

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
“Київський політехнічний інститут”
МЕТОДИЧНІ ВКАЗІВКИ
ДО ВИКОНАННЯ ДОМАШНІХ РОБІТ ІЗ ДИСЦИПЛІНИ
“ТЕОРІЯ ЕЛЕКТРОПРИВОДА”
для студентів спеціальності 7.092203
Електромеханічні системи автоматизації та електропривод
Затверджено
на засіданні кафедри
електропривода та автоматизації
промислових установок
Протокол № 6 від 30.01.2003 р.
Київ НТУУ “КПІ” 2003
Методичні вказівки до виконання домашніх робіт із дисципліни “Теорія електропривода” для студентів спеціальності 7.092203 Електромеханічні системи автоматизації та електропривод/Укл. М.Я.Островерхов.– К.:НТУУ ”КПІ”, 2003.– 83 с.
Укладач Островерхов Микола Якович, канд. техн. наук
Відповідальний редактор О.В.Ковальчук
Рецензент М.В.Печеник
Темплан 2003 р., поз. 17
Видавничий центр ФЕА НТУУ “КПІ”, 03056, Київ-56, пр. Перемоги, 37
Розмножено на ризографі. Друк. арк.-1,3. Тираж-250. Зам.-11. 2003 р.
ВСТУП
Домашні роботи з дисципліни “Теорія електропривода” призначені для закріплення теоретичних знань й надбання практичних навичок студентами 3-го курсу при вирішенні задач із механіки електропривода, електромеханічних властивостей двигунів постійного й змінного струму та електромеханічних перехідних процесів.
Номер індивідуального завдання відповідає номеру студента у списку викладача відповідної учбової групи.
Домашні роботи оформлюється на аркушах паперу формату А4, які ліворуч жорстко скріплюються. Матеріали роботи розміщуються з однієї сторони аркушів паперу. Звіт про домашню роботу складається з титульного листа, послідовно розташованих номеру й змісту завдання та розрахунків із поясненням результатів. В кінці звіту наводиться висновок за результатами роботи. Кожен розділ звіту починається з нового аркуша з відповідним заголовком. Приклад оформлення титульного листа наведено у додатку.
Завдання домашньої роботи №1 направлені на визначення параметрів розрахункових схем механічної частини, розрахунок механічних характеристик двигуна постійного струму з незалежним збудженням у різних режимах роботи, проведення досліджень роботи електропривода шляхом моделювання.
Домашня робота №2 присвячена розрахунку параметрів асинхронного двигуна, побудові його механічних характеристик у різних режимах роботи, дослідженню електромеханічних перехідних процесів узагальненої електромеханічної системи.
ДОМАШНЯ РОБОТА № 1
-
Дати визначення електропривода, привести його функціональну схему та описати її складові.
-
Привести до швидкості двигуна параметри механічної частини підйомного механізму, рис. 1. Вихідні дані знаходяться у табл. 1. Жорсткість одного метра канату позначена cк, коефіцієнти корисної дії редуктора й лебідки – р й б, коефіцієнт передачі редуктора – iр. Маса каната не враховується.
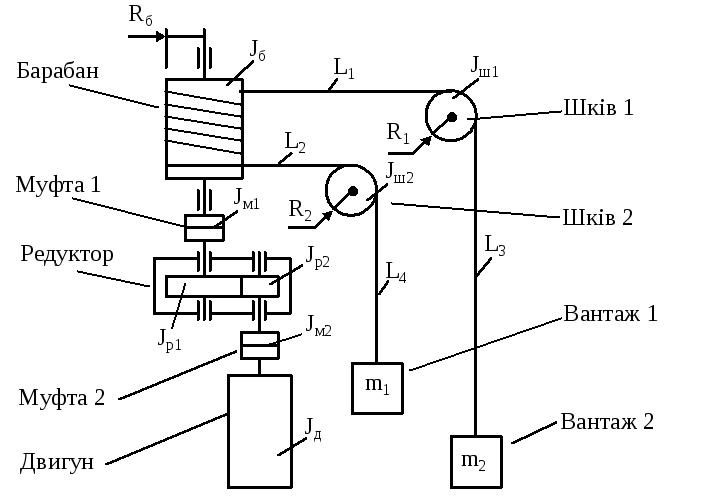
Рис. 1. Кінематична схема підйомного механізму
-
Скласти попередню розрахункову схему механічної частини.
-
Проаналізувати параметри попередньої розрахункової схеми й отримати дво- та одномасову розрахункову схему.
-
За допомогою рівняння Лагранжа ІІ-го роду отримати диференційні рівняння, що описують рух механічної системи у вигляді двомасової розрахункової схеми. На основі отриманих рівнянь побудувати структурну схему механічної частини.
-
За допомогою рівняння Лагранжа ІІ-го роду отримати диференційні рівняння, що описують рух механічної системи у вигляді одномасової розрахункової схеми. На основі отриманих рівнянь побудувати структурну схему механічної частини.
