

|
НТУУ «Київський політехнічний інститут» Кафедра приладів і систем орієнтації та навігації |
|
Гіроскопічний тахометр. Схеми і принцип дії |
|
Реферат з дисципліни «Введення в спеціальність» |
|
|
Перевірив:
Доц. Бондар П.М.
Захищено з оцінкою
__________________
Виконав:
Студент групи ПГ-11
Кушнір В.В.
|
[Введите аннотацию документа. Аннотация обычно представляет собой краткий обзор содержимого документа. Введите аннотацию документа. Аннотация обычно представляет собой краткий обзор содержимого документа.] |
Зміст
Анотація 3
Вступ 4
Основна частина 5
Висновок 14
Список використаної літератури 22
Анотація
Мова: Українська;
В даному рефераті розглянуто розвиток, основні задачі, які вирішують гіроскопічні тахометри. Також доведено актуальність в теперішній час датчиків кутової швидкості. Наведено основні типові схеми роботи пристроїв, а також наведені формули, що використовуються для розрахунку параметрів.
Язык: Русский;
В данном реферате рассмотрены развитие, основные задачи, которые решают гироскопические тахометры. Также доказано актуальность использования в настоящее время датчиков угловой скорости. Приведены основные типовые схемы работы устройств, а также приведены формулы, используемые для расчета параметров.
Language: English;
In this lecture considers with the development, the mains problems that solve gyroscopic tachometers. There proven actuality in the present angular velocity sensors. The basic scheme of the typical devices, and are the formula used to calculate the parameters.
Вступ
Останнім часом набувають широкого застосування нові прилади, що базуються на принципі роботи гіроскопічного тахометра. Тому цікаво дізнатися про те як працюють прилади на цій основі.
Гіроскопічні тахометри (гіротахометри) – це гіроскопічні пристрої для вимірювання кутової швидкості руху основи. Їх використовують переважно в схемах бортової автоматики для вимірювання швидкості повороту рухомих об’єктів.
Гіроскопічні тахометри відрізняються датчиків кутової швидкості (ДКШ) інших типів, в тому числі і подібних по принципу роботи (також інерційних) центробіжних тахометрів, низьким порогом чутливості. Ця особливість робить їх придатними для вимірювання дуже малих кутових швидкостей. Найбільше розповсюджені гіротахометри для вимірювання кутової швидкості порядку 10-1…102 градусів в секунду (10-3…2-1 с).
Величини кутових швидкостей, які можуть вимірювати гіротахометри, обмежується знизу рівнем власних шумів приладу, зокрема, неконтрольованих шкідливими моментами, діючим навколо осі підвісу чутливого елементу, моментом сил сухого тертя на осі підвісу. Згори діапазон кутових швидкостей, які можуть вимірювати гіротахометри, обмежень не мають. Проте на практиці для вимірювання дуже великих кутових швидкостей починаючі з 101…102 с-1обґрунтованіше використовувати центробіжні тахометри, більш прості по конструкції і більш дешевші.
