

Після підстановки цих виразів у (1) отримується рівняння руху механічної частини електропривода, представленої одномасовою розрахунковою схемою
![]()
де ![]() - кутове прискорення маси.
- кутове прискорення маси.
Це рівняння називається основним рівнянням руху електропривода. Воно вірно описує рух у цілому, коли вплив пружних зв’язків несуттєвий. На його основі складається передаточна функція та структурна схема жорсткої механічної частини. Після заміни
![]() ,
,
![]()
передаточна функція має вигляд
![]()
Як видно, механічна частина являє собою інтегруючу ланку

Якщо вихідною координатою механічної частини є кут повороту, то структурна схема доповнюється інтегратором

так як
![]() ,
,
![]() і остаточно передаточна функція
дорівнює
і остаточно передаточна функція
дорівнює
![]()
Аналогічно складається рівняння руху та структурна схема двомасової (і=2) розрахункової схеми без врахування внутрішнього в’язкого тертя. Перша маса характеризується моментом інерції J1, на яку діють момент двигуна М та статичний момент Мс1. На другу масу, яка має момент інерції J2 , діє статичний момент Мс2

Кінетична енергія даної системи дорівнює
![]() ,
потенціальна -
,
потенціальна -
![]() ,
дисипації - WД=0. Рівняння Лагранжа
складається для кожної маси. Для першої
маси похідна потенціальної енергії за
кутом становить
,
дисипації - WД=0. Рівняння Лагранжа
складається для кожної маси. Для першої
маси похідна потенціальної енергії за
кутом становить
![]()
а похідна кінетичної енергії за швидкістю дорівнює
![]()
Узагальнена сила
![]()
Після їх підстановки у (1) отримується рівняння руху першої маси механічної частини електропривода
![]() або
або
![]()
Аналогічно для другої маси похідна потенціальної енергії за кутом
![]()
та похідна кінетичної енергії за швидкістю становлять
![]()
Узагальнена сила дорівнює
![]()
і рівняння руху другої маси має вигляд
![]() або
або
![]()
У рівняннях руху обох мас момент
![]()
є пружним моментом їх взаємодії. Похідна пружного моменту становить
![]()
Наведені рівняння описують рух механічної частини електропривода, представленої двомасовою розрахунковою схемою
![]()

![]()
![]()
На їх основі складається структурна схема кожної ланки та системи в цілому

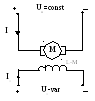
Узагальнена схема увімкнення двигуна постійного струму з незалежним збудженням приведена нижче на рисунку. Обмотка збудження ОЗ підключається до джерела живлення з напругою збудження Uз, під дією якої через обмотку протікає струм збудження Із. Обмотку якоря ОЯ увімкнено на напругу якоря U, яка обумовлює струм якоря І. В коло якоря може бути включено додатковий резистор з електричним опором Rд.

Згідно до закону Кірхгофа напруга, яка прикладена до кола якоря двигуна врівноважується падінням напруги та електрорушійною силою ЕРС
![]() ,
(2)
,
(2)
де ![]() – ЕРС двигуна;
(3)
– ЕРС двигуна;
(3)
![]() – конструкційна стала двигуна;
– конструкційна стала двигуна;
р – число пар полюсів;
N – число активних провідників обмотки якоря;
а – число паралельних гілок обмотки якоря;
Ф – магнітний потік, який створює обмотка збудження;
![]() – сумарний електричний опір якірного
кола;
– сумарний електричний опір якірного
кола;
![]() – електричний опір якірного кола;
– електричний опір якірного кола;
![]() –
електричні опори обмотки якоря, додаткових
–
електричні опори обмотки якоря, додаткових
полюсів, компенсаційної обмотки та щіток.
Момент двигуна визначається простою залежністю
![]() .
(4)
.
(4)
Таким чином, ЕРС двигуна (3) пропорційна магнітному потоку та швидкості двигуна, а момент (4) – потоку та струму якоря.
З формули (3) з урахуванням (2) знаходиться швидкість двигуна
![]() .
(5)
.
(5)
Отримана залежність (5) швидкості двигуна від струму якоря називається електромеханічною характеристикою двигуна =f(І). Після підстановки в (5) значення струму з (4) знаходиться рівняння механічної характеристики двигуна =f(M)
![]() (6)
(6)
або у такому вигляді
![]()
чи у наступному
![]()
де ![]() – швидкість ідеального холостого ходу
(М=0);
– швидкість ідеального холостого ходу
(М=0);
![]() – жорсткість механічної характеристики;
– жорсткість механічної характеристики;
![]() – падіння швидкості.
– падіння швидкості.
Швидкість ідеального холостого
ходу 0
пропорційна напрузі якоря U та обернено
пропорційна магнітному потоку Ф.
Жорсткість механічної характеристики
пропорційна квадрату
магнітного потоку Ф та обернено
пропорційна сумарному електричному
опору кола якоря Rя.
Механічна характеристика характеризується
також статизмом – величиною оберненою
до жорсткості механічної характеристики
![]() .
Падіння швидкості
визначається статичним моментом М=Мс
та жорсткістю характеристики й називається
статичною похибкою – це відхилення
від швидкості ідеального холостого
ходу під дією статичного моменту. Часто
статична похибка представляється у
відсотках (/0)100%
і при номінальному моменті для двигунів
звичайного виконання знаходиться в
межах 26%. Механічна
(6) та електромеханічна (5) характеристики
представляють собою рівняння прямих
виду y=a-bx, тому для їх побудови
достатньо взяти дві точки. Найчастіше
беруться точки ідеального холостого
ходу =0,
М=0 (І=0) та номінальна =н,
М=Мн (І=Ін) або точки ідеального
холостого ходу =0,
М=0 (І=0) та короткого замикання (пускова)
=0, М=Мкз,
(І=Ікз), де Iкз=U/Rя
– струм короткого замикання (пусковий
струм); Мкз=сФIкз=сФU/Rя
– момент короткого замикання (пусковий
момент). Механічна характеристика (6)
двигуна з незалежним збудженням
представлена на рисунку
.
Падіння швидкості
визначається статичним моментом М=Мс
та жорсткістю характеристики й називається
статичною похибкою – це відхилення
від швидкості ідеального холостого
ходу під дією статичного моменту. Часто
статична похибка представляється у
відсотках (/0)100%
і при номінальному моменті для двигунів
звичайного виконання знаходиться в
межах 26%. Механічна
(6) та електромеханічна (5) характеристики
представляють собою рівняння прямих
виду y=a-bx, тому для їх побудови
достатньо взяти дві точки. Найчастіше
беруться точки ідеального холостого
ходу =0,
М=0 (І=0) та номінальна =н,
М=Мн (І=Ін) або точки ідеального
холостого ходу =0,
М=0 (І=0) та короткого замикання (пускова)
=0, М=Мкз,
(І=Ікз), де Iкз=U/Rя
– струм короткого замикання (пусковий
струм); Мкз=сФIкз=сФU/Rя
– момент короткого замикання (пусковий
момент). Механічна характеристика (6)
двигуна з незалежним збудженням
представлена на рисунку

Електромеханічна характеристика =f(І) (5) має аналогічний вигляд. Кожен двигун має природну механічну характеристику, яка відповідає його увімкненню на номінальну напругу якоря Uн із номінальним магнітним потоком Фн й без додаткового опору в колі якоря Rд=0, та довільну кількість штучних механічних характеристик. Останні використовуються для зміни режимів роботи двигуна та для керування його координат, в тому числі швидкості.
Керування швидкості двигунів характеризується діапазоном керування, як відношенням максимальної швидкості до мінімальної
![]()
Згідно з рівнянням механічної характеристики (6) є три способи керування швидкості двигуна з незалежним збудженням , а саме:
-
зміною напруги якоря U;
-
зміною магнітного потоку Ф;
-
зміною сумарного електричного опору якірного кола Rя, за рахунок увімкнення додаткового резистора з опором Rд.
1) Керування швидкості за рахунок зміни напруги якоря є найбільш ефективним та поширеним способом, який забезпечує плавне керування швидкості в широкому діапазоні. В розімкнутих системах діапазон складає 10-100, а в замкнених 1000-10000. Для реалізації способу керування обмотка якоря живиться від силового перетворювача: керованого випрямляча, широтно-імпульсного перетворювача, генератора постійного струму, електромашинного підсилювача тощо. Часто електроприводи саме й розділяються за схемою силової частини якірного кола, наприклад, якщо двигун живиться від генератора, то система називається Г-Д (генератор-двигун), а якщо від тиристорного перетворювача, то ТП-Д і так далі. Для керування силовим перетворювачем використовуються стандартизовані аналогові рівні напруги завдання Uзавд від 0 до 10 В або струму завдання Iзавд від 0 до 40 мА. У промислових умовах силовий перетворювач найчастіше живиться від трифазної мережі з напругою 380 В, створюючи ЕРС перетворювача Еп

