

СОДЕРЖАНИЕ
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
1.1. Определение степени подвижности плоских механизмов
1.2. Структурная классификация механизмов по Ассура
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
2.1. Построение планов положений
2.2. Построение траекторий точек
2.3. Построение планов скоростей
2.4. Построение планов ускорений
2.5. Кинематический анализ механизмов методом диаграмм.
ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
3.1. Определение сил и моментов инерции звеньев
3.2. Кинетостатический расчет механизмов методом планов сил
3.3. Определение уравновешивающей силы методом Жуковского
ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
4.1 Графическое интегрирование
4.2 Динамический синтез
4.3. Кинематический синтез
ПРОЕКТИРОВАНИЕ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
5.1 Определение геометрических параметров зацепления
5.2 Вычерчивание зацепления
5.3 Определение коэффициента перекрытия
СПИСОК ЛИТЕРАТУРЫ

Лист №1
Кинематический анализ механизма.
И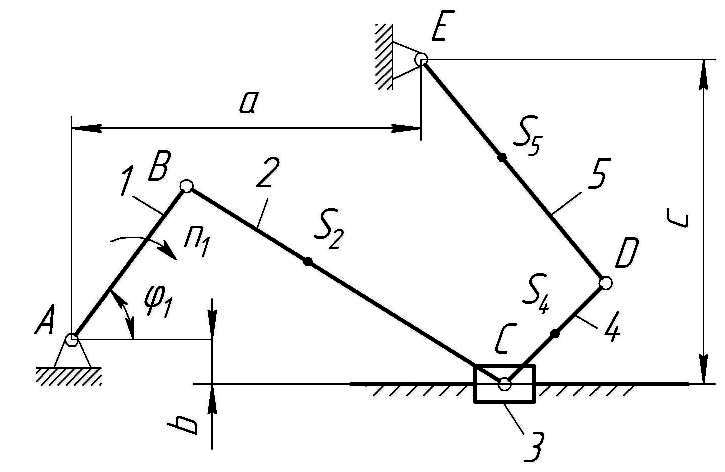 сходные
данные:
сходные
данные:
lАВ = 0,2 м
lВС = 1 м
lED =0,4 м
lЕD = 0,8 м
lEF = 1,7м
lBS2= 0,6 м
l СS4 = 0,25 м
lES = 0,3 м
а = 0,5 м
в = 0,1 м
с = 0,8 м
n = 250 об/мин
Положения для планов ускорений, 5, 9, 12.
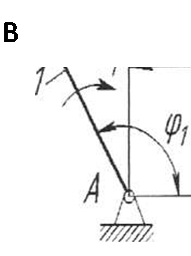
1. Структурный анализ плоских механизмов
Механизм имеет пять подвижных звеньев. Названия звеньев: 1 – кривошип; 2 – шатун; 3 – коромысло; 4 – шатун; 5 – ползун. Стойка принята за нулевое звено. Звенья соединены между собой семью кинематическими парами V класса (на схеме они обозначены буквами латинского алфавита). Данные о кинематических парах сводим в таблицу.
|
обозначение КП |
Шифр КП |
номера звеньев, образующих КП |
характер относительного движения звеньев КП |
класс КП |
|
А |
[1В] |
О и 1 |
вращательное |
V |
|
В |
[1В] |
1 и 2 |
вращательное |
V |
|
С1 |
[1B] |
2 и 3 |
вращательное |
V |
|
С2 |
[1П] |
3 и О |
поступательное |
V |
|
С3 |
[1B] |
3 и 4 |
вращательное |
V |
|
D |
[1B] |
4 и 5 |
вращательное |
V |
|
E |
[1В] |
5 и О |
вращетельное |
V |
 Определяем
подвижность механизма по формуле:
Определяем
подвижность механизма по формуле:
![]()
где n = 5 - число подвижных звеньев; p5 = 7 — число кинематических пар V класса; р4 = 0 - число кинематических пар IV класса.
Тогда
![]()
Раскладываем механизм на структурные группы. Прежде всего, отсоединяем группу
Ассура, состоящую из звеньев 4 и 5 и трех кинематических пар: вращательных F и Е и поступательной F (рис. 3, а). Степень подвижности этой группы после присоединения к стойке:
![]()
Группа 4 – 5 является группой II класса II порядка.
Затем отсоединяем группу, состоящую из звеньев 2 и 3 и трех вращательных пар В, С и Д. (Степень подвижности этой группы после присоединения к стойке:
![]()
Это группа II класса II порядка.
После отсоединения указанных групп остался первичный механизм, состоящий из кривошипа 1, присоединенного к стойке кинематической парой Oi (рис. 3, в), и обладающий степенью подвижности
![]()
В целом рассматриваемый механизм является механизмом II класса. Формула строения механизма имеет вид:
ПМ
(0;1) ![]() II (2;3)
II (2;3) ![]() II (4;5)
II (4;5)
2. Кинематический анализ механизмов
2.1 Построение планов положений
Для построения плана принимаем, что длину кривошипа lAB на схеме будет изображать отрезок AB, длина которого равна 30 мм.
Тогда масштаб длин плана
![]()
Затем вычисляем длины остальных отрезков, которые будем откладывать на чертеже:
![]()
![]()
![]()
![]()
![]()
![]()

Для нахождения крайних положений точки В делаем две засечки из центра А радиусами rmin= ВC - АB = 132-40=92 мм и rmах = ВC + АB =132+40=172 мм находим положения на дуге радиуса CD . Получаем точки C1 и C12. Полученные точки соединяем с т. А и получаем положения точек В1 и В12 соответственно.
Соединяем точки C1 и C12 с точкой D, находим положения точек E1, E12, F1, F12 и получаем два положения механизма, соответствующие крайним положениям точки В.
Разбиваем окружность радиуса АB, начиная от точки B0, на двенадцать равных и нумеруем точки деления в направлении вращения звена АВ. Используя метод засечек, строим первое, второе и все последующие положения механизма.