

1.6. Двигатели постоянного тока и их классификация
Если отсоединить генератор от первичного двигателя, т.е. исключить влияние внешней силы, но оставить прежнюю полярность полюсов и после этого подключить к нему источник постоянного электрического тока взамен электрической нагрузки, сохранив направление тока в обмотке, то в этом случае и электромагнитный момент сохранит свое направление. Однако теперь он будет вращать якорь машины в сторону, противоположную направлению вращения якоря машины, работающей в качестве генератора. Иначе говоря, при вращении якоря под действием электромагнитного момента машина будет работать в качестве электрического двигателя, преобразуя подведенную электрическую энергию в механическую.
Таким образом, одна и та же электрическая машина может работать и генератором, и двигателем. То есть, создается тормозящий электромагнитный момент или вращающий электромагнитный момент, в зависимости от того, какая энергия подводится к машине извне — механическая или электрическая.
В зависимости от способа присоединения обмоток возбуждения к якорю, двигатели постоянного тока (ДПТ) по аналогии с генератором, могут быть: а) независимого возбуждения; б) параллельного возбуждения (шунтовые); в) последовательного возбуждения (сериесные); г) смешанного возбуждения (компаундные).
В судовых установках наибольшее распространение получили двигатели параллельного и смешанного возбуждения.
Свойства ДПТ лучше всего определяются при рассмотрении их характеристик: пусковых, рабочих, механических и регулировочных.
Пусковые характеристики отражают работу машины от начала пуска до номинального режима работы. Пусковую операцию характеризуют следующие параметры: пусковой ток In пусковой момент Mn, время пуска tn, экономичность операции, а также надежность пусковой аппаратуры.
Рабочие характеристики определяют свойства двигателя в номинальном режиме работы. Это зависимости частоты вращения n, момента М, тока якоря Iя и КПД η от полезной мощности Р2 при условии, что напряжение Uн, приложенное к двигателю, есть величина постоянная и значение тока возбуждения Iв не регулируется. К рабочим относится также механическая характеристика, которая представляет собой зависимость частоты вращения от момента на валу двигателя п = f(M).
Регулировочные характеристики определяют свойства двигателя при регулировании его частоты вращения:
-
пределы регулирования от наибольшей до наименьшей частоты вращения,
-
экономичность регулирования с точки зрения затрат на оборудование и эксплуатационных расходов,
-
характер регулирования (ступенчатый или плавный),
-
простоту и надежность регулировочной аппаратуры и операций по регулированию частоты вращения двигателя.
Особое значение имеют механические характеристики двигателей.
2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ Переменного ТОКА
2.1. Устройство и принцип действия асинхронного двигателя
Асинхронный трехфазный двигатель был изобретен в 1890 г. русским инженером М. О. Доливо-Добровольским. Им же были разработаны основные модификации двигателя, сохранившиеся до наших дней.
Асинхронные двигатели с короткозамкнутым ротором имеют надежную конструкцию без скользящих контактов, недороги в изготовлении и несложны в эксплуатации. Благодаря этому они получили широкое распространение.
Работа асинхронного двигателя основана на принципе взаимодействия вращающегося поля статора с токами короткозамкнутого ротора. Протекающий по обмоткам статора трехфазный ток создает вращающийся магнитный поток, пересекая соответствующую обмотку ротора.
Механическую характеристику асинхронного двигателя в пределах рабочей части можно считать прямолинейной, проходящей через точки с координатами М = О, s = 0 (синхронная частота вращения) и М = Мн, s = sн.
Е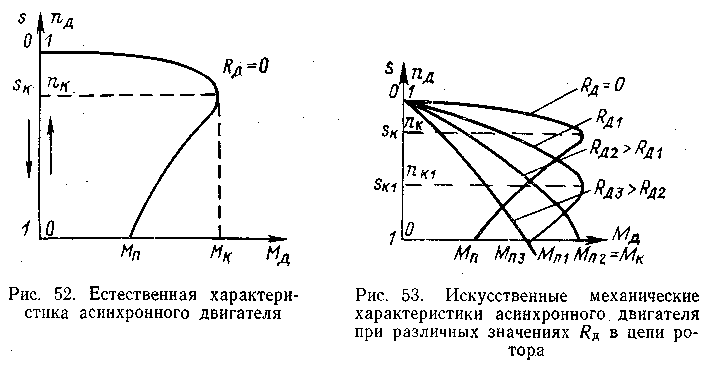 стественная
характеристика двигателя представлена
на рис. 52, где максимальному значению
момента Мк
соответствует определенное значении
скольжения sК,
названое критическим.
стественная
характеристика двигателя представлена
на рис. 52, где максимальному значению
момента Мк
соответствует определенное значении
скольжения sК,
названое критическим.
При введении в цепь ротора добавочных резисторов получим искусственные характеристики, представленные на рис. 53. При этом Мк остается тем же самым. Изменяться будет только критическое скольжение sk. Критическое скольжение для искусственной характеристики получится больше, чем для естественной. Следовательно, точка с координатами МК, sК переместится по вертикали, и искусственная характеристика расположится ниже естественной.
Необходимо иметь в виду, что превышение статическим moментом критического вызовет «опрокидывание» и последующую остановку двигателя.
