

1.Линейные пространства (определение, примеры): Множество L называется линейным пространством, а его элементы векторами, если:
- задан закон, по которому любым двум
элементам из множества L
сопоставляется элемент z,
принадлежащий L, и называется
суммой x и y.
![]()
- задан закон умножения оператора на
число, по которому элементу x
из множества L и числу α,
соотв. элем. y![]() L, такой, что y=
αx.
L, такой, что y=
αx.
![]()
- для любых x,y
и z![]() L
и любых чисел α,β выполняются следующие
аксиомы
L
и любых чисел α,β выполняются следующие
аксиомы
![]() и
и
![]() :
:
1. x+y=y+x 2. (x+y)+z=x+(y+z) 3.
![]() такой эл-т О (нулев. эл-т)
такой эл-т О (нулев. эл-т)
![]()
4.
![]() ,
,
![]() ,
((-х) – противоположный элемент)
,
((-х) – противоположный элемент)
5. α(x+y)= αx+ αy 6.( α+β)x= αx+βx 7. α(βx)=(αβ)x 8. x*1=x
Прим: 1) v- множество векторов на плоскости; v – линейное пространство
2)p – множество многочленов от 1ой переменной степени не выше 5; p - линейное пространство.
2.Линейная зависимость (независимость)
векторов:
![]() - вектора, принадлежащие L,
- вектора, принадлежащие L,
![]() - вещественные числа.
- вещественные числа.
Выражение вида
![]() называется
линейной комбинацией векторов
называется
линейной комбинацией векторов
![]() с коэффициентами
с коэффициентами
![]() .
.
Система векторов
![]() называется
линейно зависимой, если существует
равная О нетривиальная (невырожден. –
хотя бы 1 из коэффициентов отличен от
нуля) линейная комбинация этих векторов.
В противоположном случае система
называется линейно независимой.
называется
линейно зависимой, если существует
равная О нетривиальная (невырожден. –
хотя бы 1 из коэффициентов отличен от
нуля) линейная комбинация этих векторов.
В противоположном случае система
называется линейно независимой.
![]()
![]()
Система векторов линейно зависима тогда, когда, по крайней мере, один из этих векторов является линейной комбинацией остальных.
Доказательство: 1. необходимо
Пусть
![]() - линейно зависимая система векторов
- линейно зависимая система векторов
Пусть
![]()
![]()
Следовательно,
![]() линейная комбинация векторов.
линейная комбинация векторов.
2. Достаточно.
Пусть
![]() (линейная комбинация векторов)
(линейная комбинация векторов)
(-1)*![]()
т.к.![]() ,
следовательно, система векторов линейно
зависима.
,
следовательно, система векторов линейно
зависима.
Если в систему векторов входит нулевой вектор, то эта система будет линейно зависима.
Если какая-либо часть системы линейных векторов линейно зависима, то и вся эта система линейно зависима.
3. Базис. Координаты вектора. Размерность
пространства. Система линейно
независимых векторов
![]() называется базисом пространства L,
если любой вектор x из
этого пространства может быть представлен
в виде линейной комбинации этих векторов.
называется базисом пространства L,
если любой вектор x из
этого пространства может быть представлен
в виде линейной комбинации этих векторов.
![]() А числа
А числа
![]() называются координатами вектора
относительно данного базиса. Если задан
базис, то координаты вектора в данном
базисе определены однозначно.
называются координатами вектора
относительно данного базиса. Если задан
базис, то координаты вектора в данном
базисе определены однозначно.
Доказательство:
Пусть
![]() - базис. Предположим, что x
разложен двумя способами.
- базис. Предположим, что x
разложен двумя способами.
![]()
![]()
![]() =
=![]() =0
=0
Т.к. линейная комбинация = 0, а вектора
![]() линейно независимы
линейно независимы
![]() =0,
следовательно
=0,
следовательно
![]() .
.
Пусть в линейном пространстве L
выбран базис
![]() ,
тогда:
,
тогда:
-
при сложении векторов их координаты складываются.