Таблиця 1. Вихідні дані елементів механічної частини
|
Варіант |
Jд, кг*м2 |
Jм1, кг*м2 |
Jм2, кг*м2 |
Jр1, кг*м2 |
Jр2, кг*м2 |
Jб, кг*м2 |
Jш1, кг*м2 |
Jш2, кг*м2 |
|
1 |
0,038 |
0,380 |
0,0019 |
1,52 |
0,0032 |
3,04 |
0,21 |
0,21 |
|
2 |
0,084 |
1,016 |
0,0042 |
4,07 |
0,0070 |
8,13 |
0,56 |
0,56 |
|
3 |
0,014 |
0,202 |
0,0007 |
0,81 |
0,0012 |
1,61 |
0,11 |
0,11 |
|
4 |
0,014 |
0,237 |
0,0007 |
0,95 |
0,0012 |
1,89 |
0,13 |
0,13 |
|
5 |
0,038 |
0,745 |
0,0019 |
2,98 |
0,0032 |
5,96 |
0,41 |
0,41 |
|
6 |
0,084 |
1,890 |
0,0042 |
7,56 |
0,0070 |
15,12 |
1,05 |
1,05 |
|
7 |
0,014 |
0,358 |
0,0007 |
1,43 |
0,0012 |
2,87 |
0,20 |
0,20 |
|
8 |
0,038 |
1,098 |
0,0019 |
4,39 |
0,0032 |
8,79 |
0,61 |
0,61 |
|
9 |
0,084 |
2,722 |
0,0042 |
10,89 |
0,0070 |
21,77 |
1,51 |
1,51 |
|
10 |
0,084 |
3,032 |
0,0042 |
12,13 |
0,0070 |
24,26 |
1,68 |
1,68 |
|
11 |
0,014 |
0,560 |
0,0007 |
2,24 |
0,0012 |
4,48 |
0,31 |
0,31 |
|
12 |
0,038 |
1,676 |
0,0019 |
6,70 |
0,0032 |
13,41 |
0,93 |
0,93 |
|
13 |
0,014 |
0,678 |
0,0007 |
2,71 |
0,0012 |
5,42 |
0,38 |
0,38 |
|
14 |
0,038 |
2,010 |
0,0019 |
8,04 |
0,0032 |
16,08 |
1,12 |
1,12 |
|
15 |
0,084 |
4,838 |
0,0042 |
19,35 |
0,0070 |
38,71 |
2,69 |
2,69 |
|
16 |
0,014 |
0,090 |
0,0007 |
0,36 |
0,0012 |
0,72 |
0,05 |
0,05 |
|
17 |
0,038 |
0,308 |
0,0019 |
1,23 |
0,0032 |
2,46 |
0,17 |
0,17 |
|
18 |
0,084 |
0,840 |
0,0042 |
3,36 |
0,0070 |
6,72 |
0,47 |
0,47 |
|
19 |
0,084 |
1,016 |
0,0042 |
4,07 |
0,0070 |
8,13 |
0,56 |
0,56 |
|
20 |
0,038 |
0,547 |
0,0019 |
2,19 |
0,0032 |
4,38 |
0,30 |
0,30 |
|
21 |
0,014 |
0,237 |
0,0007 |
0,95 |
0,0012 |
1,89 |
0,13 |
0,13 |
|
22 |
0,038 |
0,745 |
0,0019 |
2,98 |
0,0032 |
5,96 |
0,41 |
0,41 |
|
23 |
0,084 |
1,890 |
0,0042 |
7,56 |
0,0070 |
15,12 |
1,05 |
1,05 |
|
24 |
0,014 |
0,358 |
0,0007 |
1,43 |
0,0012 |
2,87 |
0,20 |
0,20 |
|
25 |
0,038 |
1,098 |
0,0019 |
4,39 |
0,0032 |
8,79 |
0,61 |
0,61 |
|
26 |
0,014 |
0,454 |
0,0007 |
1,81 |
0,0012 |
3,63 |
0,25 |
0,25 |
|
27 |
0,084 |
3,032 |
0,0042 |
12,13 |
0,0070 |
24,26 |
1,68 |
1,68 |
|
28 |
0,014 |
0,560 |
0,0007 |
2,24 |
0,0012 |
4,48 |
0,31 |
0,31 |
|
29 |
0,038 |
1,676 |
0,0019 |
6,70 |
0,0032 |
13,41 |
0,93 |
0,93 |
|
30 |
0,084 |
4,066 |
0,0042 |
16,26 |
0,0070 |
32,52 |
2,26 |
2,26 |
Продовження таблиці 1
|
Варіант |
m1, кг |
m2, кг |
R1, м |
R2, м |
Rб, м |
iр |
р |
б |
|
1 |
960 |
820 |
0,10 |
0,10 |
0,12 |
10 |
0,94 |
0,97 |
|
2 |
1330 |
1110 |
0,12 |
0,12 |
0,16 |
11 |
0,95 |
0,96 |
|
3 |
970 |
880 |
0,07 |
0,07 |
0,08 |
12 |
0,96 |
0,95 |
|
4 |
870 |
780 |
0,07 |
0,07 |
0,09 |
13 |
0,97 |
0,94 |
|
5 |
1170 |
980 |
0,12 |
0,12 |
0,14 |
14 |
0,98 |
0,93 |
|
6 |
1530 |
1240 |
0,15 |
0,15 |
0,18 |
15 |
0,94 |
0,97 |
|
7 |
620 |
510 |
0,09 |
0,09 |
0,12 |
16 |
0,95 |
0,96 |
|
8 |
870 |
670 |
0,14 |
0,14 |
0,17 |
17 |
0,96 |
0,95 |
|
9 |
1140 |
830 |
