

19. Центральное поле силы(?!?)
Закон
тяготения Ньютона определяет зависимость
силы тяготения от масс взаимодействующих
тел и расстояния между ними, но при это
он не показывает, каким образом
осуществляется это взаимодействие.
Тяготение относится к особой группе
взаимодействий. Силы тяготения, например,
не зависят от того, в какой среде
взаимодействующие тела находятся.
Тяготение существует и в вакууме.
Гравитационное взаимодействие
между телами осуществляется с помощью
поля
тяготения,
или гравитационного
поля.
Это поле порождается телами и является
формой существования материи. Основное
свойство поля тяготения заключается в
том, что на всякое тело массой m, внесенное
в это поле, действует сила тяготения,
т. е.
![]() (1)
Вектор g
не зависит от m и называется напряженностью
поля тяготения. Напряженность поля
тяготения определяется силой, которая
действует со стороны поля на материальную
точку единичной массы, и совпадает по
направлению с действующей силой.
Напряженность есть силовая характеристика
поля тяготения.
Поле тяготения
называется однородным,
если его напряженность во всех точках
одинакова, и центральным,
если во всех точках поля векторы
напряженности направлены вдоль прямых,
которые пересекаются в одной точке (А),
которая неподвижна по отношению к
какой-либо инерциальной системе отсчета
(рис. 1).
(1)
Вектор g
не зависит от m и называется напряженностью
поля тяготения. Напряженность поля
тяготения определяется силой, которая
действует со стороны поля на материальную
точку единичной массы, и совпадает по
направлению с действующей силой.
Напряженность есть силовая характеристика
поля тяготения.
Поле тяготения
называется однородным,
если его напряженность во всех точках
одинакова, и центральным,
если во всех точках поля векторы
напряженности направлены вдоль прямых,
которые пересекаются в одной точке (А),
которая неподвижна по отношению к
какой-либо инерциальной системе отсчета
(рис. 1).
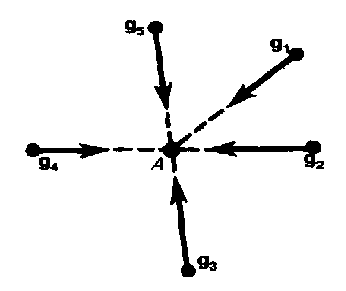
Рис.1 Для графического изображения силового поля используются силовые линии (линии напряженности), которые рисуются таким образом, что вектор напряженности поля направлен по касательной к силовой линии.
20.
Работа поля тяготения. Потенциальная
энергия в поле гравитационного
взаимодействия(формулы).Определим
работу, которую совершают силы поля
тяготения при перемещении в поле
материальной точки массой m. Вычислим,
какую надо затратить работу для удаления
тела массой m от Земли. На расстоянии R
(рис. 1) на тело действует сила
![]()
![]() При
перемещении этого тела на расстояние
dR совершается работа
При
перемещении этого тела на расстояние
dR совершается работа
![]() Знак
минус появляется потому, что сила и
перемещение в данном случае противоположны
по направлению
Если тело перемещать
с расстояния R1
до R2,
то работа
Знак
минус появляется потому, что сила и
перемещение в данном случае противоположны
по направлению
Если тело перемещать
с расстояния R1
до R2,
то работа
![]() (2)
Из формулы (2) следует, что затраченная
работа в поле тяготения не зависит от
траектории перемещения, а зависит лишь
от начального и конечного положения
тела, т. е. силы
тяготения
действительно консервативны,
а поле тяготения является потенциальным.
Работа, совершаемая консервативными
силами, равна изменению потенциальной
энергии системы, взятому со знаком
минус, т. е.
(2)
Из формулы (2) следует, что затраченная
работа в поле тяготения не зависит от
траектории перемещения, а зависит лишь
от начального и конечного положения
тела, т. е. силы
тяготения
действительно консервативны,
а поле тяготения является потенциальным.
Работа, совершаемая консервативными
силами, равна изменению потенциальной
энергии системы, взятому со знаком
минус, т. е.
![]() Из
формулы (2) получаем
Из
формулы (2) получаем
![]() (3)
Так как в формулы входит только разность
потенциальных энергий в двух состояниях,
то для удобства принимают потенциальную
энергию при R2→∞
равной нулю (P2=0).
