

3.2 Сферические шарнирные механизмы.
В сферических шарнирных механизмах оси шарниров пересекаются в одной точке. Наименьшее число звеньев равно 4. Сферический четырёхзвенник применяется, например, в многопоршневых насосах и в устройствах стабилизации летательных аппаратов. Частный случай сферического четырёхзвенника, в котором оси двух вращательных пар взаимно перпендикулярны, — карданный механизм.
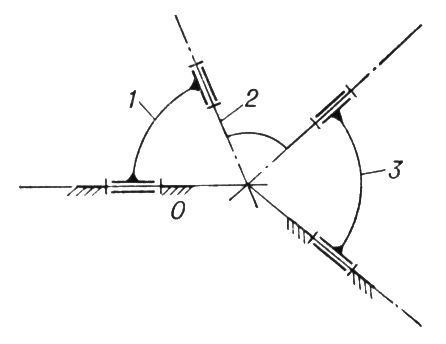
Сферический четырёхзвенник
0 - неподвижное звено
1-3 – подвижные звенья
3.3 Пространственные шарнирные механизмы.
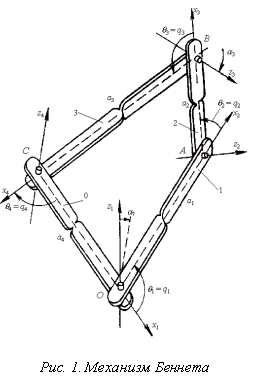
В пространственном шарнирном механизме оси вращательных пар скрещиваются под различными углами. Такой механизм должен иметь не менее 7 звеньев (пространственный семизвенник). Однако при выполнении определённых соотношений между линейными и угловыми размерами звеньев минимальное число звеньев уменьшается до 4 (например, механизм Беннета). Пространственные шарнирные механизмы применяются в сельскохозяйственных машинах, машинах-автоматах (например, в лёгкой и пищевой промышленности) и т.д.
Использование пространственных шарнирных механизмов в технике связано с их существенными преимуществами по сравнению с плоскими. Применение пространственных механизмов способствует созданию компактных надежно работающих машин и устройств.
4. Виды шарнирных механизмов по способу задания требуемого движения рабочего звена.
По способу задания требуемого движения рабочего звена шарнирные механизмы подразделяются на перемещающие, направляющие, передаточные и механизмы для движения с остановками.
4.1 Перемещающие шарнирные механизмы
Перемещающие шарнирные механизмы предназначены для перемещения рабочего звена из одного положения в другое. Число заданных положений обычно равно 2, реже 3 или 4. Перемещающие шарнирные механизмы применяются в металлургических машинах (кантователи, опрокидыватели, механизмы для закрытия лёток), в машинах-автоматах пищевой промышленности для перемещения рабочих органов и др.
4.2 Направляющие шарнирные механизмы.
Направляющие шарнирные механизмы предназначены для перемещения по заданной кривой одной точки звена, не образующего кинематических пар со стойкой. Наибольшее распространение имеют шарнирные механизмы, направляющие по дуге окружности (круговые направляющие механизмы), и прямолинейно-направляющие механизмы (например, Чебышева параллелограмм). Они применяются также для черчения и огибания парабол и гипербол (например, шарнирный механизм для шлифования зеркал астрономических приборов).
Прямолинейность движения достигается не при помощи специальных прямолинейных направляющих, а путём подбора соотношений между длинами звеньев механизма. Примером такого механизма может служить параллелограмм Уатта, которым была снабжена паровая машина Джеймса Уатта.
Паровая машина Джеймса Уатта
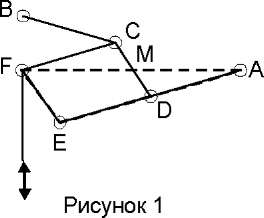
Прибор состоит из стержней, соединенных между собой подвижными шарнирами С, D, E, F. В точках A и B стержни закреплены, однако с возможностью вращения. В точке F присоединен поршневой шток паровой машины. Механизм должен сообщать концевой точке F поршневого штока прямолинейное движение, необходимое для того, чтобы поршень не шатался и не застревал в цилиндре. Математическое исследование показывает, что хотя точка F шарнирного механизма Уатта не будет двигаться по прямой, тем не менее в достаточно малой области это движение можно рассматривать как приближенно-прямолинейное, так что технические требования относительно прямолинейности движения будут удовлетворены этим механизмом.
Параллелограмм CDEF, благодаря которому механизм получил свое наименование, не является его самой существенной частью. Он служит лишь для того, чтобы увеличить пригодную часть траектории. Существенной частью механизма нужно считать скорее систему стержней ADCB, в которой середина M среднего стержня DC при не слишком больших ее удалениях описывает почти прямолинейный путь. Если далее AD = DE = CF = ВС и DC = EF (стержень AE в шарнире D не сгибается), то точки A, M и F всегда лежат на одной прямой, в силу подобия треугольников ADM и AEF. Далее, так как AF (на том же самом основании) вдвое больше AM, то точка F описывает траекторию, подобную траектории точки M, только в удвоенном масштабе. Можно аналогичным образом увеличить траекторию точки M в k раз, если взять параллелограмм таким, чтобы AD: AE = DM: EF = 1: k . Проблема выпрямления траектории имела большое значение для машиностроения, и поэтому ей было посвящено большое количество работ. Метод, разработанный Уаттом, в наши дни уже не находит применения: даже самый поверхностный осмотр наружных частей механизма локомотива убеждает нас в том, что в настоящее время предпочитается иной метод выпрямления - с помощью крейцкопфа, движущегося между двумя параллелями. Возможно, что неверные представления о значении трения побудили ранних машиностроителей отказаться в свое время от идей крейцкопфа и прийти вместо того к шарнирному прямилу.
Проблема построения прямолинейно направляющего механизма заинтересовала не только техников, она привлекла к себе также внимание математиков. Последние, конечно, поставили проблему во всей ее строгости: найти такой шарнирный механизм, в котором один шарнир теоретически движется по прямой. Над параллелограммом Уатта и его усовершенствованиями работал великий русский математик П.Л. Чебышев, но задачу отыскания точного прямолинейно направляющего механизма ему, однако, решить не удалось. После многократных тщетных попыток найти решение этой проблемы в математических кругах в середине XIX века было высказано даже сомнение в возможности точного решения проблемы выпрямления посредством шарнирных механизмов.
Только в 1864 г. французский генерал Поселье изобрел аппарат, с помощью которого можно было производить выпрямление, а также и различные другие операции, аппарат был назван инверсором. Впоследствии, как это часто случается в истории открытий, удалось найти еще целый ряд других решений проблемы, причем прямая линия получается в них лишь как частный случай обширного класса кривых, построение которых возможно с помощью шарнирных механизмов. Рассмотрим шарнирный механизм Поселье. Он назван инверсором на том основании, что с его помощью можно выполнять инверсию. Инверсия есть частный вид отображения плоскости на себя. Под отображением понимается установление некоторого соответствия, в силу которого каждой точке данной фигуры соответствует некоторая другая точка - ее отображение или образ. Точка-образ не всегда отлична от ее оригинала. При параллельном переносе каждая точка действительно отображается в другую, отличную от нее точку. При вращении же и растяжении центры переходят сами в себя. При зеркальном отображении любая точка той прямой, которая служит зеркалом, также переходит сама в себя.