Обмотка збудження живиться незмінним номінальним струмом Ізн. Керування швидкості двигуна здійснюється напругою завдання Uзавд, якій пропорційно змінюється напруга якоря U, що надходить від перетворювача. Силовий перетворювач не є ідеальним і має внутрішній опір Rп, тому напруга якоря дорівнює
![]()
Після підстановки цього виразу у рівняння механічної характеристики двигуна (6) отримується рівняння механічної характеристики для випадку живлення обмотки якоря від силового перетворювача

З рівняння видно, що жорсткість характеристики зменшилася, бо знаменник збільшився на величину внутрішнього опору перетворювача

При керуванні швидкості ЕРС перетворювача Еп змінюється від нуля і до максимального значення Епmax. При цьому ЕРС не впливає на жорсткість штучних механічних характеристик β, тому всі вони паралельні між собою. Швидкість ідеального холостого ходу ω0 змінюється пропорційно ЕРС перетворювача. Сімейство відповідних штучних механічних характеристик та природна характеристика двигуна представлені на рисунку. Робочі точки на кожній характеристиці визначаються перетином із прямою статичного моменту Мс.

Перевагами цього способу керування є плавна зміна швидкості від нуля і до max при незмінній жорсткості характеристик та високому ККД усієї системи. Найчастіше максимальна швидкість дорівнює номінальній max=н і визначається стійкістю електричної ізоляції обмотки якоря. Область зміни швидкості двигуна від нуля і до номінальної називається “перша зона керування”. У всій цій області тривалий допустимий момент двигуна дорівнює номінальному, бо момент не залежить від ЕРС перетворювача Мдоп=СФнІн=Мн, тому цей спосіб керування швидкістю називається “керування з незмінним моментом”.
Недоліками є відносна складність та висока вартість перетворювача. Крім того, при незначних навантаженнях, тобто при незначних струмах якоря, може виникнути режим перериваних струмів, обумовлених пульсуючим характером ЕРС перетворювача. Це призводить також до погіршення умов роботи колектора та генерації перешкод до мережі. Указані недоліки визначаються якістю силового перетворювача.
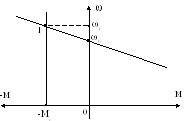
2) Керування швидкості за рахунок зміни магнітного потоку здійснюється тільки при зменшенні потоку відносно номінального Фн. Це пояснюється тим, що при проектуванні двигунів для отримання раціональних масогабаритних показників точка номінального магнітного потоку, якій відповідає номінальний струм збудження Ізн, вибирається близькою до потоку насичення, тому суттєво збільшити магнітний потік неможливо

Так як, магнітний потік буде менше номінального, то для спрощення аналізу реальна крива намагнічування Ф=f(IЗ) на робочій ділянці замінюється прямою, проведеною через початок координат та номінальну точку. Після цього магнітний потік визначається виразом
![]()
де ![]() – коефіцієнт кола збудження.
– коефіцієнт кола збудження.
Як видно з формули, магнітний потік можна змінювати не тільки за допомогою напруги збудження Uз, а й за рахунок збільшення електричного опору кола Rз шляхом увімкнення додаткового резистора Rз=Rоз+Rд. Для реалізації способу керування обмотка збудження найчастіше підключається до регульованого джерела постійного струму
Зменшення магнітного потоку призводить до пропорційного збільшення швидкості ідеального холостого ходу ω0 та до зменшення моменту короткого замикання Мкз, а також до зменшення у квадраті від потоку жорсткості характеристик β. Сімейство штучних механічних характеристик представлено на рисунку

Характерним для штучних електромеханічних характеристик є незмінне значення струму короткого замикання Ікз=Uн/Rя, тому всі характеристики проходять через одну точку

Перевагами
способу керування є плавна зміна
швидкості з невеликими втратами на
керування, так як потужність кола
збудження на порядок менша потужності
якірного кола. Діапазон керування
швидкості складає 3-5. Недоліками є
можливість керування швидкості тільки
вище за номінальну (при номінальній
напрузі якоря), зменшення жорсткості
характеристик і допустимого тривалого
моменту нижче номінального
![]() так як Ф<Фн, тому двигун
не можна навантажувати на повний момент.
Проте, допустима тривала потужність
залишається незмінною
так як Ф<Фн, тому двигун
не можна навантажувати на повний момент.
Проте, допустима тривала потужність
залишається незмінною
![]()
і двигун можна навантажувати на повну потужність, тому цей спосіб керування швидкості називається “керування з постійною потужністю”. Область зміни швидкості двигуна від номінальної і вище за рахунок зменшення потоку називається “друга зона керування”. Даний спосіб застосовується в комбінації з іншими, в т.ч. при зміні напруги якоря в системах “двозонного керування” і широко використовується в електроприводах верстатів, прокатних станів, намотувальних та шліфувальних механізмів, де вимагається розширений діапазон зміни швидкості.
3) Керування швидкості за рахунок увімкнення додаткового резистора в коло якоря в теперішній час застосовується рідко, так як пов'язане зі значними втратами енергії. Опір додаткового резистора за умовою комутації значного струму якоря змінюється не плавно, а ступенями шляхом замикання секцій реостата R1–R3 за допомогою силових контактів K1–K3 відповідних контакторів схеми керування

Обмотки якоря та збудження увімкнено
на номінальні напруги. Швидкість
ідеального холостого ходу 0
не залежить від опору якірного кола
![]() ,
тому всі штучні характеристики проходять
через цю точку. Жорсткість механічних
характеристик β та момент короткого
замикання Мкз зменшуються із
збільшенням опору додаткового резистора
Rд.
,
тому всі штучні характеристики проходять
через цю точку. Жорсткість механічних
характеристик β та момент короткого
замикання Мкз зменшуються із
збільшенням опору додаткового резистора
Rд.

Усталені швидкості в робочих точках визначаються навантаженням, тобто статичним моментом Мс. Перевагою способу керування є простота його реалізації. Недоліки полягають у зміні швидкості тільки ступенями, зменшенні жорсткості штучних механічних характеристик і відповідному збільшенні втрат

Згідно формули, якщо відносне падіння швидкості /0=0,5, тобто швидкість зменшилася вдвічі, то втрати складають 50% від вхідної електричної потужності. Тому даний спосіб використовується при невеликому близько 2-4 діапазоні керування швидкості.
Для зміни напрямку моменту М=сФІ двигуна (4) та відповідно швидкості є два способи:
1) Зміна напрямку магнітного потоку Ф;
2) Зміна напрямку струму якоря І .
Для цього достатньо змінити полярність напруги збудження Uз чи напруги якоря U. Індуктивність обмотки збудження набагато більша за індуктивність обмотки якоря, тому при реверсі струм якоря змінюється значно швидше за струм збудження, і, отже, реверс за якорем здійснюється за менший час й використовується у швидкодіючих ЕП, а реверс за полем – при відсутності жорстких вимог до часу реверса. Реверс за полем пов’язаний з меншими енергетичними витратами, так як струм збудження на порядок менше струму якоря.

Механічні характеристики для зворотного напрямку руху знаходяться в ІІІ та ІV квадрантах симетрично відносно початку координат характеристикам прямого напрямку руху. При реактивному статичному моменті Мс двигун обертається у зворотному напрямку із швидкістю -1.

