

Лекции Хуторецкий
.pdfА.Б. Хуторецкий
Методы исследования в менеджменте Конспект лекций
(направление обучения «Менеджмент», магистратура)
Новосибирск, 2012
1
Оглавление |
|
Сокращения и обозначения ..................................................................................................... |
3 |
1. Введение в предмет (2 ч.) .................................................................................................... |
6 |
1.1. Основные понятия ......................................................................................................... |
6 |
1.2. Исследования в менеджменте и модели систем управления .................................... |
6 |
1.3. О содержании курса ...................................................................................................... |
8 |
1.4. Задачи математического программирования.............................................................. |
9 |
Литература........................................................................................................................... |
11 |
2. Линейное программирование (8 ч.) .................................................................................. |
11 |
2.1. Формы записи задачи линейного программирования ............................................. |
11 |
2.2. Экономическая интерпретация задачи линейного программирования ................. |
13 |
2.3. Свойства задачи линейного программирования....................................................... |
15 |
2.3.1. Общие свойства .................................................................................................... |
15 |
2.3.2. Свойства задачи в канонической форме ............................................................ |
16 |
2.4. Двойственность в линейном программировании ..................................................... |
18 |
2.4.1. Экономическая мотивация построения двойственной задачи ......................... |
18 |
2.4.2. Математическая мотивация построения двойственной задачи ....................... |
19 |
2.4.3. Построение двойственной задачи в общем случае ........................................... |
20 |
2.4.4. Основные теоремы ............................................................................................... |
22 |
2.4.5. Интерпретации...................................................................................................... |
24 |
2.5. Устойчивость задач линейного программирования................................................. |
26 |
2.5.1. Устойчивость для задачи в стандартной форме ................................................ |
26 |
2.5.2. Каноническая форма: устойчивость оптимального базиса .............................. |
28 |
2.5.3. Каноническая форма: устойчивость оптимального решения .......................... |
32 |
2.5.4. Каноническая форма: устойчивость теневых цен ............................................. |
35 |
Литература........................................................................................................................... |
37 |
3. Задачи транспортного типа................................................................................................ |
38 |
3.1. Предварительные сведения ........................................................................................ |
38 |
3.1.1. Графы и сети ......................................................................................................... |
38 |
3.1.2. Вполне унимодулярные задачи ........................................................................... |
39 |
3.2. Транспортная задача в матричной постановке ......................................................... |
40 |
3.2.1. Основная модель................................................................................................... |
40 |
3.2.2. Несбалансированные задачи ............................................................................... |
43 |
3.2.3. Двойственная задача ............................................................................................ |
44 |
3.3. Задача о назначениях................................................................................................... |
46 |
3.3.1. Основная модель................................................................................................... |
46 |
3.3.2. Варианты постановки задачи .............................................................................. |
47 |
3.4. Транспортная задача в сетевой постановке .............................................................. |
48 |
3.4.1. Основная модель................................................................................................... |
48 |
3.4.2. Несбалансированные и несовместные задачи ................................................... |
52 |
3.4.3. Двойственная задача ............................................................................................ |
53 |
3.5. Модель производства с запасами ............................................................................... |
54 |
Литература........................................................................................................................... |
57 |
4. Элементы теории игр ......................................................................................................... |
57 |
4.1. Основные понятия ....................................................................................................... |
57 |
4.2. Равновесие в доминирующих стратегиях ................................................................. |
58 |
4.3. Равновесия по Нэшу .................................................................................................... |
61 |
4.3.1. Определение и основные результаты ................................................................. |
61 |
4.3.2. Исключение сильно доминируемых стратегий ................................................. |
62 |
4.4. Равновесия в смешанных стратегиях......................................................................... |
64 |
4.5. Антагонистические игры ............................................................................................ |
66 |
4.6. Матричные игры .......................................................................................................... |
68 |
Литература........................................................................................................................... |
71 |
2

Сокращения и обозначения
БДР ― базисное допустимое решение.
ЗЛП ― задача линейного программирования.
ИСДС ― исключение сильно доминируемых стратегий.
ЛПР ― лицо, принимающее решения.
ОПДО ― область постоянства двойственных оценок.
ОПОР ― область постоянства оптимального решения.
ТЗМП ― транспортная задача в матричной постановке.
ТЗСП ― транспортная задача в сетевой постановке.
ЦФ ― целевая функция.
a A ― a есть элемент множества A, a принадлежит A.
{a1, …, an, …} ― множество, состоящее из элементов, указанных в фигурных скобках.
{a A | P(a)} ― множество всех элементов множества A, удовлетворяющих условию
P(a).
f : A → B ― точечно-множественное отображение, сопоставляющее каждому элементу a множества A некоторое (возможно, пустое) подмножество f(a) множества B.