-
При умножении вектора на число его координаты умножаются на это число.
Доказательство: 1. x![]() L,
y
L,
y![]() L,
L,
![]() ,
,
![]() ,
,
![]()
2. α – число
![]()
Если в линейном пространстве L существует базис из n векторов, то любой другой базис этого пространства так же содержит n векторов.
Линейное пространство L, в котором базис состоит из n векторов называется n-мерным, а число n - размерностью пространства Ln
4.Подпространство. Линейное
нормированное пространство. Евклидово
пространство. Непустое множество
Z векторов в линейном
пространстве L называется
линейным подпространством, если для
любых х и y принадлежащих
Z: (x+y)=Z
и для любого вектора x![]() Z
Z
![]() α- число (αx)
α- число (αx)
![]() Z.
Z.
Множество называется линейным
нормированным пространством, если для
любого вектора х, принадлежащего этому
множеству поставлено в соответствие
вещественное число x![]() - вещественное число, называемое нормой
элемента х, причем выполняются следующие
условия:
- вещественное число, называемое нормой
элемента х, причем выполняются следующие
условия:
-
Если норма
 =0,
то х=0.
=0,
то х=0. -
Для любого числа α
 R
или α
R
или α С,
С,

 норма от произведения αх будет
норма от произведения αх будет
-
Для любого элемента х, y, принадлежащего Н
 .
.
Линейное пространство называется евклидовым, если в этом пространстве определено скалярное произведение векторов. Каждому x и y поставлено в соответствие действительное число (x,y), причем выполняется следующее:
1. (x,y)=(y,x) 2. (λx,y)= λ(x,y)=(x, λy) 3. (x1+x2,y)=(x1,y)+(x2,y)
4. (x,y)![]() 0 5.
0 5.
![]() (
(![]() )
)
Норма вектора x, равен
![]() в евклидовом пространстве называется
длиной вектора и обозначается
в евклидовом пространстве называется
длиной вектора и обозначается
![]() =
=
Вывод:
-
Если x и y принадлежат евклидовому пространству размерности n, тогда (x,y)=

-
x,y
 и ортогональны, если их скалярное
произведение = 0 ((x,y)=0)
и
и ортогональны, если их скалярное
произведение = 0 ((x,y)=0)
и
 ,
,
Система ненулевых векторов образует
ортогональный базис в
![]() ,
если эти вектора попарно ортогональны,
и ортонормальный базис, если каждый из
векторов имеет длину =1.
,
если эти вектора попарно ортогональны,
и ортонормальный базис, если каждый из
векторов имеет длину =1.
5.Линейные операторы (определение,
примеры). Пусть H и F
– линейные пространства. Оператором
A, действ. из H
в F называется отображение
вида A : Н
![]() F. Сопост. любому
F. Сопост. любому
![]() элементу
элементу
![]()
y=A(x)=Ax
Оператор А называется линейным, если
для любых х1,х2
![]() H ,
H ,
![]() число.
число.
1.![]()
2.![]()
Примечание:
1.А-умножается на число
![]() ,
,![]() -число,
x-вектор,
-число,
x-вектор,
![]()
![]()
![]() A-линейный
оператор
A-линейный
оператор
2. M n –линейное пространство,A-оператор дифференц.
![]()
![]()
![]()
![]() -линейный
оператор
-линейный
оператор
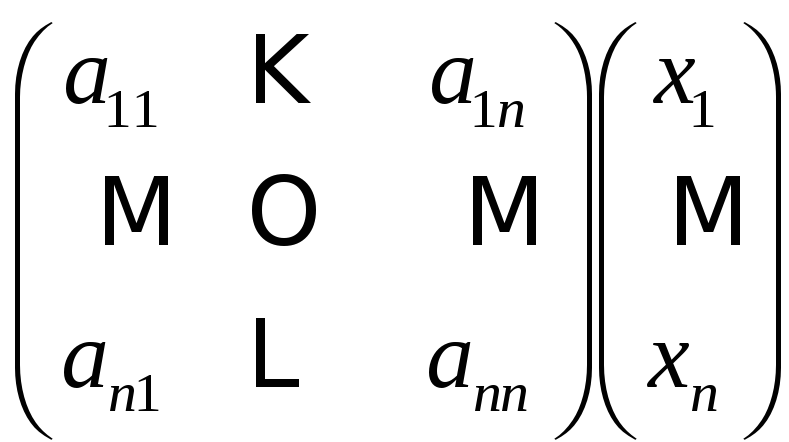
6.Матрица линейного оператора.
