

МОУ средняя школа № 10 с углублённым изучением отдельных предметов
Проект
Шарнирные механизмы
Выполнил: ученик 8 «А» класса
Арапов Артём
Проверила: Перевезенцева Людмила Германовна
Г. Жуковский
Содержание
1. Введение
2. Основные определения.
3. Виды шарнирных механизмов
по характеристике движения
3.1 Плоские шарнирные механизмы.
3.2 Сферические шарнирные механизмы
3.3 Пространственные шарнирные механизмы
4. Виды шарнирных механизмов
по способу задания требуемого движения
рабочего звена.
4.1 Перемещающие шарнирные механизмы
4.2 Направляющие шарнирные механизмы
4.3 Передаточные шарнирные механизмы
4.4 Шарнирные механизмы для движения
с остановками
5. Вывод
6. Список литературы
1.Введение
Шарнирные механизмы широко распространены в современном машиностроении в связи с присущими им достоинствами: высокой технологичностью изготовления, возможностью выполнения шарнирных соединений на подшипниках качения, небольшим износом соприкасающихся поверхностей, долговечностью, надежностью в работе и ремонтоспособностью. В моём проекте будут рассматриваться: строение шарнирных механизмов, их кинематика и значение шарнирных механизмов в современном обществе
2.Основные определения
Механизм (от греч. mechane - машина), система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения др. тел. Механизм составляют основу большинства машин, применяются во многих приборах, аппаратах и технических устройствах.
Твёрдое тело, входящее в состав механизма, называемое звеном, может состоять из одной или нескольких неподвижно соединённых деталей (отдельно изготовленных частей).
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Наиболее распространённые кинематической пары: вращательная (шарнир), поступательная (ползун и направляющая), винтовая (винт и гайка), сферическая (шаровой шарнир).
Если в преобразовании движения, кроме твёрдых тел (звеньев), участвуют жидкие или газообразные тела, то механизм называют соответственно гидравлическим или пневматическим.
Шарнирный механизм - это механизм, звенья которого образуют только вращательные кинематические пары (шарниры).
Кинема́тика (греч. κινειν — двигаться) в физике — раздел механики, изучающий математическое описание (средствами геометрии, алгебры, математического анализа…) движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.).
Сте́пени свобо́ды — характеристики движения механической системы.
Объекты, изучаемые механикой, называются механическими системами.
3.Виды шарнирных механизмов по характеристике движения.
По видам движения звеньев шарнирные механизмы подразделяются на плоские, сферические и пространственные общего вида.
3.1 Плоские шарнирные механизмы.
В плоских шарнирных механизмах оси шарниров параллельны, и поэтому все звенья совершают плоскопараллельное движение. Простейший плоский шарнирный механизм состоит из 4 звеньев и называется шарнирным четырёхзвенником .
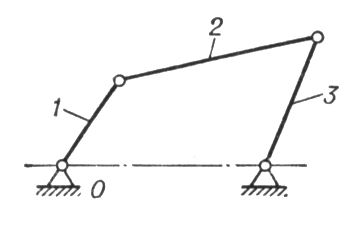
Шарнирный четырёхзвенник
0 – неподвижное звено
1; 3 – подвижные звенья
2 - соединительное звено
Если каждое соединение звеньев имеет лишь одну вращательную степень свободы, то обычно такой механизм является плоским. В этом случае можно определить положения всех звеньев механизма, если известно положение любых двух из этих звеньев. Одно из звеньев обычно постоянно остаётся неподвижным (такое звено называется основанием или рамой). Поэтому для определения положения всех звеньев, как правило, требуется определить положение только одного из них. Те два звена, которые шарнирно соединены с основанием, называются основными звеньями. Оставшееся звено, которое соединяет между собой основные звенья и не имеет непосредственной связи с основанием, называется сцепкой. Одно из основных звеньев, к которому приложено внешнее силовое воздействие, называется ведущим звеном (если оно вращается, то оно называется кривошипом). Другое основное звено является ведомым, и его движение полностью задаётся движением входного звена.
Плоские четырёхзвенные механизмы применяют для многих случаев преобразования одного вида движения в другое. Но как правило, они используются для преобразования вращательного движения в качательное (реже наоборот) или равномерного вращательного в неравномерное вращательное.
Эти механизмы были особенно популярны в прошлом, до начала компьютерной эры, так как их расчёт намного проще по сравнению с расчётами более сложных механизмов.
Для четырёхзвенного механизма справедлив следующий закон:
Непрерывное вращательное движение, какого либо из звеньев возможно только в таком четырёхзвенном механизме, у которого сумма длин наиболее короткого и наиболее длинного звеньев не превышает сумму длин оставшихся двух звеньев.