространенный тип реле, широко применяемый в измерительной технике, телефонии и радиоэлектронной аппаратуре.
В свою очередь электрические реле в зависимости от наличия или отсутствия механического перемещения в самом устройстве делятся на реле электромеханические и статические электрические (коммутационные с бесконтактным выходом: полупроводниковые, электронные, оптоэлектронные и т. д.).
Электромеханические реле в зависимости от происходящих внутри реле явлений: могут быть электромагнитными, электротепловыми, электрогидродинамическими и т. п.
Среди многообразия релейных устройств, применяемых в технике, электромагнитные реле, как и ранее, занимают ведущее положение.
Классификация электромагнитных реле.
Электромагнитные реле в современной технике могут рассматриваться как подкласс электромагнитных механизмов, имеющих подвижный якорь. Существуют нерелейные электромагнитные механизмы: шаговые устройства, вибраторы, муфты и т. п. Электромагнитные реле – релейные электромагнитные механизмы.
К электромагнитным реле относятся традиционные реле с неподвижной обмоткой электромагнита и ферромагнитным якорем, а также магнитоэлектрические, электродинамические и индукционные электромагнитные реле. Некоторые типы электромагнитных реле не имеют самостоятельного якоря, функции которого выполняют магнитоуправляемые контактные детали (герконовые реле) или подвижный сердечник обмотки (плунжерный тип реле).
Электромагнитные реле, как и другие электрические реле, по роду управляющего и коммутируемого тока могут быть постоянного и (или) переменного тока.
Обычные конструкции контактной системы электромагнитных реле позволяют коммутировать как постоянный, так и переменный ток с частотами до сотен килогерц. Специальные конструкции контактной системы (согласованное волновое сопротивление ввода–вывода тока, уменьшенная паразитная емкость и т. п.) обеспечивают коммутацию высокочастотных сигналов до нескольких гигагерц.
По чувствительности входного сигнала и величине коммутируемого тока электромагнитные реле подразделяют на сверхчувствительные (10-7 – 10-10 Вт) реле, регистрирующие сверхмалые токи, а также высоко- и нормально чувствительные слаботочные (10-6 – 25 А).
Более мощные реле, коммутирующие токи более 50 А и напряжения более 1000 В, называются, соответственно, контакторами и высоковольтными реле.
Слаботочные реле стали в настоящее время самостоятельным классом электрических реле, включающим в себя наиболее распространенные электромагнитные реле с подвижным якорем, герконовые реле, электротепловые и слаботочные реле времени. К классу слаботочных реле относят также и другие виды неэлектрических слаботочных реле, например, тепловые реле. Термины и определения для электрических реле даны в ГОСТ 16022 и ГОСТ 14312.
11) Сущность процесса модуляции и основные ее виды. Амплитудная, фазовая и частотная аналоговые модуляции. Импульсная модуляция. Амплитудная, фазовая и частотная манипуляция. Цифровые виды модуляции.
Модуляция представляет собой преобразование сообщения B(t) в сигнал U(t) пригодный для передачи по данной линии связи. Для передачи информации требуется, чтобы сигналы имели для вида параметров:
1) параметры селекции – позволяет выделить полезный сигнал из совокупности сигналов помех;
2) информационный параметры – служат для переноса информации.
Управление информационными параметрами переносчиков в соответствии законов изменения передаваемого сигнала называется модуляцией.
Если под действием передаваемого сигнала B(t) информационный параметр сигнала переносчика изменяется непрерывно, то все виды модуляции называются непрерывными.
Пусть X(t) это сигнал переносчика, а B(t) это передаваемый сигнал, тогда модуляция – это преобразование двух сигналов.
Если сигнал это гармоническое колебание, тогда он может иметь амплитудную, фазовую и частотную модуляцию. Если в качестве сигнала выступает последовательность импульсов, то модуляция является импульсной.
Если при модуляции информационный параметр переносчика принимает счетное число значений, модуляцию называют дискретной.
Амплитудная модуляция.
Пусть передаваемый сигнал B(t), и сигнал переносчика X(t) = cos2Пfct
если B(t) имеет спектр огниничений полосой частот f<<w(ширина спектра), и если ограничить w величиной меньше или равной fc, то спектрыB(f-fc) и B(f+fc) не перекрываются и U(t) будет являться полосовым процессом, спектр которого ограничен в полосе fc-w<f<fc+w
В зависимости от соотношения ширины спектра w и его несущей частоты fc различают узкополосные и широкополосные частоты процессы.