0,18 |
0,18 |
0,22 |
18 |
0,97 |
0,94 |
|
10 |
770 |
450 |
0,22 |
0,22 |
0,28 |
19 |
0,98 |
0,93 |
|
11 |
510 |
390 |
0,12 |
0,12 |
0,14 |
20 |
0,94 |
0,97 |
|
12 |
710 |
470 |
0,17 |
0,17 |
0,22 |
21 |
0,95 |
0,96 |
|
13 |
380 |
260 |
0,13 |
0,13 |
0,17 |
22 |
0,96 |
0,95 |
|
14 |
550 |
310 |
0,20 |
0,20 |
0,26 |
23 |
0,97 |
0,94 |
|
15 |
640 |
300 |
0,25 |
0,25 |
0,32 |
24 |
0,98 |
0,93 |
|
16 |
500 |
440 |
0,07 |
0,07 |
0,08 |
8 |
0,94 |
0,97 |
|
17 |
780 |
660 |
0,10 |
0,10 |
0,12 |
9 |
0,95 |
0,96 |
|
18 |
1110 |
910 |
0,12 |
0,12 |
0,16 |
10 |
0,96 |
0,95 |
|
19 |
940 |
710 |
0,15 |
0,15 |
0,18 |
11 |
0,97 |
0,94 |
|
20 |
870 |
710 |
0,12 |
0,12 |
0,14 |
12 |
0,98 |
0,93 |
|
21 |
710 |
620 |
0,07 |
0,07 |
0,09 |
13 |
0,94 |
0,97 |
|
22 |
610 |
440 |
0,14 |
0,14 |
0,17 |
14 |
0,95 |
0,96 |
|
23 |
810 |
550 |
0,18 |
0,18 |
0,22 |
15 |
0,96 |
0,95 |
|
24 |
540 |
440 |
0,09 |
0,09 |
0,12 |
16 |
0,97 |
0,94 |
|
25 |
480 |
290 |
0,17 |
0,17 |
0,22 |
17 |
0,98 |
0,93 |
|
26 |
370 |
270 |
0,12 |
0,12 |
0,14 |
18 |
0,94 |
0,97 |
|
27 |
640 |
350 |
0,22 |
0,22 |
0,28 |
19 |
0,95 |
0,96 |
|
28 |
320 |
210 |
0,13 |
0,13 |
0,17 |
20 |
0,96 |
0,95 |
|
29 |
470 |
250 |
0,20 |
0,20 |
0,26 |
21 |
0,97 |
0,94 |
|
30 |
550 |
240 |
0,25 |
0,25 |
0,32 |
22 |
0,98 |
0,93 |
Продовження таблиці 1
|
Варіант |
L1, м |
L2, м |
L3, м |
L4, м |
cк, Н |
Напрямок руху вантажу 1 |
|
1 |
3 |
12 |
200 |
6 |
2,00E+06 |
Униз |
|
2 |
4 |
13 |
17 |
250 |
3,75E+06 |
Угору |
|
3 |
5 |
14 |
210 |
8 |
7,50E+05 |
Униз |
|
4 |
6 |
15 |
16 |
260 |
1,06E+06 |
Угору |
|
5 |
7 |
16 |
220 |
10 |
3,13E+06 |
Униз |
|
6 |
8 |
17 |
15 |
270 |
5,63E+06 |
Угору |
|
7 |
9 |
3 |
230 |
12 |
1,88E+06 |
Униз |
|
8 |
10 |
4 |
14 |
280 |
5,00E+06 |
Угору |
|
9 |
11 |
5 |
240 |
14 |
9,38E+06 |
Униз |
|
10 |
12 |
6 |
13 |
200 |
1,63E+07 |
Угору |
|
11 |
13 |
7 |
250 |
5 |
3,13E+06 |
Униз |
|
12 |
14 |
8 |
12 |
210 |
8,75E+06 |
Угору |
|
13 |
15 |
9 |
260 |
7 |
4,50E+06 |
Униз |
|
14 |
16 |
10 |
11 |
220 |
1,31E+07 |
Угору |
|
15 |
17 |
11 |
270 |
9 |
2,25E+07 |
Униз |
|
16 |
3 |
10 |
9 |
230 |
7,50E+05 |
Угору |
|
17 |
4 |
11 |
280 |
11 |
2,00E+06 |
Униз |
|
18 |
5 |
12 |
8 |
240 |
3,75E+06 |
Угору |
|
19 |
6 |
13 |
290 |
13 |
5,63E+06 |
Униз |
|
20 |
7 |
14 |
7 |
250 |
3,13E+06 |
Угору |
|
21 |
8 |
15 |
300 |
4 |
1,06E+06 |
Униз |
|
22 |
9 |
16 |
6 |
260 |
5,00E+06 |
Угору |
|
23 |
10 |
17 |
250 |
5 |
9,38E+06 |
Униз |
|
24 |
11 |
4 |
5 |
270 |
1,88E+06 |
Угору |
|
25 |
12 |
5 |
260 |
6 |
8,75E+06 |
Униз |
|
26 |
13 |
6 |
9 |
280 |
3,13E+06 |
Угору |
|
27 |
14 |
7 |
270 |
7 |
1,63E+07 |
Униз |
|
28 |
15 |
8 |
10 |
290 |
4,50E+06 |
Угору |
|
29 |
16 |
9 |
280 |
8 |
1,31E+07 |
Униз |
|
30 |
17 |
10 |
11 |
300 |
2,25E+07 |
Угору |
-
Дати визначення природної механічної характеристики двигуна постійного струму з незалежним збудженням.
