

Цель работы:
Исследование статических характеристик двигателя постоянного тока и генератора постоянного тока с независимым возбуждением, как элементов разомкнутой системы управления.
-
Общее описание разомкнутой системы управления
[Двигатель - Генератор постоянного тока – Тахогенератор]
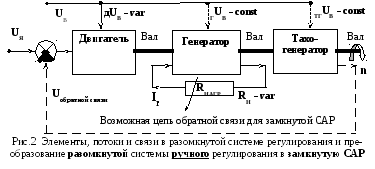
Система, состоящая из [двигателя - генератора постоянного тока – тахогенератора], приведенная на рисунке 1 в виде схемы соединения электрических и электромашинных элементов, относится к РАЗОМКНУТЫМ системам ручного управления. На базе этой схемы реализуются различные ЗАМКНУТЫЕ Системы Автоматического Регулирования, поддерживающие постоянство числа оборотов двигателей n или величину тока генератора, работающего на электрическую нагрузку. Данная разомкнутая система относится к электромашинным системам, работоспособность которых обуславливается тремя основными физическими процессами: электрическими, электромагнитными и механическими, протекающими внутри и между элементами этой системы.
 Базовым
элементом в таких системах является
электродвигатель,
который
может управляться двумя напряжениями
- UЯ
и UВ
(рисунки 1,2).
Базовым
элементом в таких системах является
электродвигатель,
который
может управляться двумя напряжениями
- UЯ
и UВ
(рисунки 1,2).
На рисунке 1 представлена электромеханическая схема разомкнутой системы ручного управления, которая работает по разомкнутой цепи, т.е. когда выходная координата системы (число оборотов n или величина тока генератора IГ) не оказывают обратного воздействия на источник их изменений – на изменение UЯ и/или UВ. Для этой системы внешне заданные ручным образом изменения напряжений UЯ и UВ воздействуют на внутренние электрические и электромагнитные процессы и за счет магнитомеханических процессов вызывают соответствующее изменение числа оборотов n и/или величины тока генератора IГ.
Для замкнутой САР в данную схему следует ввести цепь обратной связи,
к оторая
на рисунке 2 представлена пунктирной
линией. Технически эта связь может быть
выполнена, например - в виде дополнительной
электрической цепи, которая реализует
операцию сравнения и выработки сигнала
рассогласования (ошибки)
между задающей
величиной (так, например - UЯ)
и
сигналом
обратной связи UОС.
Эта операция
выполняется соответствующим элементом
сравнения, который отсутствует в данной
лабораторной работе.
оторая
на рисунке 2 представлена пунктирной
линией. Технически эта связь может быть
выполнена, например - в виде дополнительной
электрической цепи, которая реализует
операцию сравнения и выработки сигнала
рассогласования (ошибки)
между задающей
величиной (так, например - UЯ)
и
сигналом
обратной связи UОС.
Эта операция
выполняется соответствующим элементом
сравнения, который отсутствует в данной
лабораторной работе.
Чтобы перейти от конструкционно-технологического описания этой разомкнутой системы ручного управления к экспериментально-исследовательской оценке её работы, следует выделить набор базовых физических процессов, протекающих внутри системы, и представить их математическое описание. Следующим этапом оценки этой системы является исследовательская оценка процессов преобразования внутри системы - на основе схемной оценки связей, следующих из их математического описания.
-
Основные характеристики
ДВИГАТЕЛЯ И ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
2.1 Электромеханические процессы и схемы для двигателя
При подключении якоря двигателя постоянного тока к управляющему постоянному напряжению UЯ это напряжение, согласно законам электротехники, уравновешивается падением напряжения IЯ RЯ на активном сопротивлении цепи якоря RЯ и противо-э.д.с. якоря ЕЯ (рисунок 1):
U Я
= ЕЯ
+ IЯ
RЯ (1)
Я
= ЕЯ
+ IЯ
RЯ (1)
Уравнение (1) можно представить в форме схемы причинно-следственных отношений, включающих операции преобразования причины (входного сигнала) в следствие - в выходной сигнал. Причиной для работы всей системы разомкнутого регулирования является сигнал (напряжение) UЯ –рисунки 1, 2 и 3. Относительно этого напряжения могут быть представлены две схемы: схема преобразования «следствий в причину» и схема преобразований «причины в следствие». Различие между схемами заключается в нарушении логики преобразований в системе.