S(a, s0) ― множество реализуемых состояний объекта управления, в которые его можно перевести из исходного состояния s0 при состоянии a внешней среды.
X(a) ― множество допустимых решений в состоянии a внешней среды.
X*(a, s0) ― множество оптимальных решений в состоянии a внешней среды, если объ-
ект управления находится в состоянии s0.
A B ― декартово произведение множеств A и B.
A2 = A A ― декартов квадрат множества A.
A + B ― прямая сумма (сумма по Минковскому) множеств A и B. (a1, …, an) ― упорядоченный набор объектов произвольной природы.
m, n = {m, … ,n}, если m ≤ n; если m > n, то m, n = ; здесь m и n ― целые числа.
R ― множество всех действительных чисел.
Rn ― евклидово пространство размерности n, R1 = R.
[a, b], где a и b принадлежат Rn ― отрезок в Rn с концами a и b.
(a, b) = [a, b] \ {a, b} ― множество внутренних точек отрезка [a, b]. 0n — нуль-вектор в Rn.
― множество всех матриц размерности m п с элементами из R.
[A]j ― строка с номером i и столбец с номером j, соответственно, матрицы A. 3
AT ― результат транспонирования матрицы A. det(A) ― определитель квадратной матрицы A.
A–1 ― обратная матрица для квадратной матрицы A.
f(x) → max при условии x X ― запись задачи оптимизации: найти хотя бы один эле-
мент x X такой, что f(x) ≥ f(x') для всех x'X. Здесь X ― произвольное, вообще говоря, мно-
жество допустимых решений. Предполагается, что функция f определена на X. Argmax{f(x) | x X} ― множество всех точек максимума функции f(x) на множестве X.
P* ― задача, двойственная для задачи линейного программирования P.
P(A, b, c) ― возмущенная задача линейного программирования.
A0, b0, c0 ― исходные значения параметров задачи P(A, b, c). x(A, b, c) ― оптимальное решение задачи P(A, b, c).
y(A, b, c) ― оптимальное решение двойственной задачи P*(A, b, c).
N(β) ― базисное множество для базиса β.
xб(β) базисная часть вектора x относительно базиса β. xн(β) ― небазисная часть вектора x относительно базиса β.
B(β) ― базисная матрица для базиса β.
B–1(β) ― обратная базисная матрица для базиса β.
x(β) ― базисное допустимое решение ЗЛП в канонической форме, порожденное допус-
тимым базисом β.
Uc ― область постоянства оптимального решения для ЗЛП в канонической форме.
Если с0j = cj для всех j s, то Uc(j) ― множество всех значений cs, при которых базис β,
допустимый и оптимальный в задаче P(A0, b0, c0), остается таковым в задаче P(A0, b0, c). Ub ― область постоянства двойственных оценок для ЗЛП в канонической форме.
Если bi0 = bi для всех i r, то Ub(r) ― множество всех значений br, при которых базис
β, допустимый и оптимальный в задаче P(A0, b0, c0), остается таковым в задаче P(A0, b, c0).
G = (I, (Xi | i I), (ui | i I)) статическая игра с полной информацией в нормальной форме;
I ― множество игроков, Xi ― множество всех стратегий игрока i, ui(x) ― функция выигры-
ша игрока i, определенная на множестве X = X1 X2 … Xm всех исходов игры.
X–i = X1 … Xi–1 Xi+1 … Xm.
x–i = (x1, …, xi–1, xi+1, …, xm) X–i для x = (x1, …, xm) X ― набор стратегий всех игроков, кроме игрока i.
x = (xi; x–i) ― исход статической игры, представленный в виде пары, состоящей из стра-
тегии xi игрока i и набора x–i стратегий всех других игроков.
Ri(x–i) ― отображение отклика игрока i, определенное на X–i.
4

GM ― смешанное расширение игры G.
μi = (pik | k 1, n(i) ) ― смешанная стратегия игрока i, имеющего n(i) чистых стратегий. eik ― вырожденная смешанная стратегия игрока i, соответствующая его чистой страте-
гии с номером k.
G = (X, Y, F(x, y))
G = (A, B) ― биматричная игра.
G = (A) ― матричная игра.
5
1. Введение в предмет (2 ч.)
1.1. Основные понятия
Менеджер (руководитель, управляющий, организатор, администратор), принимает ре-
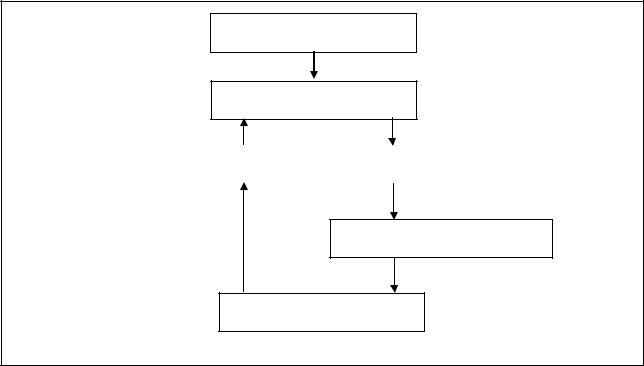
шения, осуществляет их и отвечает за результаты. Следовательно, он ― лицо, принимающее решения (ЛПР), или оперирующая сторона. Менеджер является элементом управляющей системы, которая в совокупности с объектом управления образует систему управления (см.