-
Розрахувати відповідно до даних табл. 2, побудувати для обох напрямків руху й позначити характерні точки природної механічної характеристики двигуна постійного струму з незалежним збудженням.
Таблиця 2. Номінальні дані двигунів постійного струму серії 2ПН
|
Варіант |
Потужність Рн, кВт |
Напруга якоря Uн, В |
Струм якоря Iн, А |
Частота обертання nн, об/хв |
Напруга збудження Uзн, В |
Струм збудження Iзн, А |
Число полюсів 2p |
Момент інерції J, кг*м2 |
|
1 |
1,60 |
220 |
9,40 |
750 |
220 |
1,25 |
4 |
0,038 |
|
2 |
3,00 |
220 |
16,60 |
750 |
220 |
1,27 |
4 |
0,084 |
|
3 |
0,60 |
220 |
3,90 |
800 |
220 |
0,71 |
4 |
0,014 |
|
4 |
0,85 |
220 |
5,30 |
950 |
220 |
0,71 |
4 |
0,014 |
|
5 |
2,50 |
220 |
14,20 |
1000 |
220 |
1,25 |
4 |
0,038 |
|
6 |
4,50 |
220 |
24,20 |
1000 |
220 |
1,55 |
4 |
0,084 |
|
7 |
1,50 |
220 |
8,80 |
1500 |
220 |
0,92 |
4 |
0,014 |
|
8 |
4,00 |
220 |
21,80 |
1500 |
220 |
1,32 |
4 |
0,038 |
|
9 |
7,50 |
220 |
39,20 |
1500 |
220 |
2,04 |
4 |
0,084 |
|
10 |
13,00 |
220 |
66,50 |
2120 |
220 |
2,71 |
4 |
0,084 |
|
11 |
2,50 |
220 |
13,80 |
2200 |
220 |
1,07 |
4 |
0,014 |
|
12 |
7,00 |
220 |
36,70 |
2240 |
220 |
1,60 |
4 |
0,038 |
|
13 |
3,60 |
220 |
19,30 |
3000 |
220 |
1,29 |
4 |
0,014 |
|
14 |
10,50 |
220 |
54,70 |
3000 |
220 |
1,67 |
4 |
0,038 |
|
15 |
18,00 |
220 |
92,00 |
3150 |
220 |
3,14 |
4 |
0,084 |
|
16 |
0,60 |
440 |
2,00 |
750 |
220 |
0,71 |
4 |
0,014 |
|
17 |
1,60 |
440 |
4,70 |
750 |
220 |
1,25 |
4 |
0,038 |
|
18 |
3,00 |
440 |
8,30 |
750 |
220 |
1,27 |
4 |
0,084 |
|
19 |
4,50 |
440 |
12,10 |
950 |
220 |
1,55 |
4 |
0,084 |
|
20 |
2,50 |
440 |
7,20 |
1000 |
220 |
1,25 |
4 |
0,038 |
|
21 |
0,85 |
440 |
2,70 |
1060 |
220 |
0,71 |
4 |
0,014 |
|
22 |
4,00 |
440 |
10,90 |
1500 |
220 |
1,32 |
4 |
0,038 |
|
23 |
7,50 |
440 |
19,40 |
1500 |
220 |
2,04 |
4 |
0,084 |
|
24 |
1,50 |
440 |
4,30 |
1600 |
220 |
0,92 |
4 |
0,014 |
|
25 |
7,00 |
440 |
18,40 |
2240 |
220 |
1,60 |
4 |
0,038 |
|
26 |
2,50 |
440 |
6,90 |
2360 |
220 |
1,07 |
4 |
0,014 |
|
27 |
13,00 |
440 |
33,00 |
2360 |
220 |
2,71 |
4 |
0,084 |
|
28 |
3,60 |
440 |
9,70 |
3000 |
220 |
1,29 |
4 |
0,014 |
|
29 |
10,50 |
440 |
27,10 |
3000 |
220 |
1,67 |
4 |
0,038 |
|
30 |
18,00 |
440 |
45,50 |
3150 |
220 |
3,14 |
4 |
0,084 |
-
Дати визначення робочої точки механічної характеристики, нанести робочі точки для обох напрямків руху на природну механічну характеристику для статичного моменту відповідно до даних табл. 3 й обчислити швидкості двигуна.