Из изложенного можно сделать следующие выводы:
-
пусковой момент двигателя с короткозамкнутым ротором при больших пусковых токах незначителен;
-
малые пусковые моменты могут оказаться недостаточными для пуска двигателя и его ускорения;
-
большие токи статора и ротора ограничивают частоту пусков двигателя.
Как уже упоминалось, асинхронные двигатели, обладая малыми пусковыми моментами, в то же время имеют значительные пусковые токи. Это вызывает необходимость применения специальных способов их пуска. При пуске нужно ограничить пусковой ток и увеличить пусковой момент. Это достигается включением резисторных элементов в фазы ротора.
При ускорении двигателя по искусственной характеристике уменьшаются ЭДС, ток и момент ротора. Для сохранения ускорения привода добавочное сопротивление постепенно уменьшают, переводя работу с одной искусственной характеристики на другую. При полностью выключенном добавочном резисторе ротора двигатель начнет работать по своей естественной характеристике. Такой пуск называют пуском с симметричными сопротивлениями резисторов в роторе.
Асинхронные двигатели с короткозамкнутым ротором пускают в ход либо напрямую, либо при пониженном напряжении. Пуск напрямую — это включение статорной обмотки двигателя непосредственно в трехфазную сеть.
Такой пуск допустим для двигателей, которые при прямом включении вызовут понижение напряжения сети не более чем на 20% Uн.
Пуск при пониженном напряжении осуществляется путем включения в цепь статора с помощью автотрансформатора AT резисторных элементов или дросселей переключением обмотки статора со звезды на треугольник. Переключение осуществляется с помощью, переключателей П.
На
рис. 55 приведены схемы прямого пуска и
пуска с пониженным напряжением; они
применяются для двигателей с легкими
условиями. При тяжелых условиях пуска
используют асинхронные короткозамкнутые
двигатели специального исполнения,
такие, как двигатели с повышенным
скольжением, д войной
беличьей клеткой, глубоким пазом на
роторе.
войной
беличьей клеткой, глубоким пазом на
роторе.
Для асинхронных двигателей применимы те же три способа электрического торможения, что и для двигателей постоянного тока.
Генераторное рекуперативное торможение применяется при реактивном моменте на валу— в случае перехода с большей частоты вращения на меньшую, при активном статическом моменте (в грузовых электроприводах) — для спуска груза.
Электродинамическое торможение применяется для быстрой остановки нереверсивных электродвигателей. При этом отключают статор от сети и подают в его обмотки постоянный ток. В статоре устанавливается неподвижное магнитное поле, которое наводит в обмотках вращающегося ротора ЭДС, а следовательно, и ток. Взаимодействие поля статора с током ротора и создает тормозной момент. Двигатель, расходуя запасенную кинетическую энергию, тормозится до полной остановки.
Схемы режима и механические характеристики динамического торможения асинхронного двигателя АД даны на рис. 56, а—в.
Одновременное замыкание реле Р и выключателя ПТ не допускается. Кроме того, выключатель ПТ должен служить только разъединителем, для чего предусматривается снятие возбуждения с генератора ГПТ размыканием контакта К.ПТ, перед срабатыванием ПТ и возбуждение генератора ГПТ после включения ПТ. Для питания обмотки статора постоянным током применяются также полупроводниковые выпрямители В.
Т орможение
противовключением
может
быть осуществлено перетягивающим
грузом или переключением работающего
двигателя на противоположное направление
вращения. В обоих случаях двигатель
принудительно вращается в направлении,
противоположном рабочему. Если у
работающего двигателя поменять
местами две фазы, то это вызовет процесс
торможения противовключением.
Двигатель будет тормозиться, и, если
при достижении частоты вращений п
= 0
его не отключать от сети, произойдет
реверс. При переводе двигателей с фазным
ротором в режим противовключения
для ограничения тока в ротор вводят
добавочные резисторы — ступени
противовключений (как у двигателей
постоянного тока).
орможение
противовключением
может
быть осуществлено перетягивающим
грузом или переключением работающего
двигателя на противоположное направление
вращения. В обоих случаях двигатель
принудительно вращается в направлении,
противоположном рабочему. Если у
работающего двигателя поменять
местами две фазы, то это вызовет процесс
торможения противовключением.
Двигатель будет тормозиться, и, если
при достижении частоты вращений п
= 0
его не отключать от сети, произойдет
реверс. При переводе двигателей с фазным
ротором в режим противовключения
для ограничения тока в ротор вводят
добавочные резисторы — ступени
противовключений (как у двигателей
постоянного тока).
В практике для получения регулируемой частоты используются специальные синхронные генераторы или преобразователи переменной частоты на полупроводниковых устройствах. все большее применение находит регулирование частоты вращения асинхронных двигателей изменением числа пар полюсов.
Выпуск многоскоростных двигателей переменного тока во многих случаях приводит к отказу от двигателей постоянного тока. В настоящее время широко применяются двух-, трех- и четырехскоростные короткозамкнутые АД, у которых регулирование частоты вращения осуществляется либо при помощи двух самостоятельных обмоток на статоре, либо переключением секционированных групп одной обмотки на различные числа пар полюсов.