Первая схема имеет вид, представленный на рис. 4а. Вторая – на рис. 4б. Обе схемы реализуются простейшими преобразователями, формирующими информационно-операционные схемы (модели) любых процессов. Такими операциями преобразования «причины в следствие» являются
-
о
 перация
«суммирования» (в форме условного
обозначения ),
перация
«суммирования» (в форме условного
обозначения ), -
о
 перация
«вычитания» - «сравнения»
(в форме условного обозначения
),
перация
«вычитания» - «сравнения»
(в форме условного обозначения
), -
операция «умножения» на «параметр RЯ» (в форме условного обозначения преобразователей - - любого типа и любой природы: - физической, химической, математической, информационной, социальной, …).
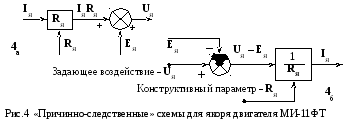 В
дальнейшем, при представлении общей
схемы причинно-следственных преобразований
в установке, будет использоваться схема
по рисунку 4б.
В
дальнейшем, при представлении общей
схемы причинно-следственных преобразований
в установке, будет использоваться схема
по рисунку 4б.
В свою очередь, противо-э.д.с. якоря ЕЯ пропорциональна скорости вращения якоря n и магнитному потоку возбуждения Фв. Поток же Фв создается напряжением возбуждения Uв, которое подается на обмотку возбуждения Wв.
ЕЯ = С1 Фв n = С2 Uв n (2)
где С1, С2 - конструктивные постоянные.
Е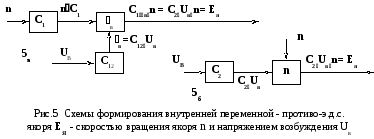 сли
уравнение (2) представить в виде схемы,
где последовательно отражены этапы
преобразования входных (причинных)
координат UВ
и n в
выходную координату Ея
– следствие этих преобразований, то
оно будет иметь вид, представленный на
рисунке 5а.
Если для этой схемы исключить внутреннюю
переменную магнитного потока возбуждения
в,
то схема преобразуется в обобщенную
схему (рисунок 5б).
сли
уравнение (2) представить в виде схемы,
где последовательно отражены этапы
преобразования входных (причинных)
координат UВ
и n в
выходную координату Ея
– следствие этих преобразований, то
оно будет иметь вид, представленный на
рисунке 5а.
Если для этой схемы исключить внутреннюю
переменную магнитного потока возбуждения
в,
то схема преобразуется в обобщенную
схему (рисунок 5б).
Из уравнения (1) следует, что при вращении якоря с некоторым числом оборотов n, которое зависит от внешних условий – так, например - от нагрузки, приложенной к валу двигателя, другая внутренняя переменная - величина тока якоря IЯ (как результат процессов в системе [двигатель-генератор]) - определяется соотношением:
![]() (3)
(3)
В выражении (3) координата UЯ является внешним задающим воздействием (внешней причиной), которое частично компенсируется внутренней переменной системы (в форме ЕЯ) под действием внутренних процессов, происходящих внутри системы [двигатель-генератор]. Эти внутренние процессы вызываются другой внешней причиной - нагрузкой для генератора.
Выражение для IЯ (3), как для внутренней переменной (следствия) в системе, на которую действуют все внешние возмущения, следует из уравнения (1) при выполнении логики причинно-следственных преобразований по отношению к внешней задающей причине UЯ (согласно схемы на рисунке 4б).
В свою очередь зависимость скорости вращения n, как выходной базовой переменной всей этой электромеханической системы, от внешних и внутренних факторов (UЯ, UВ и IЯ )имеет вид
![]() (4)
(4)
П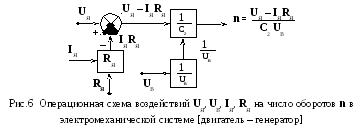 редставим
зависимость (4) в виде схемы по отношению
к управляющим воздействиям UЯ,
UВ,
внутренней переменной IЯ,
конструктивному параметру RЯ
и к константе преобразования С2
, учитывающей преобразования ЕЯ
от напряжения возбуждения UВ.
Тогда схема причинно-следственных
преобразований в системе [двигатель -
генератор постоянного
тока]
будет иметь следующий вид (рисунок 6).
редставим
зависимость (4) в виде схемы по отношению
к управляющим воздействиям UЯ,
UВ,
внутренней переменной IЯ,
конструктивному параметру RЯ
и к константе преобразования С2
, учитывающей преобразования ЕЯ
от напряжения возбуждения UВ.
Тогда схема причинно-следственных
преобразований в системе [двигатель -
генератор постоянного
тока]
будет иметь следующий вид (рисунок 6).
Исходя из выражения (4) и согласно рисунка (6) регулирование скорости двигателя может быть осуществлено путем изменения: напряжения якоря UЯ, напряжения возбуждения UВ и сопротивления в цепи якоря RЯ.
