

ЗМІСТ
1. ПРИЗНАЧЕННЯ І БУДОВА РЕДУКТОРА
1.1 Стислий опис принципу роботи і призначення редуктора........................................................................................5
1.2 Кінематична схема редуктора........................................................................................6
2 ОФОРМЛЕННЯ РОБОЧОГО КРЕСЛЕННЯ
2.1 Вимоги ЄСКД до робочого креслення........................................................................................10
2.2 Нанесення допусків на розміри деталей............................................................................................11
2.3 Нанесення допусків форми і
розміщення поверхонь деталей …………………………….15
2.4 Позначення шорсткості поверхонь деталей...........................................................................................18
3. РОЗРАХУНКИ ДОПУСКІВ І ПОСАДОК З’ЄДНАНЬ ДЕТАЛЕЙ МАШИН ЗАГАЛЬНОГО МАШИНОБУДУВАННЯ
3.1 Розрахунок допусків і посадок гладких циліндричних з’єднань...........................................................................................21
3.1.1
З’єднання 54Н8/h8.............................................................
21
54Н8/h8.............................................................
21
3.1.2
З’єднання K6/h6..............................................................24
K6/h6..............................................................24
3.1.3
З’єднання /js6............................................................26
/js6............................................................26
3.2
Розрахунок виконавчих розмірів калібрів
для з’єднання
 54Н8/h8........................................................................................29
54Н8/h8........................................................................................29
3.2.1Каліб-пробка
 Н8.....................................................29
Н8.....................................................29
3.2.2Калібр-скоба. 54h8…..................................................31
54h8…..................................................31
3.3 Розрахунок і вибір посадки з натягом
D1=54,Mкр=106
 м,....................................................................33
м,....................................................................33
3.3.1 Визначення найменшого функціонального натягу…33
3.3.2 Вибір стандартної посадки……………………….…35
3.4 Розрахунок посадки підшипника кочення 0-204………...37
3.4.1
Посадка внутрішнього кільця підшипника
на вал
 L0/k6…...................................................................................38
L0/k6…...................................................................................38
3.4.2
Посадка зовнішнього кільця підшипника
в корпус
 H7/l0......................................................................................40
H7/l0......................................................................................40
3.5
Розрахунок допусків і посадок різьбового
з’єднання
 ….........................................................................42
….........................................................................42
3.6 Розрахунок допусків і посадок шпонкового
з’єднання D2=52, L=45.................................................................44
3.6.1 Визначення параметрів і граничних розмірів
основних елементів шпонкового з’єднання………...….45 3.6.2Визначення характеру шпонкового з’єднання.................................................................................46
3.6.3 Визначення граничних розмірів неосновних
елементів шпонкового з’єднання........................................46
3.7 Розрахунок допусків і посадок шліцьового
з’єднання d – 6x23x28H7/g6 x6F8/h8…………………..……….…48
4. ВИБІР І ОБГРУНТУВАННЯ ПОСАДОК ІКВАЛІТЕТІВ ТОЧНОСТІ З’ЄДНАНЬ РЕДУКТОРА. ОФОРМЛЕННЯ СКЛАДАЛЬНОГО КРЕСЛЕННЯ
4.1 Методи вибору допусків і посадок з’єднань
деталей машин загального машинобудування............................51
4.2 Вимоги ЄСКД до складальних креслень...........................................................................................51
ПЕРЕЛІК ПОСИЛАНЬ……………………..…………………………53
-
Призначення і будова редуктора
-
Стислий опис принципу роботи і призначення редуктора
Редуктором називається передача, що встановлюється у замкненому корпусі та призначена для зниження кутової швидкості та підвищення крутного моменту на веденому валу. Передача, що розміщується в окремому корпусі і призначена для підвищення кутової швидкості веденого вала називається прискорювачем чи мультиплікатором. Встановлення передачі в окремому корпусі гарантує точність складання, краще змащування, більш високий к.к.д., менше спрацювання, а також захист від потрапляння у неї пилу та бруду.
За кількістю ступіней редуктори бувають:
-
одноступеневі циліндричні;
-
двоступеневі циліндричні;
-
трьохступеневі циліндричні;
-
багатоступеневі циліндричні.
-
одноступеневі черв’ячні;
-
двоступеневі черв’ячні.
Найбільш
прості зубчасті редуктори – одноступеневі
циліндричні – застосовують при
передаточному числі U 12,5.
Двоступеневі редуктори використовують
при U
= 12,5…6,3, а найчастіше при U=16…40.
При
передаточному числі U›60
застосовують трьохступеневі редуктори.
12,5.
Двоступеневі редуктори використовують
при U
= 12,5…6,3, а найчастіше при U=16…40.
При
передаточному числі U›60
застосовують трьохступеневі редуктори.
Редуктор працює наступним чином. Від довільного джерела енергії крутний момент передається через муфту 3 на ведений вал 4, який обертається у двох радіальних підшипниках кочення 2. На цьому валу нерухомо тримається шестерня 5, через яку крутний момент передається на колесо 1, яке вільно обертається на веденому валу 6. Цей вал встановлено на двох радіальних підшипниках кочення. При передачі синхронної кулачкової муфти 7 у праве положення, колесо 1 з’єднується з веденим валом за допомогою шліцьового з’єднання, через який крутний момент передається на робочий орган машини.
-
Кінематична схема редуктора
Кінематична схема – це умовне зображення механізму, побудоване в певному масштабі, на якому зберігаються лише ті розміри, які визначають його кінематику. На кінематичних схемах використовують стандартні позначення елементів та їх з’єднань. Кінематичні схеми поділяють на:
-
структурні кінематичні схеми;
-
принципіальні кінематичні схеми;
-
функціональні кінематичні схеми.
Структурні схеми виробу представляють або графічними зображеннями з використанням простих геометричних елементів, або аналітичним записом, допускається використання ЕВМ.
На принципіальних схемах виробу повинна бути представлена уся сукупність кінематичних елементів та їх з’єднань, призначених для здійснення, регулювання, керування та контролю заданих рухів виконавчих органів, повинні бути відображені кінематичні зв’язки, передбачені конструкцією, між окремими парами, ланцюгами і групами, а також джерелом руху.
На структурній схемі зображуються всі основні функціональні частини виробу та основні взаємозв’язки між ними. На функціональній схемі зображають функціональні частини виробу, що використовуються в процесі і зв’язки між цими частинами. Функціональні частини зображують простими геометричними фігурами (див.табл. 1.1)
Елементи кінематики на схемах позначаються за ГОСТ 2.770 – 81
Таблиця 1.1 Умовні графічні зображення елементів кінематики
|
Найменування |
Позначення |
|
а) радіальні
б) упорні
|
|