Основна частина
-
Призначення
-
Дійсний технічний опис розповсюджується на уніфікований ряд датчиків кутових швидкостей (ДКШ);
-
Датчик призначений для видачі електричного сигналу, пропорційного кутовій швидкості руху навколо одної з його осей;
-
Електричний сигнал знімається з клем датчика у вигляді напруги в вольтах або у вигляді вихідного співвідношення опорів (у відсотках власного опору потенціометра). Дивись ідентичну схему гіроскопа №6;
-
Датчики класифікуються по конструкційним і експлуатаційним ознакам у відповідності з таблицею №1;
Таблиця №1
|
№ п/п |
Ознака класифікації |
Визначення класу ознаки класифікації |
Умовне позначення |
|
1 |
Конструкційне виконання |
Кріплення датчика фланцеве, з’єднане із джгутом, що підводить живлення до датчика, штепсельним роз’ємом |
1 |
|
Кріплення датчика хомутом, з’єднання з джгутом, що подає живлення до датчика, пайкою. Призначений в основному для встановлення в БДГ. |
2 |
||
|
2 |
Діапазон вимірюваної кутової швидкості о/сек. |
± 6 ± 12 ± 18 ± 20 ± 45 ± 60 ± 120 ± 180 ± 300 ± 600 |
6 12 18 20 45 60 120 180 300 600
|
|
№ п/п |
Ознака класифікації |
Визначення класу ознаки класифікації |
Умовне позначення |
|
3 |
Напруга і частота живлення гіродвигуна |
3-х фазний змінний струм 400 Гц 36 В 3-х фазний змінний струм 500 Гц 40 В 3-х фазний змінний струм 1000 Гц 36 В |
А Б В |
|
4 |
Застосування |
Для безпілотних літальних апаратів Для пілотних літальних апаратів |
Без індексу 0 |
-
Шифр датчика створюється із позначень окремих класифікаційних ознак, поставлених в тій послідовності, як вони приведені в таблиці №1. Наприклад: ДКШ1-60А – Датчик кутової швидкості уніфікований з фланцевим кріпленням, з штепсельним роз’ємом, діапазон вимірювання ± 60о/сек., напруга живлення гіродвигуна 36В частотою 400 Гц для безпілотних літальних апаратів;
-
Нормальна робота датчика забезпечується при умовах вказаних в таблиці №2;
Таблиця №2
|
Умова позначення варіанту |
Тиск навколишнього середовища |
Відносна вологість |
Температура навколишнього середовища |
|
А Б В |
Від нормального атмосферного до 10-6 мм. ртутного стовпця |
95 ± 3% при температурі +40оС |
-60оС до +60оС і після перебування датчика в робочій частоті в середовищі при +200оС починає з нормальної. На протязі 5 хвилин. |
|
ДС |
Від нормального атмосферного до 5 мм. ртутного стовпця |
Від -60оС до +60оС і після перебування в не робочому стані в середовищі при +85оС на протязі 2-х годин. |
-
Датчик може працювати при взаємодії вібрацій і лінійних прискорень вказаних в таблиці №3;
Таблиця №3
|
Варіант виконання |
Вібрації в 3-х взаємно - пенпердикулярних площинах |
Лінійне прискорення в 3-х взаємно - пенпердикулярних площинах |
||||||
|
Частота Гц. |
Амплітуда вібрації мм. |
Пере-вантаження од. |
Розмах коливального вихідного сигналу в % живлення потенціометра небільше |
Пере-вантаження од. |
Час дії по кожній осі хв. |
Відхилення нульового сигналу в % від величини напруги потенціометра не більше |
||
|
А С |
5-10 10-35 50-300 |
1,0 0,7 0,5 |
5 |
7 |
- |
- |
- |
|
|
А Б В |
5-30 30-50 50-2000 |
1,0
|
4-5 5-30 |
10- для діапазону 6, 12, 18 о/сек 7 – для інших діапазонів |
35 |
3 |
3-для діапазонів 6, 12, 18 о/сек і не більше 2 для інших діапазонів |
|
-
Після дії перевантаження, вказаних в таблиці №4, нормальна робота датчика не порушується;
Таблиця №4
|
Варіант виконання |
Вібрації в 3-х взаємно - пенпердикулярних площинах |
Лінійне прискорення в 3-х взаємно - пенпердикулярних площинах |
Удари в 3-х взаємно - пенпердикулярних площинах |
|||||
|
Частота Гц. |
Амплітуда вібрації мм. |
Пере-вантаження од. |
Пере-вантаження од. |
Час дії кожної вісі |
Пере-вантаження од. |
Сумарна кількість ударів |
Частота ударів у хвилину |
|
|
А С |
5-10 10-35 50-300 |
1,0 0,7 0,5 |
5 |
15 |
3 хв. |
12 |
10000 |
40-30 |
|
А Б В |
5-30 30-50 50-2000 |
1,0 |
4-5 5-30 |
60 |
20 сек. |
35 |
10 |
- |
-
Схеми і принцип дії гіроскопічного тахометра
Принцип дії датчика кутових швидкостей традиційного ДКШ основану на властивості гіроскопа з двома ступенями свободи зміщувати вектор гіроскопа обертання з вектором вимушеного коливання по найкоротшій відстані. На рисунку 3 подано схему двохступеневого гіроскопа
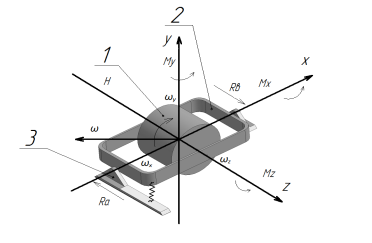
Рисунок 1 – Схема двохступеневого гіроскопа (1 – ротор гіроскопа; 2 – рамка; 3 – підшипник з основою)
******************
Розглянемо основні закономірності й параметри руху коливальних систем з одним ступенем вільності на прикладі двоступеневого гіротахометра.