Таблиця 3. Значення та вид статичного моменту
|
Варіант |
Значення |
Вид |
Варіант |
Значення |
Вид |
|
1 |
1,0*Мн |
Реактивний |
16 |
1,05*Мн |
Активний |
|
2 |
0,9*Мн |
Активний |
17 |
0,95*Мн |
Реактивний |
|
3 |
0,8*Мн |
Реактивний |
18 |
0,85*Мн |
Активний |
|
4 |
0,7*Мн |
Активний |
19 |
0,75*Мн |
Реактивний |
|
5 |
0,6*Мн |
Реактивний |
20 |
0,65*Мн |
Активний |
|
6 |
0,5*Мн |
Активний |
21 |
0,55*Мн |
Реактивний |
|
7 |
0,4*Мн |
Реактивний |
22 |
0,45*Мн |
Активний |
|
8 |
1,0*Мн |
Активний |
23 |
1,05*Мн |
Реактивний |
|
9 |
0,9*Мн |
Реактивний |
24 |
0,95*Мн |
Активний |
|
10 |
0,8*Мн |
Активний |
25 |
0,85*Мн |
Реактивний |
|
11 |
0,7*Мн |
Реактивний |
26 |
0,75*Мн |
Активний |
|
12 |
0,6*Мн |
Активний |
27 |
0,65*Мн |
Реактивний |
|
13 |
0,5*Мн |
Реактивний |
28 |
0,55*Мн |
Активний |
|
14 |
0,4*Мн |
Активний |
29 |
0,45*Мн |
Реактивний |
|
15 |
0,3*Мн |
Реактивний |
30 |
0,35*Мн |
Активний |
-
Дати визначення штучним механічним характеристикам двигуна постійного струму з незалежним збудженням.
-
Описати та пояснити за допомогою механічних характеристик й функціональних схем способи керування швидкістю двигуна постійного струму з незалежним збудженням. Привести переваги та недоліки кожного способу.
Таблиця 4. Значення напруги якоря
|
Варіант |
Напруга якоря |
Варіант |
Напруга якоря |
||||
|
1 |
0,91*Uн |
0,61*Uн |
0,41*Uн |
16 |
0,86*Uн |
0,56*Uн |
0,36*Uн |
|
2 |
0,92*Uн |
0,62*Uн |
0,42*Uн |
17 |
0,87*Uн |
0,57*Uн |
0,37*Uн |
|
3 |
0,93*Uн |
0,63*Uн |
0,43*Uн |
18 |
0,88*Uн |
0,58*Uн |
0,38*Uн |
|
4 |
0,94*Uн |
0,64*Uн |
0,44*Uн |
19 |
0,89*Uн |
0,59*Uн |
0,39*Uн |
|
5 |
0,95*Uн |
0,65*Uн |
0,45*Uн |
20 |
0,90*Uн |
0,60*Uн |
0,40*Uн |
|
6 |
0,96*Uн |
0,66*Uн |
0,46*Uн |
21 |
0,91*Uн |
0,61*Uн |
0,41*Uн |
|
7 |
0,97*Uн |
0,67*Uн |
0,47*Uн |
22 |
0,92*Uн |
0,62*Uн |
0,42*Uн |
|
8 |
0,88*Uн |
0,68*Uн |
0,48*Uн |
23 |
0,93*Uн |
0,63*Uн |
0,43*Uн |
|
9 |
0,89*Uн |
0,69*Uн |
0,49*Uн |
24 |
0,94*Uн |
0,64*Uн |
0,44*Uн |
|
10 |
0,90*Uн |
0,70*Uн |
0,50*Uн |
25 |
0,95*Uн |
0,65*Uн |
0,45*Uн |
|
11 |
0,81*Uн |
0,71*Uн |
0,51*Uн |
26 |
0,86*Uн |
0,66*Uн |
0,46*Uн |
|
12 |
0,82*Uн |
0,72*Uн |
0,52*Uн |
27 |
0,87*Uн |
0,67*Uн |
0,47*Uн |
|
13 |
0,83*Uн |
0,73*Uн |
0,53*Uн |
28 |
0,88*Uн |
0,68*Uн |
0,48*Uн |
|
14 |
0,84*Uн |
0,74*Uн |
0,54*Uн |
29 |
0,89*Uн |
0,69*Uн |
0,49*Uн |
|
15 |
0,85*Uн |
0,75*Uн |
0,55*Uн |
30 |
0,90*Uн |
0,70*Uн |
0,50*Uн |
-
Побудувати в І-му квадранті природну та штучні механічні характеристики при зміні напруги якоря відповідно до даних табл. 4. Нанести робочі точки відповідно до даних табл. 3 та обчислити швидкості двигуна.
-
Побудувати в І-му квадранті природну та штучні механічні й електромеханічні характеристики при зміні магнітного потоку відповідно до даних табл. 5. Нанести робочі точки та обчислити швидкості двигуна, визначити струм короткого замикання.