Режими гальмування є нормальними режимами роботи двигуна. Вони широко застосовуються для ефективного керування рухом механізму. У гальмівних режимах момент двигуна не співпадає за напрямком із швидкістю. Двигун може знаходитись при гальмуванні в статичному режимі чи в перехідному процесі. Це залежить від типу статичного моменту, який створює механізм, та режиму роботи двигуна. Двигун із незалежним збудженням забезпечує наступні режими гальмування:
-
Рекуперативне (генераторне) гальмування;
-
Гальмування противмиканням;
-
Динамічне гальмування.
1) Двигун переходить у режим рекуперативного гальмування, якщо його ЕРС більша за напругу живлення якоря E >U. При цьому струм якоря, який знаходиться з (2)
![]()
і відповідно момент двигуна (4) М=сФІ змінюють свій напрямок, тому швидкість двигуна у режимі рекуперативного гальмування більша за швидкість ідеального холостого ходу >0, так як >0. Рівняння механічної характеристики двигуна (6) для режиму рекуперативного гальмування приймає вигляд
![]()
Якщо механізм створює активний момент (сили тяжіння, вітру тощо), то він може розігнати двигун вище швидкості ідеального холостого ходу, перетворюючи двигун у генератор, який працює паралельно з мережею. При цьому двигун знаходиться в статичному режимі в робочій точці 1, обертаючись із швидкістю 1
Двигун може переходити в режим рекуперативного гальмування в перехідному процесі, наприклад, при зменшенні стрибком напруги якоря від значення U1 до U2. При цьому активний момент створюється силами інерції. До перехідного процесу двигун знаходиться в робочій точці 1, маючи швидкість 1. Після зниження напруги до рівня U2 двигун повинен перейти в робочу точку 4 на новій штучній характеристиці, обертаючись із швидкістю 4. Так як швидкість миттєво змінитися не може, то двигун із точки 1 спочатку переходить у точку 2, а потім по новій штучній характеристиці сповільнюється до швидкості 4

На ділянці 2-3 механічної характеристики двигун сповільнюється в режимі рекуперативного гальмування, бо його швидкість більша за швидкість ідеального холостого ходу 02, а вже на ділянці 3-4 сповільнення продовжується в рушійному режимі. Найчастіше напруга якоря змінюється за допомогою силового перетворювача, тому для реалізації рекуперативного гальмування його електрична схема повинна забезпечувати роботу двигуна в І і ІІ квадрантах для нереверсивного ЕП та у всіх чотирьох квадрантах для реверсивного. В режимі рекуперативного гальмування механічна енергія від механізму, за винятком втрат, перетворюється в електричну енергію і може бути повернена в мережу. Цим визначається висока економічність даного способу гальмування. Крім того, перевагою є можливість гальмування механізмів на швидкостях близьких до швидкості ідеального холостого ходу двигуна. В основному режим рекуперативного гальмування застосовується для потужних електроприводів.
2) Гальмування противмиканням у статичному режимі можна отримати, якщо механізм створює активний статичний момент, наприклад, сила тяжіння у підйомному механізмі. Для цього в коло якоря вмикається додатковий резистор Rд такої величини, що двигун із робочої точки 1 в І квадранті переходить у точку 3 гальмівного квадранта ІV, тобто падіння швидкості стає більшим за швидкість ідеального холостого ходу >|0|

Рівняння механічної характеристики має звичний вид (6), проте з урахуванням величини швидкість двигуна змінює знак
![]()
В точці 3 двигун працює в режимі гальмування противмиканням, опускаючи вантаж з усталеною швидкістю 3, значення якої задається величиною додаткового опору Rд

Наприклад, при величині Rд=R2 робоча точка знаходиться на осі абсцис і швидкість дорівнює нулю, тобто двигун своїм моментом втримує вантаж у нерухомому стані.
Режим гальмування противмиканням можна отримати і в перехідному процесі, якщо здійснити реверс працюючого двигуна. При цьому струм якоря може досягти небезпечних значень, так як напруга якоря та ЕРС діють в одному напрямку
![]()
тому для обмеження струму в коло якоря на час гальмування вмикається додатковий резистор Rд, щоб збільшити знаменник формули
![]()
При реактивному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю 1

Для гальмування механізму здійснюється реверс двигуна з додатковим опором у колі якоря Rд=R1. Так як швидкість змінитися миттєво не може, то двигун переходить у точку 2 на новій штучній характеристиці, яка знаходиться у ІІ гальмівному квадранті, і починає сповільнюватися. На ділянці характеристики 2-3 двигун працює в режимі гальмування противмиканням. Максимальний гальмівний момент Мmax задається величиною опору Rд, впливаючи на жорсткість характеристики . Якщо при нульовій швидкості двигуна в точці 3 його момент буде менше статичного моменту М3Мс, то двигун зупиниться. Якщо ж М3>Мс, то двигун почне розганятися у зворотному напрямку. В обох випадках у точці 3 двигун потрібно відключити від мережі.
У випадку активного статичного моменту Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю 1. При реверсі двигун із робочої точки 1 переходить у точку 2 на новій штучній характеристиці, так як швидкість змінитися миттєво не може. На ділянці характеристики 2-3 двигун сповільнюється в режимі гальмування противмиканням, прагнучи до нової робочої точки 5. В точці 3 двигун зупиниться і його потрібно відімкнути від мережі, інакше двигун почне розганятися у зворотному напрямку на ділянці 3-4 у рушійному режимі, а на ділянці 4-5 у режимі рекуперативного гальмування.

В режимі гальмування противмиканням двигун споживає електричну енергію від мережі та механічну енергію від механізму. Усі вони перетворюються в тепло у двигуні та додатковому резисторі, тому з точки зору енергетики цей режим найменш ефективний, проте з точки зору керування рухом цей режим дуже ефективний, бо дозволяє створювати значні моменти гальмування, в тому числі й при низьких швидкостях. Режим гальмування противмиканням широко використовується в механізмах із частими пусками та зупинками.
3) Для організації режиму динамічного гальмування обмотка якоря відключається від мережі і замикається на додатковий резистор Rд. Обмотка збудження обов’язково повинна залишатися увімкненою у мережу.

Рівняння механічної характеристики для режиму динамічного гальмування знаходиться із загального рівняння характеристики, якщо до нього підставити U=0

Так як 0=0, то механічні характеристики проходять через початок координат. Нахил характеристик, тобто жорсткість , визначається величиною Rд, а також величиною магнітного потоку Ф

При реактивному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю 1. Для гальмування механізму здійснюється перемикання обмотки якоря на додатковий опір Rд=R1. Так як швидкість змінитися миттєво не може, то двигун переходить у точку 2 на новій штучній характеристиці, яка знаходиться у ІІ гальмівному квадранті. Двигун сповільнюється в режимі динамічного гальмування на ділянці характеристики 2-3 і обов’язково зупиняється в початку координат. Максимальний гальмівний момент Мmax задається величиною опору Rд.
При активному статичному моменті Мс до початку гальмування двигун працює в робочій точці 1 із швидкістю 1. При гальмуванні двигун із робочої точки 1 переходить у точку 2 на новій штучній характеристиці, яка визначається величиною додаткового опору Rд=R2. Максимальний гальмівний момент дорівнює Мmax2. На ділянці характеристики 2-0 двигун сповільнюється, а на ділянці 0-5 розганятися в режимі динамічного гальмування до робочої точки 5, в якій двигун буде працювати в статичному режимі з усталеною швидкістю 5. Якщо увімкнути резистор із меншим опором R1<R2, то максимальний гальмівний момент буде більшим Мmax3>Мmax2, а усталена швидкість меншою 4<5.

В режимі динамічного гальмування механічна енергія, яка поступає від механізму, перетворюється у двигуні та додатковому резисторі в тепло. Цей режим гальмування достатньо ефективний з точки зору енергетики й керування рухом, тому він найбільш розповсюджений. Недоліком є незначний гальмівний момент на низьких швидкостях.
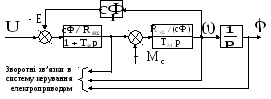
На основі передаточних функцій електромеханічного перетворювача двигуна з незалежним збудженням та механічної частини двигуна у вигляді одномасової схеми отримується структурна схема двигуна в цілому. Як видно з рисунка, електромеханічний перетворювач є нелінійним при лінеарізованому колі збудження, бо містить функцію множення змінних при створенні моменту М та ЕРС двигуна Е. Коло збудження не залежить від кола якоря, а коло якоря залежить від кола збудження через магнітний потік Ф, тому між механічною частиною та електромеханічним перетворювачем існує електромеханічний зв’язок, обумовлений ЕРС двигуна (точка 2). Вихідною величиною електромеханічного перетворювача є електромагнітний момент М (точка 1), який діє на механічну частину. В залежності від виду механічної частини (одномасова, двомасова, із зазором тощо) до точок 1 та 2 електромеханічного перетворювача підключаються відповідні структурні схеми.

Найчастіше при живленні якоря від джерела напруги, тобто при керуванні швидкістю за допомогою напруги якоря, магнітний потік двигуна не змінюється і встановлюється номінальним Ф=Фн=const за рахунок живлення обмотки збудження номінальною напругою Uзн=const. В цьому випадку електромеханічний перетворювач стає лінійним і структурна схема двигуна значно спрощується.

