

Хід роботи:
-
Створити кінематичну схему редуктора;
-
Задати початкові дані;
-
Встановити передаточні числа;
-
Вказати режим роботи;
-
Вибрати матеріал валів;
-
Виконати розрахунок кінематичної схеми та вивести результати;
-
Створити збірне креслення редуктора та окремих елементів редуктора;
-
Оформити та проаналізувати отримані результати.
Таким чином, за допомогою модуля APM Drive в індивідуальній роботі необхідно розрахувати редуктори, які входять до прийнятої кінематичної схеми приводу робочого органа (із урахуванням отриманих даних кінематичного розрахунку у р.3).
Приклад 5.2. Розрахунок редуктора довільної структури в модулі APM Drive.
За допомогою інструментів програми необхідно створено кінематичну схему з циліндричною, конічною, планетарною передачами:

Вказуються початкові дані:

Якщо автоматично підібрані значення передаточних чисел для передач необхідно змінити, то це виконується вручну:

Задається режим роботи:

Задаються матеріали валів:


Виконується загальний розрахунок та наводяться результати:
циліндрична передача





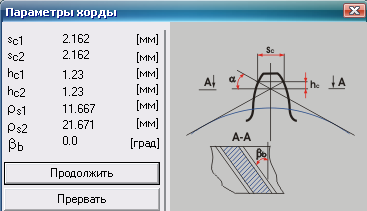


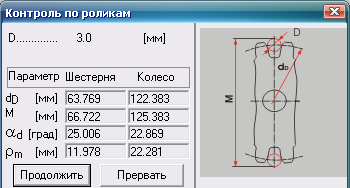


Потім вибирається зображення ведомого (або ведучого) зубчастого колеса та вказуються його параметри:





Аналогічні дії виконуються для інших зубчастих передач.
Наводяться результати розрахунку підшипників кочення:








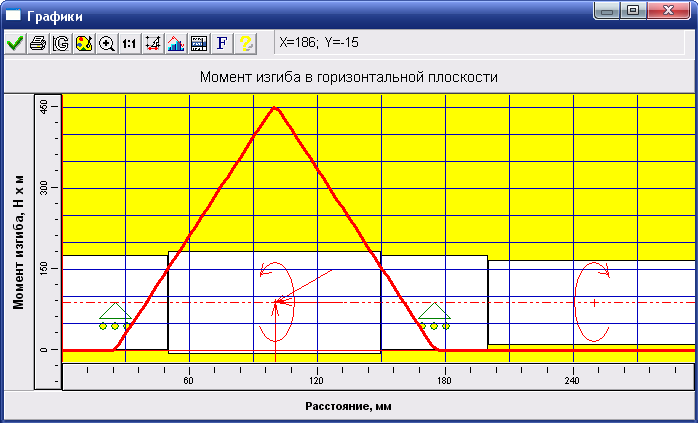
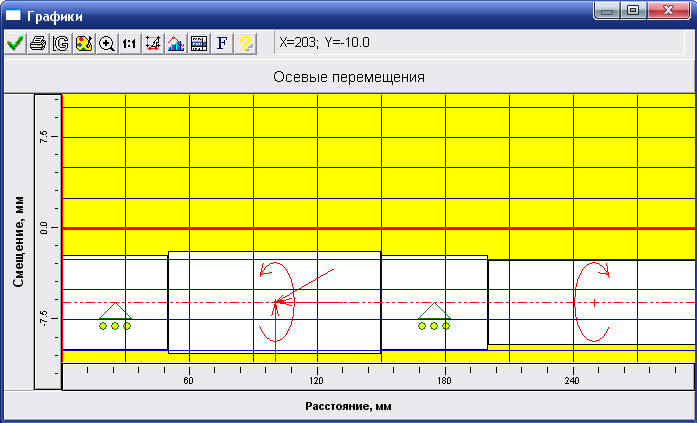
Наводяться результати розрахунків валів редуктора.
Реакції в опорах


Момент згину у вертикальній площині Момент згину у горизонтальній площині

Кут згину у вертикальній площині Кут згину у горизонтальній площині


Поперечні сили у вертикальній площині Поперечні сили у горизонтальній площині


Осьові сили Осьове переміщення

Переміщення у вертикальній площині Переміщення у горизонтальній площині


Момент кручення Кут кручення


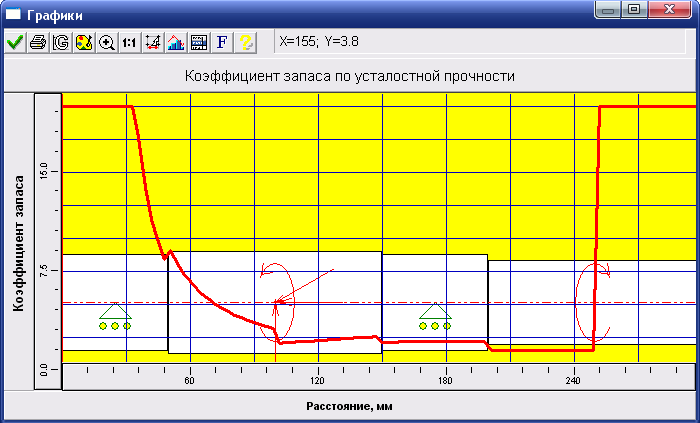
Еквівалентне напруження Коефіцієнт запасу по втомлюваній міцності

Реакції в опорах


Момент згину у вертикальній площині Момент згину у горизонтальній площині


Кут згину у вертикальній площині Кут згину у горизонтальній площині


Поперечні сили у вертикальній площині Поперечні сили у горизонтальній площині


Осьові сили Осьове переміщення


Переміщення у вертикальній площині Переміщення у горизонтальній площині


Момент кручення Кут кручення


Еквівалентне напруження Коефіцієнт запасу по втомлюваній міцності


Креслення редуктора програма виконує автоматично з можливістю подальшого редагування.
Таким чином, в результаті розробки приводу РО в середовищі АРМ WinMachine можна отримати дійсні геометричні параметри передач, значення сил в зачепленнях та багото інших параметрів. Збірні креслення редукторів дають змогу конструкторам-проектувальникам ще раз оцінити правильність прийнятих рішень та за необхідності виконати корегування приводу робочого органа.