Тогда (3) запишется в виде P1=
-GmM/R1.
Поскольку первую точку мы выбрали
произвольно, то
(3)
Так как в формулы входит только разность
потенциальных энергий в двух состояниях,
то для удобства принимают потенциальную
энергию при R2→∞
равной нулю (P2=0).
Тогда (3) запишется в виде P1=
-GmM/R1.
Поскольку первую точку мы выбрали
произвольно, то
![]() Величина
Величина
![]() является
энергетической характеристикой поля
тяготения и называется потенциалом.
Потенциал
поля тяготения
φ - скалярная величина, которая определяется
потенциальной энергией тела единичной
массы в данной точке поля или работой
по перемещению единичной массы из данной
точки поля в бесконечность. Таким
образом, потенциал поля тяготения,
создаваемого телом массой М, равен
является
энергетической характеристикой поля
тяготения и называется потенциалом.
Потенциал
поля тяготения
φ - скалярная величина, которая определяется
потенциальной энергией тела единичной
массы в данной точке поля или работой
по перемещению единичной массы из данной
точки поля в бесконечность. Таким
образом, потенциал поля тяготения,
создаваемого телом массой М, равен
![]() (4)
где R - расстояние от этого тела до
рассматриваемой точки.
Из формулы
(4) следует, что геометрическое место
точек с равными потенциалами образует
сферическую поверхность (R=const). Такие
поверхности, для которых потенциал
постоянен, называются эквипотенциальными.
Исследуем взаимосвязь между
потенциалом φ поля тяготения и его
напряженностью g. Из выражений (1) и (4)
вытекает, что элементарная работа dA,
совершаемая силами поля при малом
перемещении тела массой m, равна
(4)
где R - расстояние от этого тела до
рассматриваемой точки.
Из формулы
(4) следует, что геометрическое место
точек с равными потенциалами образует
сферическую поверхность (R=const). Такие
поверхности, для которых потенциал
постоянен, называются эквипотенциальными.
Исследуем взаимосвязь между
потенциалом φ поля тяготения и его
напряженностью g. Из выражений (1) и (4)
вытекает, что элементарная работа dA,
совершаемая силами поля при малом
перемещении тела массой m, равна
![]() С
другой стороны, dA=Fdl
(dl
- элементарное перемещение). Учитывая
(24.1), полу¬чаем, что dA=mgdl,
т. е. mgdl=
-mdφ, или
С
другой стороны, dA=Fdl
(dl
- элементарное перемещение). Учитывая
(24.1), полу¬чаем, что dA=mgdl,
т. е. mgdl=
-mdφ, или
![]() Величина
dφ/dl
характеризует изменение потенциала на
единицу длины в направлении перемещения
в поле тяготения. Можно показать, что
Величина
dφ/dl
характеризует изменение потенциала на
единицу длины в направлении перемещения
в поле тяготения. Можно показать, что
![]() (5)
где
(5)
где
![]() -
градиент скаляра φ. Знак минус в формуле
(5) показывает, что вектор напряженности
g
направлен в сторону убывания потенциала.
В качестве частного примера, исходя
из представлений теории тяготения,
рассмотрим потенциальную энергию тела,
находящегося на высоте h относительно
Земли:
-
градиент скаляра φ. Знак минус в формуле
(5) показывает, что вектор напряженности
g
направлен в сторону убывания потенциала.
В качестве частного примера, исходя
из представлений теории тяготения,
рассмотрим потенциальную энергию тела,
находящегося на высоте h относительно
Земли:
![]() где
R0
- радиус Земли. Так как
где
R0
- радиус Земли. Так как
![]() и
и
![]() то,
учитывая условие h<<R0,
получаем
то,
учитывая условие h<<R0,
получаем
![]()
21. Потенциальная энергия в поле силы упругости.
Потенциальная
энергия определяет силы упругости и
силы тяжести, ее используют для определения
электрических и магнитных сил, сил
ядерного взаимодействия.
Однако, как
это ни удивительно, никакого четкого
определения этому понятию не дается.
Просто утверждается, что она является
частью общей механической энергии
системы, зависящей от взаимного
расположения материальных точек,
составляющих эту систему, и от их
положений во внешнем силовом поле.