Одним из основных свойств модулируемого сигнала заключается в том, что они сохраняют все детали низкочастотного модулирующего сигналаB(t), что позволяет путем демодуляции сигнала U(t) полностью восстановить исходный сигнал. Полосовой амплитудой модулированный сигналU(t) полностью эквивалентен передаваемому сигналу B(t). T=1\f
Фазовая и частотная аналоговая модуляция.
Можно показать, что любое узкополосное колебание x(t) можно записать в виде.
x(t)=xc(t)cos2Пf0t+xs(t)sin2Пf0t (1) где xc(t), xs(t) – низкочастотные колебания, которые называют квадратурным элементами.
x(t) = E(t)cos[2Пf0t+Ψ(t)]
E(t) = sqrt(x2c(t)+x2s(t))
Ψ(t) = arctg –xs(t)/ xc(t)
Фазомодулируемый сигнал можно получить из выражения (1) если сделать E(t) постоянной, а фазу изменять пропорционально модулирующему сигналу:
U(t)=A cos[2Пf0t+mB(t)] m-индекс фазовой модуляции
A = E(t) = const
Поскольку модулируется не амплитуда, а фазовый угол косинусоиды, то фазовые частотные модуляции называют угловыми.
Рассмотрим принцип фазовой модуляции на примере.
Пусть сигнало B(t) имеет форму cos, тогда
U(t)=Acos[2Пf0t+mcos2Пfmt] = Acos2Пf0t – (Am/2)*sin2П(f0+fm)*t – (Am/2)*sin2П(f0+fm)*t
При фазовой модуляции несущая модулируется по фазе с помощью этого выражения. При этом можно определить мгновенную частоту f(t) как производную
d/dt[2Пf0t+Ψ(t)]= 2Пf0 + dΨ(t)/dt
Амплитудно-импульсная модуляция.
В роли переносчика сигнала x(t)=A0Σx1(t-kT,t)
Манипуляция относятся к дискретным методам модуляции, в которых информационный параметр принимает счётное число значений.
Амплитудная манипуляция
При амплитудной манипуляции (АМн) информационным параметром является амплитуда сигнала-переносчика, которая изменяется скачкообразно под действием модулирующего сигнала.
На
рис. 2.9 показаны временные диаграммы
модулирующего ![]() и
манипулированного
и
манипулированного ![]() сигналов.
сигналов.

Рис. 2.9. Модулирующий и манипулированный сигналы.
При частотной манипуляции (ЧМн, англ. Frequency Shift Keying (FSK)) значениям "0" и "1" информационной последовательности соответствуют определенные частоты синусоидального сигнала при неизменной амплитуде. Частотная манипуляция весьма помехоустойчива, поскольку помехи телефонного канала искажают в основном амплитуду, а не частоту сигнала. Однако при частотной манипуляции неэкономно расходуется ресурс полосы частот телефонного канала. Поэтому этот вид модуляции применяется в низкоскоростных протоколах, позволяющих осуществлять связь по каналам с низким отношением сигнал/шум.
Частотная манипуляция с минимальным сдвигом (англ. Minimal Shift Keying (MSK)) представляет собой способ модуляции, при котором не происходит скачков фазы и изменение частоты происходит в моменты пересечения несущей нулевого уровня. MSK уникальна потому что значение частот соответствующих логическим "0" и "1" отличаются на величину равную половине скорости передачи данных. Другими словами, индекс модуляции равен 0,5:
m = Δf ∙ T,
где Δf = |fлог.1 – fлог.0|, T – длительность бита.
Например, при скорости передачи 1200 бит/с MSK сигнал будет сформирован из колебаний с частотами 1200 Гц и 1800 Гц соответствующих логическим "0" и "1".
Фазовая манипуляция (англ. phase-shift keying (PSK)) была разработана в начале развития программы исследования дальнего космоса; сейчас схема PSK широко используется в коммерческих и военных системах связи. Фазоманипулированный сигнал имеет следующий вид:
![]()
Фазовый член φi(t) может принимать М дискретных значений.
Виды цифровой модуляции (манипуляции)
Амплитудно-фазовая манипуляция (АФМн)
-Амплитудная манипуляция (АМн)
-Фазовая манипуляция (ФМн)
-Квадратурная амплитудная манипуляция (КАМ)
Модуляция с непрерывной фазой (МНФ)
-Частотная манипуляция (ЧМн)
-Частотная манипуляция с минимальным сдвигом
-Гауссовская манипуляция с минимальным частотным сдвигом
-Модуляция с расширением спектра
-Многоканальная модуляция (разделение с мультиплексированием каналов)