Таблиця 5. Значення магнітного потоку
|
Варіант |
Магнітний потік |
Варіант |
Магнітний потік |
||||
|
1 |
0,91*Фн |
0,61*Фн |
0,51*Фн |
16 |
0,86*Фн |
0,66*Фн |
0,56*Фн |
|
2 |
0,92*Фн |
0,62*Фн |
0,52*Фн |
17 |
0,87*Фн |
0,67*Фн |
0,57*Фн |
|
3 |
0,93*Фн |
0,63*Фн |
0,53*Фн |
18 |
0,88*Фн |
0,68*Фн |
0,58*Фн |
|
4 |
0,94*Фн |
0,64*Фн |
0,54*Фн |
19 |
0,89*Фн |
0,69*Фн |
0,59*Фн |
|
5 |
0,95*Фн |
0,65*Фн |
0,55*Фн |
20 |
0,90*Фн |
0,70*Фн |
0,50*Фн |
|
6 |
0,96*Фн |
0,66*Фн |
0,56*Фн |
21 |
0,91*Фн |
0,71*Фн |
0,51*Фн |
|
7 |
0,97*Фн |
0,67*Фн |
0,57*Фн |
22 |
0,92*Фн |
0,72*Фн |
0,52*Фн |
|
8 |
0,88*Фн |
0,68*Фн |
0,58*Фн |
23 |
0,93*Фн |
0,73*Фн |
0,53*Фн |
|
9 |
0,89*Фн |
0,69*Фн |
0,59*Фн |
24 |
0,94*Фн |
0,74*Фн |
0,54*Фн |
|
10 |
0,90*Фн |
0,70*Фн |
0,60*Фн |
25 |
0,95*Фн |
0,75*Фн |
0,55*Фн |
|
11 |
0,81*Фн |
0,71*Фн |
0,61*Фн |
26 |
0,86*Фн |
0,76*Фн |
0,56*Фн |
|
12 |
0,82*Фн |
0,72*Фн |
0,62*Фн |
27 |
0,87*Фн |
0,77*Фн |
0,57*Фн |
|
13 |
0,83*Фн |
0,73*Фн |
0,63*Фн |
28 |
0,88*Фн |
0,78*Фн |
0,58*Фн |
|
14 |
0,84*Фн |
0,74*Фн |
0,64*Фн |
29 |
0,89*Фн |
0,79*Фн |
0,59*Фн |
|
15 |
0,85*Фн |
0,75*Фн |
0,65*Фн |
30 |
0,90*Фн |
0,80*Фн |
0,60*Фн |
-
Побудувати в І-му квадранті природну та штучні механічні й електромеханічні характеристики при зміні електричного опору кола якоря відповідно до даних табл. 6. Нанести робочі точки й обчислити швидкості двигуна, визначити струми короткого замикання.
-
Описати та пояснити за допомогою механічних характеристик й функціональних схем способи гальмування двигуна постійного струму з незалежним збудженням. Привести переваги та недоліки кожного способу.
-
Обчислити величину додаткового електричного опору в колі якоря, що забезпечує заданий у табл. 7 максимальний момент динамічного гальмування з робочих точок пунктів завдання 12–13. Побудувати відповідні механічні характеристики.
-
Обчислити величину додаткового електричного опору в колі якоря, що забезпечує заданий у табл. 7 максимальний момент гальмування противмиканням із робочих точок пункту завдання 14. Обчислити значення моментів короткого замикання. Побудувати відповідні механічні характеристики.
Таблиця 6. Значення додаткового електричного опору
|
Варіант |
Додатковий опір |
Варіант |
Додатковий опір |
||||
|
1 |
1,1*Rя |
2,1*Rя |
3,1*Rя |
16 |
1,1*Rя |
2,1*Rя |
3,1*Rя |
|
2 |
1,2*Rя |
2,2*Rя |
3,2*Rя |
17 |
1,2*Rя |
2,2*Rя |
3,2*Rя |
|
3 |
1,3*Rя |
2,3*Rя |
3,3*Rя |
18 |
1,3*Rя |
2,3*Rя |
3,3*Rя |
|
4 |
1,4*Rя |
2,4*Rя |
3,4*Rя |
19 |
1,4*Rя |
2,4*Rя |
3,4*Rя |
|
5 |
1,5*Rя |
2,5*Rя |
3,5*Rя |
20 |
1,5*Rя |
2,5*Rя |
3,5*Rя |
|
6 |
1,6*Rя |
2,6*Rя |
3,6*Rя |
21 |
1,6*Rя |
2,6*Rя |
3,6*Rя |
|
7 |
1,7*Rя |
2,7*Rя |
3,7*Rя |
22 |
1,7*Rя |
2,7*Rя |
3,7*Rя |
|
8 |
1,8*Rя |
2,8*Rя |
3,8*Rя |
23 |
1,8*Rя |
2,8*Rя |
3,8*Rя |
|
9 |
1,9*Rя |
2,9*Rя |
3,9*Rя |
24 |
1,9*Rя |
2,9*Rя |
3,9*Rя |
|
10 |
2,0*Rя |
3,0*Rя |
4,0*Rя |
25 |
2,0*Rя |
3,0*Rя |
4,0*Rя |
|
11 |
2,1*Rя |
3,1*Rя |
4,1*Rя |
26 |
2,1*Rя |
3,1*Rя |
4,1*Rя |
|
12 |
2,2*Rя |
3,2*Rя |
4,2*Rя |
27 |
2,2*Rя |
3,2*Rя |
4,2*Rя |
|
13 |
2,3*Rя |
3,3*Rя |
4,3*Rя |
28 |
2,3*Rя |
3,3*Rя |
4,3*Rя |
|
14 |
2,4*Rя |
3,4*Rя |
4,4*Rя |
29 |
2,4*Rя |
3,4*Rя |
4,4*Rя |
|
15 |
2,5*Rя |
3,5*Rя |
4,5*Rя |
30 |
2,5*Rя |
3,5*Rя |
4,5*Rя |
Таблиця 7. Значення максимального моменту гальмування
|
Варіант |
Динамічне гальмування |
Гальмування проти-вмиканням |
Варіант |
Динамічне гальмування |
Гальмування проти-вмиканням |
|
1 |
-0,51*Mн |
-0,81*Mн |
16 |
-0,71*Mн |
-0,86*Mн |
|
2 |
-0,52*Mн |
-0,82*Mн |
17 |
-0,72*Mн |
-0,87*Mн |
|
3 |
-0,53*Mн |
-0,83*Mн |
18 |
-0,73*Mн |
-0,88*Mн |
|
4 |
-0,54*Mн |
-0,84*Mн |
19 |
-0,74*Mн |
-0,89*Mн |
|
5 |
-0,55*Mн |
-0,85*Mн |
20 |
-0,75*Mн |
-0,90*Mн |
|
6 |
-0,56*Mн |
-0,86*Mн |
21 |
-0,76*Mн |
-0,91*Mн |
|
7 |
-0,57*Mн |
-0,87*Mн |
22 |
-0,77*Mн |
-0,92*Mн |
|
8 |
-0,58*Mн |
-0,88*Mн |
23 |
-0,78*Mн |
-0,93*Mн |
|
9 |
-0,59*Mн |
-0,89*Mн |
24 |
-0,79*Mн |
-0,94*Mн |
|
10 |
-0,60*Mн |
-0,90*Mн |
25 |