Образуется следующим образом:
![]()
матрица:
Пусть в заданном базисе
![]() лин. простр.
лин. простр.
![]() каждому линейному опреатору А отвечает
матрица
каждому линейному опреатору А отвечает
матрица
![]() ,
,
![]() ,
тогда при сложении линейных операторов
соответствующие им матрицы складываются,
при умножении матрицы на число
соответствующая матрица умножается на
число, при умножении операторов
соответствующие матрицы перемножаются.
,
тогда при сложении линейных операторов
соответствующие им матрицы складываются,
при умножении матрицы на число
соответствующая матрица умножается на
число, при умножении операторов
соответствующие матрицы перемножаются.
7.Действия с линейными операторами.
Два линейных оператора A
и B называются равными и
принадлежат тому же пространству, если
результат их действий на один и тот же
элемент х, принадлежащий к
![]() дает один и тот же элемент y.
дает один и тот же элемент y.
Ax=y, Bx=y, следовательно, А=В.
Под суммой двух операторов А и В понимают
третий оператор С, полученный в результате
действий каждого из операторов на
элементе х, принадлежащему к
![]() и
суммирование результатов действий.
и
суммирование результатов действий.
А+В=В+А; А+В+D=(A+B)+D=A+(B+D)
Произведением двух операторов называется оператор который получен в результате последовательно выполнения данных операторов, причем сначала действует тот оператор, который стоит ближе к элементу. A*Bx=A(Bx)
Если для любого х, принадлежащего
![]() ,
Ex=x, то Е –
единичный оператор.
,
Ex=x, то Е –
единичный оператор.
Свойства произведения:
1. A*Ex=Ax=E*Ax 2.![]() x=A(Ax) 3.A*B(C)x=A(BC)x=(AB)Cx
x=A(Ax) 3.A*B(C)x=A(BC)x=(AB)Cx
4. (A+B)Cx=ACx+BCx 5. Если A*A-1x= A-1*Ax=Ex=x, то A-1-обратный оператор.
8. Преобразование матрицы линейного оператора при переходе к новому базису.
А – линейный оператор. Ах=у, (х,у![]() )
)
![]() -
базис в
-
базис в
![]() ;
;
![]()

![]() =
=![]()
![]() - новый базис.
- новый базис.
Т – матрица перехода от старого базиса к новому.
А![]() А’,
x
А’,
x![]() x’,
y
x’,
y![]() y’,
Ax’
y’,
Ax’![]() y’
y’
x=Tx’; y=Ty’.
Пусть
![]() Ax=Atx’;
y=Atx’;
Ty’=ATx’;
y’=T-1ATx’;
A’x’=
T-1ATx’;
Ax=Atx’;
y=Atx’;
Ty’=ATx’;
y’=T-1ATx’;
A’x’=
T-1ATx’;
A’= T-1AT – формула перехода.
При переходе линейного оператора из
базиса в базис матрица линейного
оператора меняется, а определитель
остается прежним.
![]()
![]()
9.Собственные значения и собственные вектора линейных операторов:
Пусть
![]() ,
А- линейный оператор в
,
А- линейный оператор в
![]() ,
вектор
,
вектор
![]() ,
удовлетворяющий соотношению
,
удовлетворяющий соотношению
![]() ,
называется собственным вектором, а
собственное число
,
называется собственным вектором, а
собственное число
![]() -собственным
значением линейного оператора А.