Якщо інформація про струм якоря не потрібна, то коефіцієнт СФ переноситься до передаточної функції кола якоря.

Тривалість механічного перехідного процесу у двигуні, тобто при одномасовій розрахунковій схемі, характеризується електромеханічною сталою часу
![]()
Значення електромеханічної сталої лежить у межах Тм=(0,082) с і залежить від моменту інерції J, електричного опору кола якоря RяΣ та магнітного потоку Ф. Якщо електромеханічну сталу ввести в механічну частину, то структурна схема приймає вигляд

При синтезі замкнених систем керування електропривода використовуються зворотні зв’язки за швидкістю, положенням та струмом якоря. Останній пропорційний моменту двигуна, так як момент виміряти дуже складно. В цьому випадку використовується наступна структурна схема
Живлення двигуна від джерела напруги при незмінному магнітному потоці Ф=const забезпечує високу швидкодію, яка визначається електромагнітною сталою часу якоря Тя. Це справедливо для двигунів з компенсаційною обмоткою. Якщо ж двигун некомпенсований, то внаслідок реакції якоря магнітний потік при зміні струму якоря може зменшуватися на 10-20%. При цьому швидкодія значно знижується, бо основний потік Ф змінюється зі сталою часу кола збудження Тз>>Тя.
ДОМАШНЯ РОБОТА № 2
-
Розрахувати відповідно до даних табл. 10 параметри й зобразити Г-подібну схему заміщення фази асинхронного двигуна.
-
Дати визначення природної механічної характеристики асинхронного двигуна.
-
Розрахувати й побудувати в І й ІІ квадрантах природну механічну характеристику асинхронного двигуна в координатах =f(M) й s=f(M). Позначити характерні точки характеристики.
Таблиця 10. Номінальні дані асинхронних двигунів серії 4АНК
|
Варіант |
Потужність Рн, кВт |
Частота напруги fн, Гц |
Напруга статора U1н, В |
Ковзання sн, % |
ККД % |
Cos |
ЕРС ротора Е2н, В |
Струм ротора I2н, А |
|
1 |
14 |
50 |
380 |
5 |
86,5 |
0,85 |
330 |
27 |
|
2 |
17 |
50 |
380 |
5 |
88 |
0,87 |
315 |
34 |
|
3 |
22 |
50 |
380 |
5,5 |
87 |
0,86 |
300 |
43 |
|
4 |
30 |
50 |
380 |
4,5 |
88 |
0,81 |
290 |
63 |
|
5 |
37 |
50 |
380 |
3 |
90 |
0,88 |
360 |
62 |
|
6 |
45 |
50 |
380 |
3,5 |
90 |
0,88 |
375 |
75 |
|
7 |
55 |
50 |
380 |
4 |
89,5 |
0,87 |
170 |
200 |
|
8 |
75 |
50 |
380 |
4,5 |
90 |
0,88 |
180 |
250 |
|
9 |
90 |
50 |
380 |
4 |
91,5 |
0,87 |
220 |
260 |
|
10 |
110 |
50 |
380 |
3,5 |
92 |
0,90 |
250 |
260 |
|
11 |
13 |
50 |
380 |
7 |
83,5 |
0,81 |
205 |
42 |
|
12 |
17 |
50 |
380 |
6 |
85 |
0,82 |
335 |
32,5 |
|
13 |
22 |
50 |
380 |
3,5 |
88 |
0,81 |
380 |
37 |
|
14 |
30 |
50 |
380 |
4 |
88,5 |
0,82 |
375 |
46 |
|
15 |
37 |
50 |
380 |
4 |
89 |
0,86 |
140 |
180 |
|
16 |
45 |
50 |
380 |
4 |
89,5 |
0,86 |
155 |
200 |
|
17 |
55 |
50 |
380 |
3,5 |
91 |
0,88 |
190 |
185 |
|
18 |
75 |
50 |
380 |
3 |
91,5 |
0,85 |
250 |
200 |
|
19 |
90 |
50 |
380 |
3,6 |
90 |
0,88 |
202 |
277 |
|
20 |
110 |
50 |
380 |
3,6 |
91,5 |
0,87 |
230 |
297 |
|
21 |
11 |
50 |
380 |
5 |
85 |
0,72 |
315 |
22,5 |
|
22 |
14 |
50 |
380 |
4,5 |
86,5 |
0,69 |
310 |
28 |
|
23 |
22 |
50 |
380 |
4,5 |
87 |
0,79 |
330 |
40 |
|
24 |
30 |
50 |
380 |
5 |
86,5 |
0,80 |
120 |
165 |
|
25 |
37 |
50 |
380 |
5,5 |
87,5 |
0,80 |
115 |
190 |
|
26 |
45 |
50 |
380 |
4 |
89 |
0,82 |
140 |
190 |
|
27 |
55 |
50 |
380 |
3,5 |
89,5 |
0,83 |
190 |
185 |
|
28 |
75 |
50 |
380 |
4 |
90,5 |
0,84 |
190 |
257 |
|
29 |
90 |
50 |
380 |
4 |
90,5 |
0,84 |
214 |
267 |
|
30 |
110 |
50 |
380 |
3,5 |
91,5 |
0,84 |
225 |
311 |
Продовження таблиці 10
|
Варіант |
Число полюсів 2p |
Мк/Мн |
Опір R1, Ом |
Опір R2, Ом |
Опір Х1, Ом |
Опір X2, Ом |
Опір X, Ом |
Момент інерції J, кг*м2 |
|
1 |
4 |
3 |
0,1032 |
0,3528 |
0,7222 |
0,5431 |
17,641 |
0,57 |
|
2 |
4 |
3,5 |
0,0682 |
0,2674 |
0,5115 |
0,3505 |
13,907 |
0,62 |
|
3 |
4 |
3,2 |
0,0580 |
0,2215 |
0,4689 |
0,2914 |
10,876 |
0,89 |
|
4 |
4 |
3,2 |
0,0380 |
0,1196 |
0,3323 |
0,1930 |
7,441 |
1,04 |
|
5 |
4 |
3 |
0,0306 |
0,1006 |
0,2926 |
0,2619 |
9,722 |
1,53 |
|
6 |
4 |
3 |
0,0222 |
0,1010 |
0,2330 |
0,2263 |
8,660 |
2,2 |
|
7 |
4 |
2,5 |
0,0202 |
0,0196 |
0,2359 |
0,0471 |
1,521 |
2,8 |
|
8 |
4 |
2,3 |
0,0149 |
0,0187 |
0,1962 |
0,0439 |
1,330 |
3,5 |
|
9 |
4 |
2,5 |
0,0094 |
0,0195 |
0,1412 |
0,0472 |
1,612 |
3,65 |
|
10 |
4 |
2,5 |
0,0071 |
0,0194 |
0,1247 |
0,0538 |
1,887 |
3,83 |
|
11 |
6 |
3 |
0,1068 |
0,1973 |
0,7473 |
0,2169 |
6,481 |
0,95 |
|
12 |
6 |
3 |
0,0791 |
0,3571 |
0,5932 |
0,4597 |
14,283 |
1,05 |
|
13 |
6 |
3 |
0,0571 |
0,2075 |
0,4611 |
0,4598 |
14,824 |
1,5 |
|
14 |
6 |
3 |
0,0431 |
0,1883 |
0,3772 |
0,3663 |
12,237 |
1,7 |
|
15 |
6 |
1,9 |
0,0453 |
0,0180 |
0,4331 |
0,0586 |
1,212 |
2,8 |
|
16 |
6 |
2,3 |
0,0269 |
0,0179 |
0,2830 |
0,0470 |
1,253 |
4,5 |
|
17 |
6 |
2,5 |
0,0195 |
0,0208 |
0,2282 |
0,0569 |
1,720 |
4,8 |
|
18 |
6 |
2,5 |
0,0122 |
0,0217 |
0,1610 |
0,0695 |
2,165 |
5,6 |
|
19 |
6 |
1,9 |
0,0131 |
0,0152 |
0,1974 |
0,0556 |
1,305 |
10,7 |
|
20 |
6 |
1,9 |
0,0092 |
0,0161 |
0,1621 |
0,0592 |
1,431 |
11,5 |
|
21 |
8 |
3,2 |
0,1210 |
0,4041 |
0,8470 |
0,5804 |
17,782 |
1,48 |
|
22 |
8 |
3,5 |
0,0841 |
0,2876 |
0,6311 |
0,4188 |
14,702 |
1,7 |
|
23 |
8 |
2,5 |
0,0742 |
0,2143 |
0,5994 |
0,4508 |
11,432 |
2,4 |
|
24 |
8 |
1,8 |
0,0670 |
0,0210 |
0,5868 |
0,0584 |
1,050 |
3,5 |
|
25 |
8 |
2,2 |
0,0441 |
0,0192 |
0,4209 |
0,0384 |
0,909 |
4,8 |
|
26 |
8 |
2,2 |
0,0330 |
0,0170 |
0,3469 |
0,0469 |
1,149 |
4,9 |
|
27 |
8 |
2,2 |
0,0225 |
0,0208 |
0,2633 |
0,0656 |
1,660 |
5,5 |
|
28 |
8 |
1,9 |
0,0172 |
0,0171 |
0,2255 |
0,0562 |
1,238 |
12,8 |
|
29 |
8 |
1,9 |
0,0129 |
0,0185 |
0,1933 |