2.1.1 Зависимость n = f(IЯ) при постоянных значениях напряжения якоря UЯ, напряжения возбуждения UВ и сопротивления в цепи якоря RЯ называется скоростной характеристикой.
2.1.2 Из курса электрических машин известно, что между током в цепи его якоря IЯ и создаваемым за счет этого тока вращающим моментом М, который может быть достигнут двигателем, существует зависимость:
М = С3 IЯ UВ (5)
Из уравнения 5 можно выразить внутреннюю переменную IЯ и ввести её в уравнение (4) для скорости вращения двигателя n.
Эта зависимость скорости вращения двигателя n от величины вращающего момента (момента нагрузки) М при постоянных значениях напряжений якоря UЯ и возбуждения UВ и при постоянном значении сопротивления в цепи якоря RЯ называется механической характеристикой:
![]() (6)
(6)
Е
UB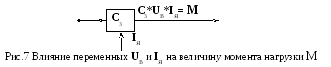 сли
уравнение (5) представить также в виде
операционной схемы причинно-следственных
преобразований, то оно будет иметь
следующий вид (рисунок 7).
сли
уравнение (5) представить также в виде
операционной схемы причинно-следственных
преобразований, то оно будет иметь
следующий вид (рисунок 7).
Н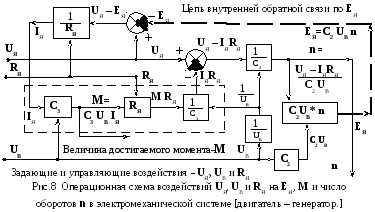 а
основе уравнения (6) можно представить
обобщающую
схему операционных преобразований по
отношению к набору входных
задающих и управляющих воздействий -
UЯ,
UВ
и RЯ,
представленных в правой части выражения
(6). Одновременно учтем зависимость
выходных
переменных
ЕЯ,
n, M от этих
же координат (переменных). В этом случае
к схеме, представленной на рисунке 6
необходимо добавить схемы, приведенные
на рисунках 4б,
5б
и 7. Тогда объединенная обобщающая схема
относительно комплекса внутренних
процессов ЕЯ
и IЯ
в системе [двигатель - генератор],
разрешенная относительно ЕЯ
и механических характеристик n
и M
будет иметь вид, который представлен
на рисунке 8.
а
основе уравнения (6) можно представить
обобщающую
схему операционных преобразований по
отношению к набору входных
задающих и управляющих воздействий -
UЯ,
UВ
и RЯ,
представленных в правой части выражения
(6). Одновременно учтем зависимость
выходных
переменных
ЕЯ,
n, M от этих
же координат (переменных). В этом случае
к схеме, представленной на рисунке 6
необходимо добавить схемы, приведенные
на рисунках 4б,
5б
и 7. Тогда объединенная обобщающая схема
относительно комплекса внутренних
процессов ЕЯ
и IЯ
в системе [двигатель - генератор],
разрешенная относительно ЕЯ
и механических характеристик n
и M
будет иметь вид, который представлен
на рисунке 8.
Механическая характеристика двигателя будет “жёсткой”, если, при изменении нагрузки [от холостого хода - до максимальной], скорость двигателя n будет падать не более чем на 5-15%. В противном случае двигатель будет иметь “мягкую характеристику”.
2.1.3 Зависимость n = f(UЯ) при постоянных значениях М*RЯ и Uв называется регулировочной характеристикой двигателя с якорным управлением.
При этом скорость двигателя n изменяется пропорционально изменению питающего якорного напряжения UЯ, угол наклона регулировочной характеристики остается неизменным, а скорость холостого хода растет с увеличением напряжения питания якоря UЯ, т.е. при различных значениях напряжения питания якоря UЯ регулировочные характеристики прямолинейны и параллельны между собой.
2.1.4 При полюсном управлении, когда изменяется напряжение возбуждения Uв, происходит изменение обоих членов уравнения (6). С уменьшением напряжения возбуждения Uв при стабилизации напряжения в цепи якоря UЯ происходит очень сильное увеличение второго члена, что приводит к существенному уменьшению жёсткости характеристики двигателя. Регулировочные характеристики двигателя с полюсным управлением нелинейные. При малых нагрузках и малых значениях управляющего сигнала скорость n такого двигателя резко возрастает и может превысить допустимые значения.
При введении в цепь якоря дополнительного сопротивления RДОП = RЯ жёсткость характеристики уменьшается. Величина добавочного сопротивления RДОП не влияет на величину скорости холостого хода.