-собственным
значением линейного оператора А.
Пусть
![]() -
прямая, тогда любой вектор на этой прямой
является собственным.
-
прямая, тогда любой вектор на этой прямой
является собственным.
В комплексном пространстве
![]() всякий линейный оператор А имеет хотя
бы один собственный вектор.
всякий линейный оператор А имеет хотя
бы один собственный вектор.
Доказательство:
1.
![]()
2.
![]()
3. Пусть
![]()
![]()
![]()
4.
(*)
5.Пусть х- собственный
![]()
 ,
заменим
,
заменим
![]() в (*)
в (*)
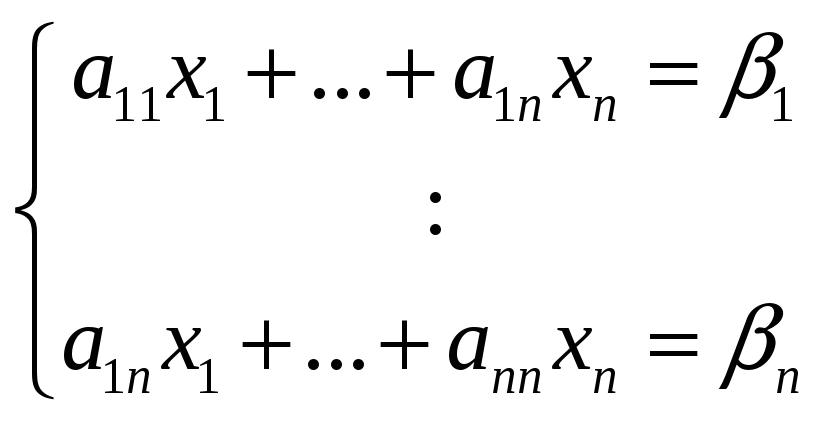
(**)
(**)- однородная система линейных уравнений, всегда имеет тривиальное решение, а чтобы имела нетривиальное, необходимо, чтобы определитель системы = 0.
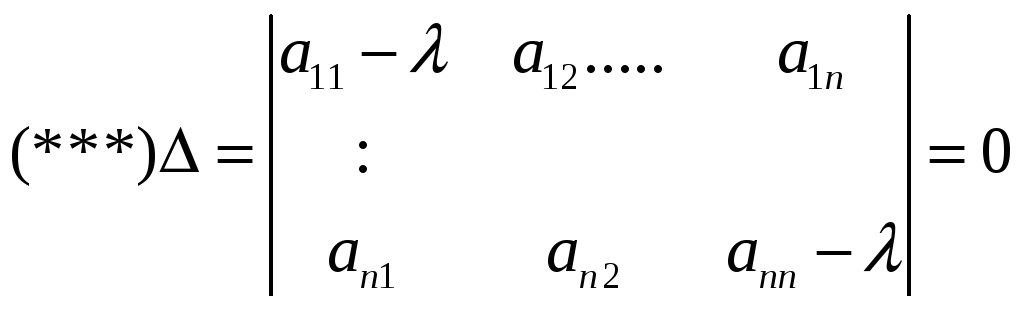
Пусть
![]() -
корень уравнения n-ой
степени относительно
-
корень уравнения n-ой
степени относительно
![]() (***)
(***)
Подставим в систему (**)
![]() -
собственный вектор
-
собственный вектор
![]() Для каждого собственного числа имеется
свой вектор.
Для каждого собственного числа имеется
свой вектор.
10. Свойства собственных значений и собственных векторов линейного оператора.
![]() - характеристический многочлен А, а
следовательно, и собств.значен.А не
зависят т выбора базиса, а определяются
только самим оператором.
- характеристический многочлен А, а
следовательно, и собств.значен.А не
зависят т выбора базиса, а определяются
только самим оператором.
Собственный вектора оператора А, соответствуют различным собственным знчениям, линейно независ.