-0,80*Mн |
-0,95*Mн |
|
11 |
-0,61*Mн |
-0,91*Mн |
26 |
-0,81*Mн |
-0,96*Mн |
|
12 |
-0,62*Mн |
-0,92*Mн |
27 |
-0,82*Mн |
-0,97*Mн |
|
13 |
-0,63*Mн |
-0,93*Mн |
28 |
-0,83*Mн |
-0,98*Mн |
|
14 |
-0,64*Mн |
-0,94*Mн |
29 |
-0,84*Mн |
-0,99*Mн |
|
15 |
-0,65*Mн |
-0,95*Mн |
30 |
-0,85*Mн |
-1,00*Mн |
-
Описати та пояснити за допомогою функціональних схем способи зміни напрямку руху двигуна постійного струму з незалежним збудженням.
-
Обчислити параметри та зобразити структурну схему електромеханічного перетворювача двигуна постійного струму з незалежним збудженням разом із механічною частиною у вигляді двомасової розрахункової схеми згідно пункту завдання 5.
-
Обчислити параметри та зобразити структурну схему електромеханічного перетворювача двигуна постійного струму з незалежним збудженням разом із механічною частиною у вигляді одномасової розрахункової схеми згідно пункту завдання 6.
-
Отримати й проаналізувати графік перехідного процесу струму збудження двигуна при подачі стрибком номінальної напруги збудження.
-
Отримати для усталеного режиму пункту 21 на основі результатів пункту 20 графік перехідного процесу струму якоря й швидкості під час пуску двигуна шляхом плавного підвищення до номінального значення напруги якоря за лінійним законом. Час розгону задати рівним 10-ти кратному значенню електромеханічної сталої часу електропривода. Проаналізувати отримані результати.
-
Отримати для усталеного режиму пункту 22 графік перехідного процесу струму якоря й швидкості двигуна під час зміни стрибком напруги якоря до першого значення заданого у табл. 4. Проаналізувати отримані результати.
-
Отримати для усталеного режиму пункту 23 графік перехідного процесу струму якоря й швидкості двигуна під час зміни стрибком магнітного потоку до першого значення заданого у табл. 5. Проаналізувати отримані результати.
-
Отримати на основі результатів пункту 19 графік перехідного процесу струму якоря, швидкості двигуна, пружного моменту й швидкості вантажу під час пуску двигуна шляхом плавного підвищення до номінального значення напруги якоря. Час зміни напруги якоря дорівнює значенню отриманому в пункті 22. Проаналізувати отримані результати й порівняти їх із результатами пункту 22.
МЕТОДИЧНІ ВКАЗІВКИ ДО ДОМАШНЬОЇ РОБОТИ № 1
Умовою приведення параметрів реальної кінематичної схеми до розрахункової є виконання закону збереження енергії та елементарної роботи.
Приведення моменту інерції елемента Ji , що рухається з кутовою швидкістю i , до розрахункової швидкості 1 здійснюється за формулою
 ,
,
де ![]() - передаточне число від валу приведення
до i-го валу.
- передаточне число від валу приведення
до i-го валу.
Аналогічно приводиться маса mi при поступальному русі елемента зі швидкістю Vi
![]() ,
,
де ![]() - радіус приведення.
- радіус приведення.
Переміщення та прискорення приводяться на основі відношення швидкостей елементів. Для обертального руху кутове переміщення i після приведення дорівнює
![]() ,
,
а кутове прискорення i
![]() .
.
Для поступального руху лінійне переміщення Si після приведення визначається наступною формулою
![]() ,
,
а лінійне прискорення ai
![]() .
.
При приведенні жорсткостей ci повинен виконуватися закон збереження потенціальної енергії. Для обертального руху
 ,
,
а для поступального руху
![]() .
.
В реальних системах завжди є дисипативні сили, наприклад, сили внутрішнього в’язкого тертя, які призводять до поглинання енергії механічних коливань, обумовлених пружністю механічних зв’язків. Приведення коефіцієнта в’язкого тертя (демпфірування) виконується на основі збереження енергії дисипації. Для обертального руху
 ,
,
а для поступального руху
![]() .
.
Коефіцієнти жорсткості та внутрішнього в’язкого тертя одного матеріалу зв’язані між собою залежністю
![]()
де μ=0,002 – для суцільного валу;
μ=0,004 – для валу із шпонкою чи з пружинною муфтою;
μ=0,005 – для валу із гумово-металічною муфтою;
μ=0,004 – для стальних канатів;
μ=0,006 – для гумово-тросових канатів.