рис. 1).
Состояние внешней среды
Объект управления
Управляющие воздействия |
|
Состояние объекта управления |
|
|
|
Степень достижения цели
Управляющая система
Система управления
Рисунок 1. Структура системы управления
В каждый момент объект управления находится в некотором состоянии. Цель управле-
ния определяет множество желательных состояний объекта. Мы предполагаем, что управ-
ляющая система способна идентифицировать текущее состояние объекта управления. Если оно не принадлежит множеству желательных состояний, то ЛПР выбирает управляющее воз-
действие (управление), чтобы перевести объект в желательное состояние. Такое управление будем называть целесообразным. Выбор целесообразного управления есть решение менед-
жера. Результат управляющего воздействия и множество желательных состояний зависят от
состояния внешней среды.
1.2. Исследования в менеджменте и модели систем управления
Объектом исследования в менеджменте является система управления. Предмет иссле-
дования, как правило, ― взаимосвязь между состоянием внешней среды, управляющим воз-
6
действием и состоянием объекта управления. Цель исследования ― выявление и решение управленческой (связанной с системой управления) проблемы. Метод исследования ― по-
строение математической модели системы управления, анализ этой модели и выбор с ее помощью целесообразного управления.
Ниже перечислены структурные элементы модели, которые должны быть описаны в процессе ее разработки.
1.Множество A возможных (ожидаемых) состояний внешней среды.
2.Для каждого a A ― множество допустимых решений X(a). Это множество управле-
ний, возможных (доступных, реализуемых) при состоянии a внешней среды.
3.Исходное состояние s0 объекта управления.
4.Функция реализации, сопоставляющая каждой тройке (a, x, s0), где a A и x X(a), со-
стояние s = (a, x, s0), в которое переходит объект управления из исходного состояния,
если в состоянии a внешней среды применить управление x.
5.Для каждого возможного состояния внешней среды a A ― множество S*(a) желатель-
ных состояний объекта управления.
Подробность описаний указанных элементов модели зависит от ситуации и цели исследова-
ния.
С помощью функции реализации можно описать множество S(a, s0) реализуемых со-
стояний объекта управления, в которые его можно перевести из исходного состояния s0 при состоянии a внешней среды: S(a, s0) = { (a, x, s0) | x X(a)}.
Для описания множества желательных состояний часто используют оценочную функ-
цию, которая для всех пар (a, s) таких, что a A и s S(a, s0), указывает, в какой степени дос-
тигается цель, если при состоянии a внешней среды объект управления переходит в состоя-
ние s. Желательными состояниями являются те, в которых оценочная функция достигает максимума или минимума (в зависимости от формулировки цели). Пусть h(a, s) ― оценочная функция. Будем для определенности считать, что ее рост соответствует приближению к це-
ли. Тогда
S*(a) = {s S(a, s0) | s'S(a, s0) (h(a, s) ≥ h(a, s'))}.
Подставляя функцию реализации вместо второго аргумента оценочной функции, получим
целевую функцию (ЦФ) F(a, x, s0) = h(a, (a, x, s0)), которая указывает степень достижения цели в результате применения управления x к объекту, находящемуся в состоянии s0, при со-
стоянии a внешней среды. Целевая функция в сочетании с направлением оптимизации опре-
деляет критерий оптимальности.
Имея критерий оптимальности, можем описать целесообразные решения как опти-
мальные. Пусть X*(a, s0) ― множество оптимальных решений в состоянии a внешней среды,
7

если объект управления находится в состоянии s0. Для максимизируемой целевой функции
X*(a, s0) ={x X(a) | (a, x, s0) S*(a)} = {x X(a) | x'X(a) (F(a, x, s0) ≥ F(a, x', s0))}
Исследование состоит, как правило, из следующих этапов:
1.Анализ системы управления и выявление проблемы.
2.Содержательное описание (постановка) проблемы.
3.Построение отражающей проблему модели системы управления.
4.Анализ модели и выбор целесообразного (переводящего систему в желательное со-
стояние) управления.
5.Разработка и обоснование рекомендаций для ЛПР.
1.3. О содержании курса
Курс объединяет сведения из исследования операций (operations research, OR), науки о методах управления (management science, MS), теории принятия решений (decision theory),
системного анализа (system analysis). Все указанные дисциплины включают разделы, связан-
ные с математическими моделями систем управления. Приведенные ниже авторитетные мнения свидетельствуют о взаимосвязях между этими дисциплинами.