0,0611 |
1,388 |
14 |
|
30 |
8 |
1,9 |
0,0090 |
0,0146 |
0,1583 |
0,0553 |
1,295 |
16,8 |
-
Описати та пояснити за допомогою механічних характеристик й функціональних схем способи керування швидкістю асинхронного двигуна. Привести переваги та недоліки кожного способу.
-
Побудувати в І-му квадранті природну та штучні механічні характеристики =f(M) й s=f(M) при зміні напруги статора відповідно до даних табл. 11. Нанести робочі точки відповідно до даних табл. 12 та визначити швидкості двигуна.
-
Побудувати в І-му квадранті природну та штучні механічні характеристики =f(M) при зміні напруги статора відповідно до даних табл. 11 одночасно із зміною частоти за законом керування U/f=const. Нанести робочі точки відповідно до даних табл. 12 й визначити швидкості двигуна.
-
Побудувати в І-му квадранті природну та штучні механічні характеристики =f(M) при зміні напруги статора відповідно до даних табл. 11 одночасно із зміною частоти за законом керування U/f2=const. Нанести робочі точки відповідно до даних табл. 12 й визначити швидкості двигуна.
-
Побудувати в І-му квадранті природну та штучні механічні характеристики =f(M) й s=f(M) при зміні електричного опору кола ротора відповідно до даних табл. 13. Нанести робочі точки відповідно до даних табл. 12 й визначити швидкості двигуна.
-
Описати та пояснити за допомогою механічних характеристик й функціональних схем способи гальмування асинхронного двигуна. Привести переваги та недоліки кожного способу.
-
Обчислити величину постійного струму статора, що забезпечує заданий у табл. 14 початковий момент динамічного гальмування з робочих точок пункту завдання 5. Схема з’єднання обмоток статора вибирається самостійно. Побудувати відповідні механічні характеристики та функціональні схеми.
-
Обчислити величину додаткового електричного опору в колі ротора, що забезпечує заданий у табл. 14 початковий момент гальмування противмиканням із робочих точок пункту завдання 6. Обчислити значення моментів короткого замикання. Побудувати відповідні механічні характеристики та функціональні схеми.
-
Описати та пояснити за допомогою функціональних схем й механічних характеристик способи зміни напрямку руху асинхронного двигуна.
-
Обчислити параметри та зобразити структурну схему узагальненого електромеханічного перетворювача на основі асинхронного двигуна з механічною частиною у вигляді одномасової розрахункової схеми на основі результатів пунктів 1, 3 домашнього завдання.
-
Отримати й проаналізувати графік перехідного процесу швидкості й моменту двигуна разом із керуючим сигналом, який змінюється за лінійним законом відповідно до даних табл. 15, при пуску та реверсі зі статичним моментом згідно табл. 12. Обчислити й показати на графіках динамічну, статичну й сумарну похибку на всіх етапах усталеного динамічного та статичного процесу. (У табл. 15 коефіцієнт К дорівнює найближчому до моменту інерції двигуна натуральному числу).
Таблиця 11. Значення напруги статора
|
Варіант |
Напруга статора |
Варіант |
Напруга статора |
||||
|
1 |
0,91*Uн |
0,81*Uн |
0,71*Uн |
16 |
0,86*Uн |
0,76*Uн |
0,68*Uн |
|
2 |
0,92*Uн |
0,82*Uн |
0,72*Uн |
17 |
0,87*Uн |
0,77*Uн |
0,69*Uн |
|
3 |
0,93*Uн |
0,83*Uн |
0,73*Uн |
18 |
0,88*Uн |
0,78*Uн |
0,70*Uн |
|
4 |
0,94*Uн |
0,84*Uн |
0,74*Uн |
19 |
0,89*Uн |
0,79*Uн |
0,71*Uн |
|
5 |
0,95*Uн |
0,85*Uн |
0,75*Uн |
20 |
0,90*Uн |
0,80*Uн |
0,72*Uн |
|
6 |
0,96*Uн |
0,86*Uн |
0,76*Uн |
21 |
0,91*Uн |
0,81*Uн |
0,73*Uн |
|
7 |
0,97*Uн |
0,87*Uн |
0,77*Uн |
22 |
0,92*Uн |
0,82*Uн |
0,74*Uн |
|
8 |
0,88*Uн |
0,78*Uн |
0,68*Uн |
23 |
0,93*Uн |
0,83*Uн |
0,75*Uн |
|
9 |
0,89*Uн |
0,79*Uн |
0,69*Uн |
24 |
0,94*Uн |
0,84*Uн |
0,76*Uн |
|
10 |
0,90*Uн |
0,80*Uн |
0,70*Uн |
25 |
0,95*Uн |
0,85*Uн |
0,77*Uн |
|
11 |
0,81*Uн |
0,71*Uн |
0,71*Uн |
26 |
0,86*Uн |
0,76*Uн |
0,68*Uн |
|
12 |
0,82*Uн |
0,72*Uн |
0,72*Uн |
27 |
0,87*Uн |
0,77*Uн |
0,69*Uн |
|
13 |
0,83*Uн |
0,73*Uн |
0,73*Uн |
28 |
0,88*Uн |
0,78*Uн |
0,70*Uн |
|
14 |
0,84*Uн |
0,74*Uн |
0,74*Uн |
29 |
0,89*Uн |
0,79*Uн |
0,71*Uн |
|
15 |
0,85*Uн |
0,75*Uн |
0,75*Uн |
30 |
0,90*Uн |
0,80*Uн |
0,72*Uн |
Таблиця 12. Значення та вид статичного моменту
|
Варіант |
Значення |
Вид |
Варіант |
Значення |
Вид |
|
1 |
0,60*Мн |
Реактивний |
16 |
0,65*Мн |
Активний |
|
2 |
0,59*Мн |
Активний |
17 |
0,66*Мн |
Реактивний |
|
3 |
0,58*Мн |
Реактивний |
18 |
0,67*Мн |
Активний |
|
4 |
0,57*Мн |
Активний |
19 |
0,58*Мн |
Реактивний |
|
5 |
0,56*Мн |
Реактивний |
20 |
0,59*Мн |
Активний |
|
6 |
0,55*Мн |
Активний |
21 |
0,60*Мн |
Реактивний |
|
7 |
0,54*Мн |
Реактивний |
22 |
0,61*Мн |
Активний |
|
8 |
0,53*Мн |
Активний |
23 |
0,69*Мн |
Реактивний |
|
9 |
0,69*Мн |
Реактивний |
24 |
0,68*Мн |
Активний |
|
10 |
0,68*Мн |
Активний |
25 |
0,67*Мн |
Реактивний |
|
11 |
0,67*Мн |
Реактивний |
26 |
0,66*Мн |
Активний |
|
12 |
0,66*Мн |
Активний |
27 |
0,65*Мн |
Реактивний |
|
13 |
0,65*Мн |
Реактивний |
28 |
0,64*Мн |
Активний |
|
14 |
0,64*Мн |
Активний |
29 |
0,66*Мн |
Реактивний |
|
15 |
0,63*Мн |
Реактивний |
30 |
0,67*Мн |
Активний |
Таблиця 13. Значення додаткового електричного опору
|
Варіант |
Додатковий опір |
Варіант |
Додатковий опір |
||||
|
1 |
0,10*Rн |
0,31*Rн |
0,61*Rн |
16 |
0,15*Rн |
0,35*Rн |
0,65*Rн |
|
2 |
0,11*Rн |
0,32*Rн |
0,62*Rн |
17 |
0,14*Rн |
0,36*Rн |
0,66*Rн |
|
3 |
0,12*Rн |
0,33*Rн |
0,63*Rн |
18 |
0,13*Rн |
0,37*Rн |
0,67*Rн |
|
4 |
0,13*Rн |
0,34*Rн |
0,64*Rн |
19 |
0,12*Rн |
0,38*Rн |
0,68*Rн |
|
5 |
0,14*Rн |
0,35*Rн |
0,65*Rн |
20 |
0,11*Rн |
0,39*Rн |
0,69*Rн |
|
6 |