Продовження таблиці 1.1
|
Найменування |
Позначення |
|
2. Підшипники ковзання: а) радіальні
б) радіально-упорні: -односторонні
-двосторонні
Підшипники кочення
б) радіально-упорні односторонні
двосторонні
в) упорні односторонні
двосторонні
4. Муфта
|
|







































Продовження таблиці 1.1
|
Найменування |
Позначення |
|
5. Муфта нерозчеплена а) глуха б) пружна
в)
компенсируюча
6.
Муфта зчеплена: а) загальне позначення 7. Передачі зубчасті а) з прямими, косими та шевронними зубцями
|
|









































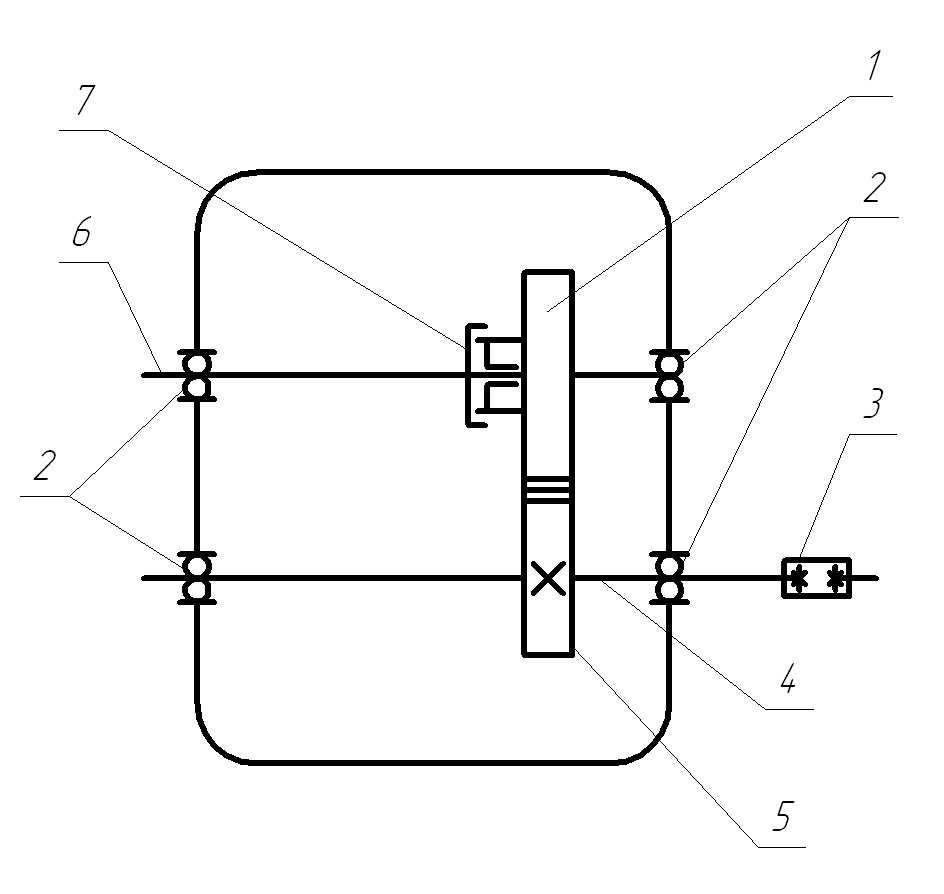
1 –колесо ведене
2 – підшипники кочення, радіальні
3 –муфта розчепна глуха
4 – вал ведучий
5 – шестерня
6 – вал ведений
7 – муфта синхронна кулачкова
Рисунок 1.1 - Кінематична схема редуктора