Если характеристический многочлен оператора А имеет n различных корней, то матрица А может быть приведена к диагональной форме.
Рассмотрим матрицу линейного оператора
А в базисе из собственных векторов, т.к.
все значения различны, то:
1. А – матрица линейного оператора в
диагональном виде.
![]()
![]()
![]() - сумма диагональных элементов
- сумма диагональных элементов
![]()
![]() - сумма главных миноров II
порядка
- сумма главных миноров II
порядка
![]() - определитель A
- определитель A
2. А – треугольная матрица, то собственными
числами будут числа, стоящие на диагонали
![]()
![]()
![]()
11.Квадратичные формы. Определение. Примеры.
К.ф. – многочлен второй степени,
относительно переменных
![]() не содержит свободного члена и члена в
первой степени.
не содержит свободного члена и члена в
первой степени.![]()
Числа
![]() называются
коэффициентами квадратичной формы.
называются
коэффициентами квадратичной формы.
Если
![]() - к.ф., тогда если мы умножаем каждую
переменную на действит. α
- к.ф., тогда если мы умножаем каждую
переменную на действит. α
![]()
Примечание:
![]()
![]()
Квадратичная форма может быть записана в матричном виде:
![]() =
=![]()
Обозначим за х матричный столбец![]() ,
следовательно,
,
следовательно,
![]() =xTAx
(A- матрица квадратичной
формы). Если при изменении базиса
координаты вектора х меняются, то есть
=xTAx
(A- матрица квадратичной
формы). Если при изменении базиса
координаты вектора х меняются, то есть
![]() ,
то к.ф.
,
то к.ф.
![]() может быть записана как к.ф. через
может быть записана как к.ф. через
![]() ,
но с другими коэффициентами.
,
но с другими коэффициентами.
![]() =
xTAx
х=Lx’ (L-матрица
перехода)
=
xTAx
х=Lx’ (L-матрица
перехода)
![]() =(Lx’)TA(Lx’)=(x’)TLTALx’=(x’)TBx’
=(Lx’)TA(Lx’)=(x’)TLTALx’=(x’)TBx’
12. Преобразование квадратичной формы к каноническому виду.
Если матрица квадратичной формы диагональна, то к.ф. имеет канонический вид.
Пусть f(х) - к.ф. в пространстве
![]() ,
тогда можно найти ортонормированный
базис, в котором эта к.ф. записывается
диагональной матрицей.
,
тогда можно найти ортонормированный
базис, в котором эта к.ф. записывается
диагональной матрицей.
![]()
Доказательство: пусть
![]() -
ортонормированный базис из собственных
векторов матрицы квадратичной формы
А.
-
ортонормированный базис из собственных
векторов матрицы квадратичной формы
А.
![]() <Аx,x>=<A
<Аx,x>=<A![]() ,
,![]() >=<
>=<![]() ,
,![]() >=<
>=<![]() ,
,![]() >=
>=![]() +
+![]() =
=![]()
Приведение квадратичной формы второго порядка к каноническому виду:
![]() =
=![]() в
в
![]()
1) составим матрицу А: А=
2) находим корни характеристического уравнения:
 =0
λ1,λ2 - корни
3) Находим
собственные вектора, соответствующие
числам λ1 и λ2.
=0
λ1,λ2 - корни
3) Находим
собственные вектора, соответствующие
числам λ1 и λ2.
![]() ,
,
![]()
Из них выбираем два вектора, ортогональные
между собой и единичн.
![]() и
и
![]() - базисные вектора.
- базисные вектора.
4) Составим матрицу перехода:
![]() ={e1,m1},
={e1,m1},
![]() ={e2,m2}
S(матрица перехода)=
={e2,m2}
S(матрица перехода)=
detS>0 (для сохранения взаимного ориент. новых векторов)
5) Переход к новому базису
![]() =
=
![]() =
=![]()
Направление собственных векторов при образовании x’=Ax называют главным направлением квадратичной формы.