Численно же потенциальная энергия
системы в данном ее положении равна
работе, которую произведут действующие
на систему силы при перемещении этой
системы из этого положения в то, где
потенциальная энергия условно принимается
равной нулю.
Из этого определения
следует, что потенциальная энергия
характеризуется работой, которую она
может совершить при определенных
перемещениях материальной системы или
отдельного материального объекта. И
так как работа определяется через силу,
то, по сути дела, потенциальная энергия
является некоторым свойством действующих
на систему сил. Если же иметь в виду, что
само понятие силы тоже не имеет четкого
физического определения, то вполне
очевидно, что и определение потенциальной
энергии страдает таким же недостатком.
Из
определения потенциальной энергии
также следует, что это понятие имеет
место только для консервативных систем,
у которых работа действующих сил зависит
только от начального и конечного
положения системы. Так, для груза весом
G,
поднятого на высоту h,
потенциальная энергия будет равна:
![]() ;
(1)
для груза, прикрепленного к пружине:
;
(1)
для груза, прикрепленного к пружине:
![]() ,
(2)
где
,
(2)
где
![]() -
удлинение или сжатие пружины, k
– ее коэффициент жесткости; для двух
частиц с массами
-
удлинение или сжатие пружины, k
– ее коэффициент жесткости; для двух
частиц с массами
![]() и
и
![]() ,
притягивающихся по закону всемирного
тяготения:
,
притягивающихся по закону всемирного
тяготения:
![]() ,
(3)
где f
– гравитационная постоянная, r
– расстояние между частицами; аналогично
потенциальная энергия определяется и
для двух точечных электрических зарядов
,
(3)
где f
– гравитационная постоянная, r
– расстояние между частицами; аналогично
потенциальная энергия определяется и
для двух точечных электрических зарядов
![]() и
и
![]() .
Несмотря
на то, что потенциальная энергия
определяется через работу сил, она, в
свою очередь, используется для определения
этих сил, для чего используются частные
производные:
.
Несмотря
на то, что потенциальная энергия
определяется через работу сил, она, в
свою очередь, используется для определения
этих сил, для чего используются частные
производные:
![]() ,
(4)
которые эквивалентны одному
векторному выражению:
,
(4)
которые эквивалентны одному
векторному выражению:
![]() ,
(5)
в котором правая часть является
градиентом потенциальной энергии.
Очевидно,
для использования приведенных выражений
необходимо, чтобы потенциальная энергия
П
была нам известна и была бы однозначной
функцией координат X,
Y,
Z.
Выше
нами было показано, что силы инерции
представляют собой упругие силы,
обусловленные деформацией тел. Упругие
же силы, в свою очередь, могут быть
выражены только через потенциальную
энергию деформации. Поэтому для нас
очень важно выяснить физическую сущность
потенциальной энергии. Для этого нам
придется опуститься на более низкий
уровень структурной организации материи,
а именно на микроуровень, и посмотреть,
что же происходит с атомами при деформации
тел (рис.1).
Вполне очевидно, что при
деформации тел будут происходить
деформации орбит электронов. Здесь
может быть несколько видов деформаций:
деформации всестороннего растяжения
или сжатия (рис.1,а,б) и деформации
одностороннего растяжения или сжатия
(рис.1,в,г).
При всестороннем растяжении
или сжатии форма начальной равновесной
круговой орбиты не изменится, только
электроны переместятся на более высокий
или более низкий уровень. Однако,
соотношение между центробежными и
центростремительными силами электрического
притяжения изменится, они уже не будут
уравновешивать друг друга.
В равновесном
состоянии центробежная сила инерции,
действующая на электрон, будет равна:
,
(5)
в котором правая часть является
градиентом потенциальной энергии.
Очевидно,
для использования приведенных выражений
необходимо, чтобы потенциальная энергия
П
была нам известна и была бы однозначной
функцией координат X,
Y,
Z.
Выше
нами было показано, что силы инерции
представляют собой упругие силы,
обусловленные деформацией тел. Упругие
же силы, в свою очередь, могут быть
выражены только через потенциальную
энергию деформации. Поэтому для нас
очень важно выяснить физическую сущность
потенциальной энергии. Для этого нам
придется опуститься на более низкий
уровень структурной организации материи,
а именно на микроуровень, и посмотреть,
что же происходит с атомами при деформации
тел (рис.1).