0,15*Rн |
0,36*Rн |
0,66*Rн |
21 |
0,10*Rн |
0,36*Rн |
0,60*Rн |
|
7 |
0,16*Rн |
0,37*Rн |
0,67*Rн |
22 |
0,11*Rн |
0,37*Rн |
0,61*Rн |
|
8 |
0,17*Rн |
0,38*Rн |
0,68*Rн |
23 |
0,12*Rн |
0,38*Rн |
0,62*Rн |
|
9 |
0,18*Rн |
0,39*Rн |
0,69*Rн |
24 |
0,13*Rн |
0,39*Rн |
0,63*Rн |
|
10 |
0,19*Rн |
0,40*Rн |
0,60*Rн |
25 |
0,14*Rн |
0,40*Rн |
0,64*Rн |
|
11 |
0,20*Rн |
0,41*Rн |
0,61*Rн |
26 |
0,15*Rн |
0,41*Rн |
0,65*Rн |
|
12 |
0,19*Rн |
0,42*Rн |
0,62*Rн |
27 |
0,16*Rн |
0,42*Rн |
0,61*Rн |
|
13 |
0,18*Rн |
0,43*Rн |
0,63*Rн |
28 |
0,17*Rн |
0,43*Rн |
0,62*Rн |
|
14 |
0,17*Rн |
0,44*Rн |
0,64*Rн |
29 |
0,18*Rн |
0,44*Rн |
0,63*Rн |
|
15 |
0,16*Rн |
0,45*Rн |
0,65*Rн |
30 |
0,19*Rн |
0,45*Rн |
0,64*Rн |
Таблиця 14. Значення максимального моменту гальмування
|
Варіант |
Динамічне гальмування |
Гальмування проти-вмиканням |
Варіант |
Динамічне гальмування |
Гальмування проти-вмиканням |
|
1 |
-0,51*Mн |
-0,81*Mн |
16 |
-0,71*Mн |
-0,86*Mн |
|
2 |
-0,52*Mн |
-0,82*Mн |
17 |
-0,72*Mн |
-0,87*Mн |
|
3 |
-0,53*Mн |
-0,83*Mн |
18 |
-0,73*Mн |
-0,88*Mн |
|
4 |
-0,54*Mн |
-0,84*Mн |
19 |
-0,74*Mн |
-0,89*Mн |
|
5 |
-0,55*Mн |
-0,85*Mн |
20 |
-0,75*Mн |
-0,90*Mн |
|
6 |
-0,56*Mн |
-0,86*Mн |
21 |
-0,76*Mн |
-0,91*Mн |
|
7 |
-0,57*Mн |
-0,87*Mн |
22 |
-0,77*Mн |
-0,92*Mн |
|
8 |
-0,58*Mн |
-0,88*Mн |
23 |
-0,78*Mн |
-0,93*Mн |
|
9 |
-0,59*Mн |
-0,89*Mн |
24 |
-0,79*Mн |
-0,94*Mн |
|
10 |
-0,60*Mн |
-0,90*Mн |
25 |
-0,80*Mн |
-0,95*Mн |
|
11 |
-0,61*Mн |
-0,91*Mн |
26 |
-0,81*Mн |
-0,96*Mн |
|
12 |
-0,62*Mн |
-0,92*Mн |
27 |
-0,82*Mн |
-0,97*Mн |
|
13 |
-0,63*Mн |
-0,93*Mн |
28 |
-0,83*Mн |
-0,98*Mн |
|
14 |
-0,64*Mн |
-0,94*Mн |
29 |
-0,84*Mн |
-0,99*Mн |
|
15 |
-0,65*Mн |
-0,95*Mн |
30 |
-0,85*Mн |
-1,00*Mн |
Таблиця 15. Значення часу пуску та реверсу (секунди)
|
Варіант |
Пуск |
Реверс |
Варіант |
Пуск |
Реверс |
|
1 |
4*К |
8*К |
16 |
3*К |
6*К |
|
2 |
4*К |
8*К |
17 |
3*К |
6*К |
|
3 |
4*К |
8*К |
18 |
3*К |
6*К |
|
4 |
4*К |
8*К |
19 |
3*К |
6*К |
|
5 |
4*К |
8*К |
20 |
3*К |
6*К |
|
6 |
3*К |
6*К |
21 |
4*К |
8*К |
|
7 |
3*К |
6*К |
22 |
4*К |
8*К |
|
8 |
3*К |
6*К |
23 |
4*К |
8*К |
|
9 |
3*К |
6*К |
24 |
4*К |
8*К |
|
10 |
3*К |
6*К |
25 |
4*К |
8*К |
|
11 |
4*К |
8*К |
26 |
3*К |
6*К |
|
12 |
4*К |
8*К |
27 |
3*К |
6*К |
|
13 |
4*К |
8*К |
28 |
3*К |
6*К |
|
14 |
4*К |
8*К |
29 |
3*К |
6*К |
|
15 |
4*К |
8*К |
30 |
3*К |
6*К |
МЕТОДИЧНІ ВКАЗІВКИ ДО ДОМАШНЬОЇ РОБОТИ № 2
Асинхронний двигун (АД) є найпоширенішим двигуном серед усіх типів двигунів. Він має високу надійність, невеликі масу, габарити й вартість. Недоліком двигуна є незначний пусковий момент, споживання реактивної потужності, складні математичні залежності між його параметрами, тому якісна система керування реалізується за допомогою відносно складних алгоритмів. Переважна більшість АД використовується у нерегульованих електроприводах.
При підключенні обмотки статора двигуна до мережі створюється магнітне поле, яке обертається із синхронною швидкістю
![]() ,
[рад/с] (1)
,
[рад/с] (1)
маючи синхронну частоту обертання
![]() ,
[об/хв] (2)
,
[об/хв] (2)
де f1 – частота напруги живлення статора, Гц;
р – число пар полюсів двигуна.
Для стандартної мережі з частотою напруги f1=50 Гц існує відповідний ряд синхронних швидкостей у залежності від числа пар полюсів двигуна. Тому при проектуванні ЕП та механізму потрібно заздалегідь спиратися на вказаний ряд швидкостей. Із збільшенням числа пар полюсів збільшуються й габарити двигунів.
-
Число пар полюсів
Синхронна частота обертання, об/хв
1
3000
2
1500
3
1000
4
750
5
600
Створене магнітне поле індукує ЕРС взаємоіндукції в обмотці статора Е1 та ротора Е2s
![]()
![]()
де ![]() – ЕРС нерухомого ротора;
– ЕРС нерухомого ротора;
W1, W2 – кількість витків обмоток статора та ротора;
Kw1, Kw2 – коефіцієнти намотування обмоток статора та ротора;
s – ковзання двигуна.
Під дією ЕРС Е2s в обмотці ротора протікає струм ротора І2, який, взаємодіючи з магнітним потоком Ф, створює момент двигуна М. Цей момент обумовлює обертання ротора із швидкістю відносно швидкості магнітного поля c (1) та визначає ковзання двигуна
![]() .
(3)
.
(3)
В залежності від швидкості двигуна ковзання приймає значення відповідно до таблиці
|
Швидкість |
Ковзання |
|
= c |
s = 0 |
|
= 0 |
s = 1 |
|
= – c |
s = 2 |
|
> c |
s < 0 |
|
< 0 |
s > 1 |
|
= н |
s = sн |
Часто ковзання представляється у відсотках
![]() .
.
Двигуни звичайного виконання мають номінальне ковзання в межах sн=1,5-6%. Для металургійних, кранових та інших механізмів випускаються двигуни з підвищеним ковзанням sн=8-12%. Так як ковзання однозначно зв’язане із швидкістю формулою (3), із якої
![]() ,
(4)
,
(4)
то механічна характеристика АД представляється також залежністю ковзання від моменту s=f(M).
ЕРС ротора Е2s залежить від ковзання і при синхронній швидкості двигуна =c дорівнює нулю Е2s=0, що є ознакою роботи двигуна в точці ідеального холостого ходу. Частота ЕРС ротора Е2s та струму ротора І2 також залежить від ковзання
![]()
тобто із зменшенням ковзання частота в роторі зменшується і при наближенні швидкості двигуна до синхронної швидкості c струм та ЕРС ротора наближаються за формою до постійного струму.
Відношення ЕРС статора до ЕРС нерухомого ротора називається коефіцієнтом трансформації і використовується для приведення параметрів ротора до статора
![]()
де U1л н – номінальна лінійна напруга статора;
Е2н – номінальна ЕРС ротора.
На основі Г-подібної схеми заміщення фази двигуна з теорії електричних машин виводиться залежність для моменту двигуна