Для складання рівнянь руху використаємо метод кінетостатики, утримуючи в рівняннях тільки моменти сил інерції обертального прискорення, гіроскопічні моменти та зовнішні моменти, що створюються пружним зв’язком та демпфером.
Згідно з рисунком 1, гіроскопічний момент має дві складові, викликані обертанням основи з кутовими швидкостями Uxc та Uyc:

 (1)
(1)
Спрямовані вздовж від’ємного напрямку вимірювальної осі.
Поява
моменту сил інерції обертального
прискорення обумовлена рухом гіроскопу
з прискоренням
 в інерціальному просторі відносно
вимірювальної осі zc.
Величина цього моменту дорівнює:
в інерціальному просторі відносно
вимірювальної осі zc.
Величина цього моменту дорівнює:

Де I1 – момент інерції гіроскопу спільно з рамкою підвісу відносно осі: zc.
Зовнішній
момент сил пружності пружин дорівнює
 ,
момент сил демпфірування
,
момент сил демпфірування .
.
Згідно з методом кінетостатики проекція всіх моментів на вимірювальну вісь повинна дорівнювати нулю, тому одержимо:

Або
 (2)
(2)
Де - сума моментів-перешкод, діючих вздовж
вимірювальної осі.
- сума моментів-перешкод, діючих вздовж
вимірювальної осі.
У вірно спроектованих приладах кут повороту βне перевищує одиниць градусів, тому можна вважати, що coosβ≈ 1, а момент перешкод значно менший вимірюваного моменту HUxc. Тому при дослідженні динаміки руху гіротахометра можна використовувати рівняння руху (2) у вигляді:
 (3)
(3)
Лінеарізоване рівняння (4) часто записують також у вигляді:
(формула 4)
Де h = (формула ) – коефіцієнт згасання коливань; (формула) – частота власних незгасаючих коливань гіротахометра.
(Вільні коливання гіротахометра)
Розглянемо
малі (β << 1) коливання чутливого
елемента (ЧЕ) гіротахометра за умови
відсутності зовнішніх дій (
 ).
).
У даному випадку рух XT визначається енергією, що він набув у початковий момент часу t = 0. Одержавши в цей час деяке відхилення x0 від положення рівноваги (тобто початкову потенційну енергію) і початкову швидкість β0 (початкову кінетичну енергію), ЧЕ буде рухатися під впливом внутрішніх сил, які виникають при зміні його фазового стану. Такі коливання називають вільними коливаннями.
Рівнянням вільних коливань являють собою лінійне диференціальне рівняння з постійними коефіцієнтами
(формула 5)
Загальний розв'язок цього рівняння є лінійною комбінацією двох показових функцій:
(формула 6)
Де A і B – довільні сталі; p1і p2 – корені характеристичного рівняння
(формула)
Розв’язки характеристичного рівняння p1і p2 у загальному випадку визначаються співвідношеннями
(формула 7)
Залежно від величини коефіцієнта згасань h розрізняють такі випадки руху:
-
h = 0 – незгасаючі коливання;
-
h<ω0 – слабке згасання коливань;
-
h = ω0 –критичне згасання коливань;
-
h > ω0 –сильне загасання.
– довільні сталі; p1і p2 – корені характеристичного рівняння
(формула)
(Вимушені коливання гіротахометра)
****************
-
Методи підвищення точності
-
Гідростатичний підвіс – додавання води між блоком з гіроскопом і корпусом
-
Компенсаційні схеми – заміна механічного гальмування і вимірювання на електричне.
-
Приклад конструкції