

Мо и дисперсия полилинейной функции
![]() равно той же функции от МО аргументов
(Лекция 3):
равно той же функции от МО аргументов
(Лекция 3):
|
|
(9.7) |
 .
.Дисперсию полилинейной функции можно представить как комбинацию элементов корреляционной матрицы:
|
|
(9.8) |

Мо и дисперсия произведения св
|
|
(9.9) |
Таким же свойством обладают и МО произведений степеней независимых СВ – начальные моменты:
|
|
(9.10) |
Для дисперсии произведения независимых СВ, используя известную связь между центральными и начальными моментами, получим
|
|
(9.11) |
 ,
,а если
все Xi
центрированы (![]() ),
дисперсия их произведения равна
произведению дисперсий.
),
дисперсия их произведения равна
произведению дисперсий.
Мо и корреляционная матрица векторной линейной функции
![]() имеет
МО
имеет
МО
![]() и корреляционную матрицу, полученную
умножением элементов матрицы K(X)
на a2. Линейная
комбинация некоррелированных случайных
векторов имеет МО и корреляционную
матрицу в виде линейной комбинации
соответствующих характеристик слагаемых
векторов (обобщение теоремы о корреляционной
матрице суммы некоррелированных
случайных векторов):
и корреляционную матрицу, полученную
умножением элементов матрицы K(X)
на a2. Линейная
комбинация некоррелированных случайных
векторов имеет МО и корреляционную
матрицу в виде линейной комбинации
соответствующих характеристик слагаемых
векторов (обобщение теоремы о корреляционной
матрице суммы некоррелированных
случайных векторов):
![]() ,
,
![]() ,
,
![]()
Пример 4: дисперсия суммарной ошибки в однократной коррекции
Dz = (– a)2 P(X > 0) + a2P(X < 0) = a2.
Корреляционный момент выразим через параметры , a с учетом того, что X и Z центрированы:
Kxz =
M[XZ] =  .
.
Теперь из условия минимума дисперсии суммарной ошибки
![]()
получим оптимальное значение a* и минимальную дисперсию:
 0,362.
0,362.
Метод линеаризации функций
![]() .
.
С учетом того, что M[x – mx] = 0, по линеаризованной функции имеем:
-

(9.12)
(9.13)
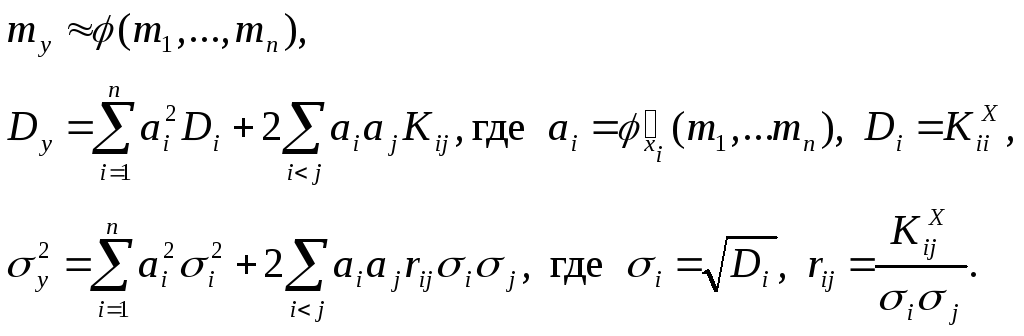
Если Y – функция нескольких случайных аргументов Y = (X1, …, Xn), известны МО mi = M[Xi] и корреляционная матрица K системы (X1, …, Xn), ЧХ линеаризованной функции
-

(9.14)
можно определить по формулам:
|
|
(9.15) (9.16) (9.17) |
Если система (X1, …, Xn) некоррелирована,
|
|
(9.18) |