де U1 – фазна напруга обмотки статора;
І1 – струм обмотки статора;
![]() – приведений струм обмотки ротора;
– приведений струм обмотки ротора;
І – струм намагнічування, який створює магнітний потік Ф;
Х – індуктивний опір взаємоіндукції;
R1, Х1– активний та індуктивний опори обмотки статора;
![]() – приведений активний опір обмотки
ротора;
– приведений активний опір обмотки
ротора;
![]() – приведений індуктивний обмотки
ротора;
– приведений індуктивний обмотки
ротора;
m1, m2 – кількість фаз обмоток статора та ротора.
Для трифазного двигуна з фазним ротором m1=m2=3, а для двигуна з короткозамкненим ротором m2=Z2, W2=0,5, Kw2=1. Згідно рисунка струм ротора визначається залежністю
![]()
де Xk =X1 +X2’ – сумарний індуктивний опір.
Активна електромагнітна потужність трифазного АД, яка передається до ротора через повітряний зазор, з однієї сторони дорівнює

а з іншої
![]()
Після порівняння вказаних потужностей отримується рівняння електромагнітного моменту асинхронного двигуна
 .
(5)
.
(5)
Як видно з (5), момент двигуна залежить від квадрата напруги статора, тому АД дуже чутливий до зниження напруги живлення. Вираз для пускового моменту двигуна отримується з (5) при ковзанні s=1

Функція (5) має точки екстремуму за ковзанням, які знаходяться з рівняння
![]() .
.
Це критичне ковзання
 .
(6)
.
(6)
Критичному ковзанню відповідає критичний момент
 .
(7)
.
(7)
В рівняннях (6) та (7) знак “– “ береться, якщо швидкість двигуна більша за синхронну > c.
З урахуванням формул для критичних ковзання (6) та моменту (7) рівняння моменту (5) перетворюється у формулу Клосса, яка використовується для аналітичної побудови механічних характеристик АД
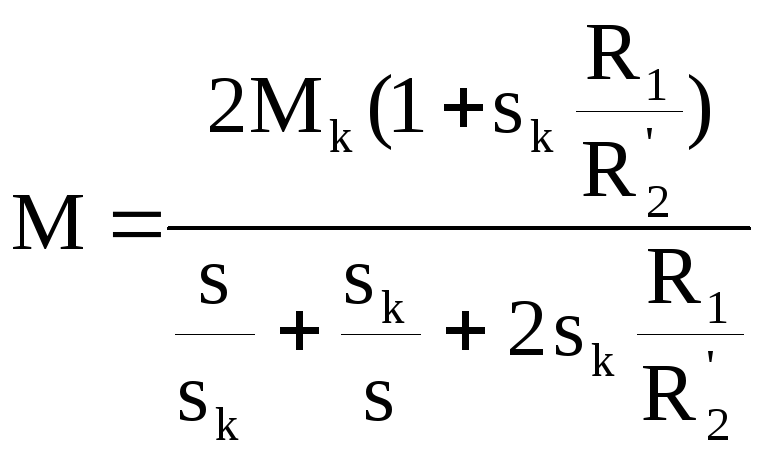 (8)
(8)
Двигуни середньої та великої потужності мають значення опору R1 значно менше, за інші електричні опори двигуна, тому воно часто нехтується R1=0 і формули критичного ковзання, моменту та Клосса значно спрощуються
![]()
![]()

та знаходиться простий вираз для знаходження критичного ковзання двигуна
![]()
де м=Мk/Мн – відношення критичного та номінального моментів.
Механічна характеристика асинхронного двигуна представлена на рисунку

Характерними точками механічної характеристики є:
-
Точка ідеального холостого ходу: М=0, =с, s=0;
-
Номінальна точка: М=Мн, =н, s=sн;
-
Пускова точка (точка короткого замикання): М=Мп, =0, s=1;
-
Точка критичного (максимального) моменту: М=Мk, s=sk.
Робочою ділянкою стійкої роботи
двигуна в усталеному режимі є частина
механічної характеристики між критичними
ковзаннями sk1 та sk2. С![]() инхронна
швидкість поля с
є швидкістю ідеального холостого
ходу двигуна. Критичний момент Мк
– це максимальний момент двигуна,
який визначає його перевантажувальну
здатність м=Мк/Мн=1,73,4.
Більші значення мають двигуни спеціального
виконання, наприклад, для кранових
механізмів. Згідно до (7) критичний момент
у II квадранті більший, ніж у I квадранті
Мк2>Мк1. Величина пускового
моменту Мп залежить від величини
активного електричного опору ротора
R2’,
тому випускаються двигуни з різною
конструкцією короткозамкнених роторів,
наприклад, із круглими та глибокими
пазами, подвійною кліткою тощо, які
забезпечують кратність пускового
моменту п=Мп/Мн=11,8.
В порівнянні з двигунами постійного
струму асинхронні двигуни мають невеликий
пусковий момент, що є недоліком. Природна
механічна характеристика двигуна
відповідає його увімкненню на номінальні
напругу U1 і частоту f1 статора
при відсутності додаткових електричних
опорів у колі ротора чи статора.
инхронна
швидкість поля с
є швидкістю ідеального холостого
ходу двигуна. Критичний момент Мк
– це максимальний момент двигуна,
який визначає його перевантажувальну
здатність м=Мк/Мн=1,73,4.
Більші значення мають двигуни спеціального
виконання, наприклад, для кранових
механізмів. Згідно до (7) критичний момент
у II квадранті більший, ніж у I квадранті
Мк2>Мк1. Величина пускового
моменту Мп залежить від величини
активного електричного опору ротора
R2’,
тому випускаються двигуни з різною
конструкцією короткозамкнених роторів,
наприклад, із круглими та глибокими
пазами, подвійною кліткою тощо, які
забезпечують кратність пускового
моменту п=Мп/Мн=11,8.
В порівнянні з двигунами постійного
струму асинхронні двигуни мають невеликий
пусковий момент, що є недоліком. Природна
механічна характеристика двигуна
відповідає його увімкненню на номінальні
напругу U1 і частоту f1 статора
при відсутності додаткових електричних
опорів у колі ротора чи статора.
Для зміни моменту двигуна згідно формули (5) і відповідно для керування швидкості існують наступні способи:
-
Зміна напруги статора U1;
-
Зміна частоти напруги статора f1, в тому числі одночасно зі зміною напруги статора U1;
-
Зміна активного електричного опору кола ротора R’2 (тільки для двигунів із фазним ротором);
-
Зміна числа пар полюсів p (тільки для спеціальних двигунів, що дозволяють перемикання полюсів );
-
Використання енергії ковзання за допомогою спеціальних каскадних схем (тільки для двигунів із фазним ротором);
-
Подвійне живлення двигуна (тільки для двигунів із фазним ротором);
-
Зміна електричного опору кола статора R1 (тільки для двигунів із короткозамкненим ротором).
1) Керування швидкості за рахунок зміни напруги статора.
Для реалізації способу керування двигун живиться від силового регулятора напруги (РН), який виготовляється на основі транзисторів чи тиристорів

Напруга статора врівноважується ЕРС статора та падінням напруги в колі статора
![]()
Якщо знехтувати незначним значенням падіння напруги в статорі, то згідно до наведеної формули приблизно можна прийняти
![]()
З формули для ЕРС статора Е1 знаходиться магнітний потік двигуна
![]() .
(9)
.
(9)
Як видно з (9), для запобігання насичення магнітної системи двигуна напругу статора можна тільки зменшувати відносно номінальної U1н, бо номінальний магнітний потік Фн лежить близько до потоку насичення Фнас

Струм намагнічування I відповідно до раніше наведеної Г-подібної схеми заміщення пропорційно залежить від напруги статора U1. Зниження напруги статора не впливає на швидкість ідеального холостого ходу с та на критичне ковзання sk , а тільки зменшує пропорційно квадрата напруги критичний момент Мк , тому всі штучні характеристики проходять через одну точку с та мають однакове критичне ковзання sk .

