

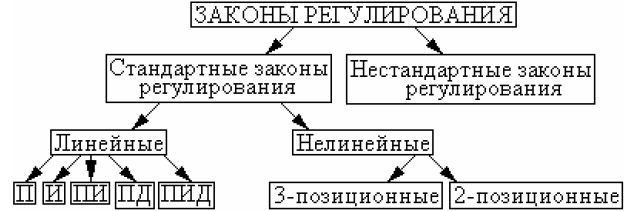
9) Классификация законов регулирования.Нелинейные
Нелинейные законы регулирования могут быть весьма разнообразными, но в стандартных регуляторах обычно применяют 2х и 3х-позиционные законы регулирования.
Общий вид записи 2-позиционного закона регулирования:
![]()
Двухпозиционный закон регулирования
![]()
Величина управляющего воздействия характеризуется С1 и С2.
Примеры устройств, работающих по 2-позиционному закону регулирования: холодильник, утюг и т.д.
Недостаток данного закона — постоянные колебания выходной величины вокруг заданного значения.
Трехпозиционный закон регулирования
![]()

10) Классификация законов регулирования. Линейные
Линейные законы регулирования
Общая запись стандартного линейного закона регулирования представляет собой пропорционально-интегрально-дифференциальный (ПИД) закон регулирования:
![]()
Линейность заключается в том, что переменная х, ее производная и интеграл входят в уравнение закона только в первых степенях.
Частные случаи: П-, И-, ПИ-, ПД-закон.
Коэффициенты С1, С2, С3 показывают удельный вес каждой из составляющих. Первая составляющая используется самостоятельно в том случае, когда необходима только устойчивость системы. Вторая составляющая устраняет статическую ошибку, возникающую при использовании пропорционального регулятора, но при этом время переходных процессов увеличивается. Третья составляющая предвосхищает изменение регулируемой переменной, т.е. учитывает изменение переменной во времени. Меняя соотношения между С1, С2 и С3 можно придавать регулятору те или иные свойства.
Пропорциональный закон регулирования
П ропорциональный
регулятор обеспечивает простой
быстродействующий процесс регулирования
системы, но дает статическую ошибку.
Эту ошибку можно уменьшить за счет
роста К, но нельзя устранить окончательно,
оставаясь в рамках пропорционального
закона. На объектах с невысокими
требованиями точности этого может быть
достаточно, но повышение К снижает
запас устойчивости. Из этого следует,
что расчет настроек регулятора
основывается на компромиссе между
точностью и устойчивостью. Пропорциональные
регуляторы осуществляют довольно
устойчивое регулирование.
ропорциональный
регулятор обеспечивает простой
быстродействующий процесс регулирования
системы, но дает статическую ошибку.
Эту ошибку можно уменьшить за счет
роста К, но нельзя устранить окончательно,
оставаясь в рамках пропорционального
закона. На объектах с невысокими
требованиями точности этого может быть
достаточно, но повышение К снижает
запас устойчивости. Из этого следует,
что расчет настроек регулятора
основывается на компромиссе между
точностью и устойчивостью. Пропорциональные
регуляторы осуществляют довольно
устойчивое регулирование.
где у(t) – выходной параметр; х(t) – входной параметр; К – коэффициент пропорциональности
Интегральный закон регулирования
Интегральный закон регулирования характеризуется отсутствием статической ошибки. На разных частотах усиление разное: при малых частотах усиление стремится к бесконечности, при высоких — к нулю.
И нтегральный
регулятор дает задержку на полпериода.
нтегральный
регулятор дает задержку на полпериода.
где ТИ – время интегрирования; у0 – начальные условия
Пропорционально-интегральный закон регулирования
В ремя
интегрирования (удвоения) — это время,
в течение которого интегральная
составляющая изменит выходную величину
y на столько, сколько изменила ее перед
этим пропорциональная составляющая.
Время удвоения служит мерой интенсивности
интегральной части.
ремя
интегрирования (удвоения) — это время,
в течение которого интегральная
составляющая изменит выходную величину
y на столько, сколько изменила ее перед
этим пропорциональная составляющая.
Время удвоения служит мерой интенсивности
интегральной части.
Пропорционально-интегральный закон регулирования — самый распространенный, так как он объединяет в себе лучшие свойства пропорционального и интегрального законов, но иногда ПИ-закон бывает недостаточно быстрым
Пропорционально-интегрально-дифференциальный закон регулирования
ПИД-закон регулирования обладает наибольшей гибкостью, то есть удовлетворяет требованиям качества регулирования на любом объекте
Р ассмотрим
свойства исполнительных механизмов
(ИМ) и их учет при формировании законов
регулирования
ассмотрим
свойства исполнительных механизмов
(ИМ) и их учет при формировании законов
регулирования