Приведення моментів та зусиль здійснюється за умови рівності елементарної роботи на можливих переміщеннях. Для обертального руху приведений момент дорівнює
![]() .
.
Для поступального руху приведення зусилля здійснюється за формулою
![]() .
.
При приведенні моментів та сил до валу двигуна потрібно враховувати втрати в елементах кінематичного ланцюга (редуктори, ремінні передачі тощо). Найпростіше це зробити за допомогою сумарного ККД ланцюга, обчисленого на основі номінальних ККД цих елементів, вказаних у їх паспортних даних
![]()
Якщо знаки швидкості та моменту (сили) протилежні, то при приведенні момент (сила) ділиться на сумарний ККД
![]() ,
,
а якщо знаки співпадають, то множиться
![]() .
.
Момент механічних втрат у двигуні Мдв складає всього 15% від номінального моменту двигуна, тому при розрахунках він часто нехтується.
На основі аналізу числових значень приведених моментів інерції (мас) та жорсткостей виділяються найбільш суттєві, тобто найбільші приведені маси та найменші приведені жорсткості. На основі цього здійснюється спрощення. Декілька елементів схеми можна об’єднати в один. При цьому новий елемент буде характеризуватися еквівалентним (сумарним) моментом інерції та еквівалентною жорсткістю. При послідовному об’єднанні елементів еквівалентна жорсткість визначається за формулою
![]() ,
,
а при паралельному з’єднанні еквівалентна жорсткість дорівнює
![]()
При послідовному з’єднанні елементів еквівалентний коефіцієнт в’язкого тертя знаходиться як
![]() ,
,
а при паралельному
![]()
Згідно вищенаведеного еквівалентний момент інерції дорівнює
 ,
,
де n – кількість приведених елементів, які рухаються обертально;
k – кількість приведених елементів, які рухаються поступально.
Після спрощень найчастіше використовуються наступні три розрахункові схеми механічної частини:
-
Тримасова – для детального аналізу та якісного синтезу електромеханічних систем із двома суттєвими пружними зв’язками

-
Д
 вомасова
– найбільш адекватно відображує процеси
більшості електромеханічних систем з
одним суттєвим пружним зв’язком
вомасова
– найбільш адекватно відображує процеси
більшості електромеханічних систем з
одним суттєвим пружним зв’язком
-
Одномасова – застосовується найчастіше для синтезу та аналізу електропривода та електромеханічних систем із високою жорсткістю зв’язків або коли жорсткістю зв’язків нехтують. Усі маси замінюються однією еквівалентною

Вказані схеми механічної частини можна представити системою твердих тіл, рух яких обмежений механічними зв’язками. Найбільш загальною формою запису диференційних рівнянь, що описують рух такої системи, є відоме рівняння Лагранжа 2-го роду
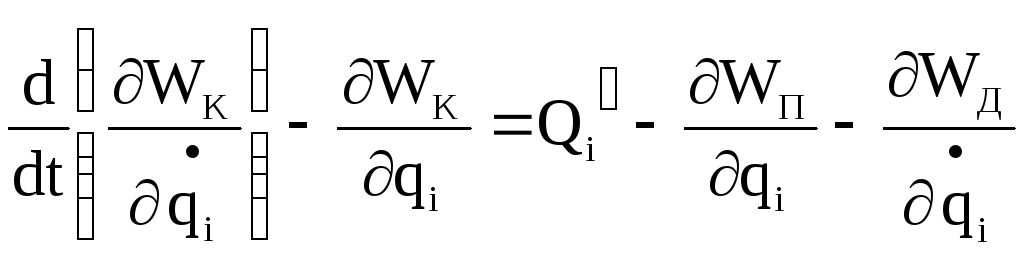 , (1)
, (1)
де WК – кінетична енергії системи;
WП – потенціальна енергії системи;
WД – енергія дисипації (розсіювання) системи;
Qi` - узагальнена сила;
qi – узагальнена координата;
![]() - узагальнена швидкість;
- узагальнена швидкість;
i – кількість рівнянь, яка визначається степенем
вільності механічної системи.
В механічній частині електропривода
кожна маса обертається на осі, тобто
має одну степінь вільності, тому кількість
рівнянь дорівнює кількості мас
розрахункової схеми. Для обертального
руху узагальненою координатою є кут
повороту валу
![]() ,
а узагальненою швидкістю – кутова
швидкість валу
,
а узагальненою швидкістю – кутова
швидкість валу
![]() .
Відповідно для поступального руху це
– лінійне переміщення
.
Відповідно для поступального руху це
– лінійне переміщення
![]() та лінійна швидкість
та лінійна швидкість
![]() .
.
Рівняння руху та структурна схема одномасової (і=1) розрахункової схеми механічної частини складаються наступним чином. Схема представляється однією масою із сумарним моментом інерції J, на яку діють момент двигуна М та статичний момент Мс . Під дією цих моментів маса рухається із швидкістю ,проходячи шлях

Для даної схеми складається рівняння
Лагранжа згідно (1). Кінетична енергія
дорівнює
![]() ,
потенціальна - WП=0, дисипації -
WД=0. Похідна кінетичної енергії
за кутом дорівнює
,
потенціальна - WП=0, дисипації -
WД=0. Похідна кінетичної енергії
за кутом дорівнює
![]()
та швидкістю
![]()
Узагальнена сила
![]()