Перевагою даного способу керування є можливість плавної зміни швидкості. Недоліком є суттєве зменшення перевантажувальної здатності двигуна пропорційно квадрата напруги та зниження жорсткості механічної характеристики, тобто збільшення ковзання двигуна. Це призводить до підвищення втрат у колі ротора пропорційно ковзанню
![]()
тому цей спосіб використовується при невеликому діапазоні керування швидкості в межах 2-4, а також для короткочасного зниження швидкості та для запуску механізмів. Спосіб якнайкраще підходить для струминних механізмів (вентиляторів, насосів тощо), момент опору яких залежить від квадрата швидкості. Розширення діапазону керування до 5-10 та підвищення жорсткості характеристик здійснюється за рахунок замкненої системи керування зі зворотним зв’язком за швидкістю.
2) Керування швидкості за рахунок зміни частоти та амплітуди напруги живлення.
В цьому випадку обмотка статора двигуна живиться від силового перетворювача частоти, який реалізується на транзисторах чи тиристорах. Якщо керування швидкістю здійснюється тільки зміною частоти f1, то її згідно до (9) можна тільки збільшувати відносно номінальної f1н для запобігання насичення магнітного кола двигуна.

Збільшення частоти призводить до пропорційного збільшення синхронної швидкості с та до зменшення пропорційно квадрата частоти критичного моменту Мк , так як і синхронна швидкість і індуктивний опір обмоток статора та ротора залежать від частоти
![]()
Жорсткість механічних характеристик на робочій ділянці не змінюється, бо пропорційному збільшенню синхронної швидкості відповідає пропорційне зменшення критичного ковзання. Сімейство штучних механічних характеристик представлено на рисунку

Робочі точки визначаються перетином механічних характеристик двигуна та механізму, який створює статичний момент Мс. Перевагою способу є плавна зміна швидкості при незмінній жорсткості характеристик. Недолік полягає в зменшенні перевантажувальної здатності двигуна та можливості керування швидкістю тільки вище номінальної.
Якщо знехтувати активним електричним опором статора R1, то критичний момент двигуна стає залежним у квадраті від напруги та частоти статора

де К – коефіцієнт пропорційності.
Звідсіля випливає основний закон частотного керування швидкості асинхронного двигуна, який ще називається законом Костенка
![]() (10)
(10)
Згідно до нього частота повинна змінюється пропорційно зміні напруги. Це забезпечує незмінне значення критичного моменту та незмінний номінальний магнітний потік (9) при широкому діапазоні керування швидкістю від нулю і до максимальної. Найчастіше в якості максимальної виступає номінальна швидкість, якій відповідає номінальна напруга статора. Підвищення напруги вище номінальної обмежується електричною стійкістю ізоляції обмотки. Сімейство штучних механічних характеристик, які мають паралельні робочі ділянки, представлено на рисунку

При низьких швидкостях падіння напруги в колі статора, яке нехтується при виводі закону керування, стає співвимірним із напругою живлення статора, що призводить до зменшення критичного моменту (крива лінія з точок на рисунку). Для виправлення недоліку на низьких швидкостях напругу потрібно зменшувати в меншій мірі, чим за законом (10) або за допомогою замкненої системи керування підтримувати незмінним співвідношення ЕРС статора до частоти, щоб згідно (9) не змінювався магнітний потік. Крім того, при пуску двигуна, тобто при частоті близької до нульової, потрібне початкове значення напруги U1o для створення магнітного потоку і відповідно моменту двигуна. Для цього пуск починається з початкової частоти f1o=(3–5) Гц та відповідного значення напруги. Значення U1o може встановлюватися вручну чи автоматично, в тому числі з урахуванням величини динамічного моменту для створення заданого прискорення електропривода. Для реалізації способу керування (10) найчастіше використовуються перетворювачі частоти з ланкою постійного струму, які складаються з керованого випрямляча (КВ), фільтра (Ф), автономного інвертора (АІ) та систем керування випрямлячем (СКВ), інвертором (СКІ) і електроприводом у цілому (СК).

Величина напруги статора U1 змінюється КВ, а частоти f1 – АІ. Для невеликих потужностей замість керованого випрямляча використовується некерований, а за допомогою АІ із системою широтно-імпульсної модуляції (ШІМ) одночасно регулюється і напруга й частота. АІ може бути джерелом напруги чи струму і в залежності від цього існують різні види замкнених систем керування швидкістю асинхронного двигуна. Розглянутий спосіб частотного керування швидкості асинхронного двигуна є основним. Його перевагою є плавна зміна швидкості від нуля і до максимальної (номінальної) при незмінній жорсткості механічних характеристик та перевантажувальній здатності двигуна. Діапазон керування складає 5-10 для розімкнутих систем та 1000 і більше для замкнених. Він називається “керування в першій зоні з постійним моментом двигуна”. Недолік полягає у відносній складності та підвищеній вартості перетворювача частоти.
Для струминних механізмів
(вентилятори, насоси тощо), статичний
момент яких пропорційний квадрату
швидкості
![]() , найбільш економічним є закон керування
, найбільш економічним є закон керування
![]()
при якому критичний момент двигуна
зменшується пропорційно
квадрата швидкості
![]() ,
відтворюючи характер статичного моменту
та зменшуючи магнітний потік і споживання
реактивної енергії.
,
відтворюючи характер статичного моменту
та зменшуючи магнітний потік і споживання
реактивної енергії.

Для керування швидкістю із забезпеченням повної потужності двигуна, але з послабленням магнітного потоку і відповідно зменшенням критичного моменту двигуна застосовується закон керування
![]()
При цьому момент двигуна змінюється обернено пропорційно, а синхронна швидкість пропорційно частоті, тому потужність, як їх добуток залишається незмінною. Напруга вище номінальної не піднімається і при подальшому збільшенні частоти вона залишається незмінною. Сімейство штучних механічних характеристик показано на рисунку.

Розглянуті частотні закони керування швидкості асинхронного двигуна є найбільш поширеними. Розвиток елементної бази силової промелектроніки та впровадження мікропроцесорних систем керування електроприводом суттєво зменшили вартість та габарити перетворювачів частоти, а також забезпечили високу якість керування, що обумовлює заміну нерегульованих асинхронних ЕП на регульовані та витіснення з окремих галузей ЕП постійного струму.
3) Керування швидкості за рахунок увімкнення додаткового електричного резистора в коло ротора.
Для керування швидкості використовуються двигуни з фазним ротором, в коло ротора яких підключається трифазний реостат. Електричний опір реостата Rд за умовами комутації змінюється ступенями шляхом замикання секцій силовими контактами.

Сумарний приведений активний електричний опір кола ротора дорівнює
![]()
Синхронна швидкість с та критичний момент Мк не залежать від R’2, тому всі штучні механічні характеристики проходять через одну точку ідеального холостого ходу. Критичне ковзання sk збільшується із збільшенням R’2, що призводить до зменшення жорсткості штучних характеристик.

На основі відношення критичних ковзань на штучній та природній характеристиках знаходиться критичне ковзання на штучній характеристиці
![]()
чи величина додаткового опору, яка забезпечує потрібне критичне ковзання
![]()
Остання формула справедлива також для відношення ковзань при будь-якому статичному моменту.
Перевагою даного способу керування є простота його реалізації та підвищення пускового моменту двигуна, який приймає максимальне значення при критичному ковзанні sк =1. Недоліки полягають у керуванні швидкістю ступенями, зменшенні жорсткості механічних характеристик, що призводить до різкого збільшення втрат у колі ротора пропорційно ковзанню та до чутливості зміни навантаження. Це обмежує діапазон керування на рівні 1,5-2 для незмінного статичного моменту та 3-5 для моменту вентиляторного типу.
Увімкнення додаткового резистора в коло ротора застосовується також при керуванні швидкості двигуна за рахунок зміни напруги статора для збільшення пускового моменту. Використовуються також схеми з імпульсним регулюванням еквівалентного опору в колі ротора за допомогою широтно-імпульсної модуляції електронних ключів ЕК на тиристорах чи транзисторах.

а) б)
Керування здійснюється зміною шпаруватості імпульсів у межах =0–1. Це дозволяє плавно змінювати швидкість від min до max , проте додатковим недоліком є погіршення енергетичних показників ЕП через несинусоїдальність струмів двигуна.