Вполне очевидно, что при
деформации тел будут происходить
деформации орбит электронов. Здесь
может быть несколько видов деформаций:
деформации всестороннего растяжения
или сжатия (рис.1,а,б) и деформации
одностороннего растяжения или сжатия
(рис.1,в,г).
При всестороннем растяжении
или сжатии форма начальной равновесной
круговой орбиты не изменится, только
электроны переместятся на более высокий
или более низкий уровень. Однако,
соотношение между центробежными и
центростремительными силами электрического
притяжения изменится, они уже не будут
уравновешивать друг друга.
В равновесном
состоянии центробежная сила инерции,
действующая на электрон, будет равна:
![]() ,
(6)
где
,
(6)
где
![]() -
масса электрона,
-
масса электрона,
![]() -
окружная скорость электрона, соответствующая
радиусу
-
окружная скорость электрона, соответствующая
радиусу
![]() .
После
деформации величина центробежной силы
определится выражением:
.
После
деформации величина центробежной силы
определится выражением:
![]() ,
(7)
где
,
(7)
где
![]() -
окружная скорость электрона, соответствующая
радиусу r.
Поскольку
при переходе электрона с одной орбиты
на другую орбиту должен выполняться
закон сохранения момента количества
движения:
-
окружная скорость электрона, соответствующая
радиусу r.
Поскольку
при переходе электрона с одной орбиты
на другую орбиту должен выполняться
закон сохранения момента количества
движения:
![]() ,
(8)
преобразуем выражение (7), подставив
в него значение скорости
,
найденное из выражения (8):
,
(8)
преобразуем выражение (7), подставив
в него значение скорости
,
найденное из выражения (8):
![]() (9)
В
результате получим:
(9)
В
результате получим:
![]() (10)
После
этого можно найти отношение центробежных
сил
(10)
После
этого можно найти отношение центробежных
сил
![]() и
и
![]() :
:![]() (11)
Силы
электрического притяжения между ядром
и электроном будут изменяться в
соответствии с законом Кулона:
(11)
Силы
электрического притяжения между ядром
и электроном будут изменяться в
соответствии с законом Кулона:
![]() ,
(12)
,
(12)
![]() ,
(13)
где k
–
коэффициент пропорциональности,
зависящий от выбора единиц измерения.
В системе СИ
,
(13)
где k
–
коэффициент пропорциональности,
зависящий от выбора единиц измерения.
В системе СИ
![]() ,
,
![]() -
электрическая постоянная (или
диэлектрическая проницаемость вакуума),
равная
-
электрическая постоянная (или
диэлектрическая проницаемость вакуума),
равная
![]() .
Отношение
сил электрического притяжения будет
равно:
.
Отношение
сил электрического притяжения будет
равно:
![]() (14)
Имея
в виду равенство
(14)
Имея
в виду равенство
![]() ,
найдем отношение центробежной силы
инерции и силы электрического
притяжения:
,
найдем отношение центробежной силы
инерции и силы электрического
притяжения:
![]() ,
(15)
откуда получим:
,
(15)
откуда получим:
![]() (16)
Разность
между центробежной и электрической
силами в зависимости от величины
деформации определится выражением:
(16)
Разность
между центробежной и электрической
силами в зависимости от величины
деформации определится выражением:
![]() ,
(17)
где
,
(17)
где
![]() .
При
.
При
![]() (растяжение)
(растяжение)
![]() и
и
![]() ,
то есть сила, противодействующая
растяжению, будет направлена к центру
атома.
При
,
то есть сила, противодействующая
растяжению, будет направлена к центру
атома.
При
![]() (сжатие)
(сжатие)
![]() и
и
![]() ,
то есть противодействующая сила
направлена во внешнюю сторону.
В
случае одностороннего растяжения
(рис.1,в) и сжатия (рис.1,г) орбиты электронов
будут деформироваться в эллиптические
кривые, что также приведет к появлению
противодействующих сил
,
то есть противодействующая сила
направлена во внешнюю сторону.
В
случае одностороннего растяжения
(рис.1,в) и сжатия (рис.1,г) орбиты электронов
будут деформироваться в эллиптические
кривые, что также приведет к появлению
противодействующих сил
![]() ,
обусловленных наличием сил инерции.
Параметры
орбиты электронов могут быть найдены
по формулам, полученным в главе III §10
для движения планет.
Таким образом,
мы показали, что упругие силы, появляющиеся
при деформации тел, являются результатом
действия сил инерции на электроны в
атомах тел. Ниже также будет показано,
что и силы электрического притяжения
будут иметь инерционную природу.
Напомним, что силы инерции, в свою
очередь, являются следствием ускоренного
движения материальных объектов при
наличии неоднородного поля кинетической
энергии. Такое поле и существует во
вращающихся вокруг ядра электронах.
Значит, и электроны должны деформироваться
при своем вращении вокруг ядра атома и
при вращении вокруг своей оси.
Интересно
отметить, что при прямолинейном движении
тел с постоянным ускорением градиента
скорости по их длине в направлении
движения не будет, хотя на них и будут
действовать силы инерции. Такое положение
как раз и объясняется тем, что действие
сил инерции перемещается на микрочастицы,
из которых состоит тело. Результирующая
же сила инерции, действующая на тело в
целом, будет представлять собой сумму
микроинерционных сил, действующих на
каждый электрон.
Потенциальная
энергия также будет являться следствием
действия микроинерционных сил,
обусловленных движением микрочастиц
в пространстве, поэтому можно утверждать,
что потенциальная энергия является
свойством кинетической энергии тела,
но не на макро, а на микроуровне его
структурной организации, которая,
однако, зависит от скорости изменения
кинетической энергии при движении всего
тела в целом, то есть от действующей на
него внешней силы. В этом и будет
заключаться физическая сущность
потенциальной энергии.
На первый
взгляд может показаться, что такое
определение потенциальной энергии
будет справедливо только при упругих
деформациях тел, но не может характеризовать
физической сущности потенциальной
энергии, например, поля тяготения.
Однако, это не так. Ниже нами будет
показано, что силы тяготения могут быть
объяснены упругими деформациями частиц
вакуума, с движением которых связано
существование поля кинетической энергии,
через посредство которого и могут быть
найдены эти силы. То же самое можно
сказать и о других видах потенциальной
энергии, возникающей при взаимодействии
материальных объектов.
,
обусловленных наличием сил инерции.
Параметры
орбиты электронов могут быть найдены
по формулам, полученным в главе III §10
для движения планет.
Таким образом,
мы показали, что упругие силы, появляющиеся
при деформации тел, являются результатом
действия сил инерции на электроны в
атомах тел. Ниже также будет показано,
что и силы электрического притяжения
будут иметь инерционную природу.
Напомним, что силы инерции, в свою
очередь, являются следствием ускоренного
движения материальных объектов при
наличии неоднородного поля кинетической
энергии. Такое поле и существует во
вращающихся вокруг ядра электронах.
Значит, и электроны должны деформироваться
при своем вращении вокруг ядра атома и
при вращении вокруг своей оси.
Интересно
отметить, что при прямолинейном движении
тел с постоянным ускорением градиента
скорости по их длине в направлении
движения не будет, хотя на них и будут
действовать силы инерции. Такое положение
как раз и объясняется тем, что действие
сил инерции перемещается на микрочастицы,
из которых состоит тело. Результирующая
же сила инерции, действующая на тело в
целом, будет представлять собой сумму
микроинерционных сил, действующих на
каждый электрон.
Потенциальная
энергия также будет являться следствием
действия микроинерционных сил,
обусловленных движением микрочастиц
в пространстве, поэтому можно утверждать,
что потенциальная энергия является
свойством кинетической энергии тела,
но не на макро, а на микроуровне его
структурной организации, которая,
однако, зависит от скорости изменения
кинетической энергии при движении всего
тела в целом, то есть от действующей на
него внешней силы. В этом и будет
заключаться физическая сущность
потенциальной энергии.
На первый
взгляд может показаться, что такое
определение потенциальной энергии
будет справедливо только при упругих
деформациях тел, но не может характеризовать
физической сущности потенциальной
энергии, например, поля тяготения.
Однако, это не так. Ниже нами будет
показано, что силы тяготения могут быть
объяснены упругими деформациями частиц
вакуума, с движением которых связано
существование поля кинетической энергии,
через посредство которого и могут быть
найдены эти силы. То же самое можно
сказать и о других видах потенциальной
энергии, возникающей при взаимодействии
материальных объектов.