«Operations research и management science включают использование математического моделирования и статистических методов для анализа сложных бизнес-процессов и приня-
тия хороших решений».(1) Исследование операций ― это «применение … математических подходов к принятию деловых решений; другое название ― management science».(2) «В со-
временном словоупотреблении термины operations research, management science, system analysis можно считать почти синонимами».(3) «Математическими расчетами, облегчающими принятие целесообразных решений, занимается теория математических моделей и методов принятия оптимальных решений, или, другими словами, исследование операций».(4)
Мы будем изучать методы построения и анализа математических моделей систем управления. Такие модели формулируют на языке математики и анализируют средствами математики. В математической модели состояние внешней среды описывается набором не-
управляемых входных показателей, управляющее воздействие ― совокупностью переменных
модели (управляемых входных показателей), состояние объекта управления ― множеством
выходных показателей. Наша задача ― освоить базовые, широко применяемые и хорошо ис-
следованные классы моделей, соответствующие основным типам ситуаций выбора.
(1)Crowder H.P. The Science of Smart Decisions // OR/MS Today, 2000. V. 27. No. 3.
(2)Operations research // Imber J., Toffler B.-A. Dictionary of marketing terms. 4th edition. N.Y.: Hauppauge, 2008 (Barron's Educational Series).
(3)Lesso W.G. Operations research // McGraw-Hill Concise Encyclopedia of Science and Technology. New York: McGraw-Hill, 2002.
(4)Гимади Э.Х., Глебов Н.И. Математические модели и методы принятия решений. Новосибирск, НГУ,
2008.
8
Типы ситуаций выбора различаются степенью доступности для ЛПР в момент приня-
тия решения информации о состоянии внешней среды в период реализации этого решения.
Пусть A0 A ― множество состояний, в которых может находиться внешняя среда в период реализации решения.
Если A0 = {a0}, состояние внешней среды можно считать известным, то имеем ситуа-
цию выбора в условиях определенности (детерминированная ситуация).
Если множество A0 не одноэлементное и на нем задано распределение вероятностей
(например, одна из характеристик внешней среды является случайной величиной), то выбор происходит в условиях риска (стохастическая, или вероятностная, неопределенность).
Если множество A0 не одноэлементное, но распределение вероятностей на нем неиз-
вестно, то возникает ситуация природной (интервальной) неопределенности.
Выбор решения происходит в условиях субъективной (игровой) неопределенности, ес-
ли на состояние внешней среды влияют какие-то целеустремленные агенты (ЛПР, пресле-
дующие собственные цели).
Особого внимания требует формализация «смешанных» ситуаций, в которых доступ-
ность информации о некоторых характеристиках внешней среды соответствует различным типам неопределенности. В недетерминированной ситуации состояние объекта управления следует описывать так, чтобы функция реализации не зависела от неопределенных парамет-
ров внешней среды. Для этого обычно используют усреднение по случайным параметрам внешней среды (ожидаемый результат) и минимизацию полезного эффекта по неопределен-
ным параметрам (гарантированный результат).
1.4. Задачи математического программирования
Пусть S и A ― множества возможных состояний некоторого экономического объекта и его внешней среды соответственно.
Предположение 1. Объект управляем, то есть ЛПР может выбором решения влиять на поведение и состояние объекта.
Предположение 2. Известна функция реализации, s = (a, x, s0), сопоставляющая каж-
дой тройке (a, x, s0), где a A, x X(a) и s0 S, состояние, в которое переходит объект из ис-
ходного состояния s0, если в состоянии a внешней среды применить к нему управление x.
Предположение 3. ЛПР имеет цель, которая для каждого возможного состояния внеш-
ней среды a A указывает множество S*(a) желательных состояний объекта управления.
Предположение 4. Выбор решения происходит в условиях определенности, то есть со-
стояние a0 внешней среды в период реализации решения известно оперирующей стороне.
9

Фиксированные аргументы a0 и s0 можно исключить, поэтому положим X = X(a0),
S* = S*(a0), (x) = (a0, x, s0). |
|
Теперь можем сформулировать задачу выбора решения: |
|
выбрать такое решение x X, для которого (x) S*. |
(1) |
Предположение 5. Известна оценочная функция, h(s), которая указывает, в какой сте-
пени достигается цель ЛПР, если объект находится в состоянии s.
Предположение 6. Функция h(s) возрастает по мере приближения к цели.
Тогда желательными являются те состояния, в которых оценочная функция достигает максимума. Целевая функция принимает вид f(x) = h( (x)), определена на X и указывает сте-
пень достижения цели в результате решения x.
При сделанных предположениях задача (1) является задачей оптимизации: найти оп-
тимальное решение, то есть элемент x X, максимизирующий функцию f(x), |
|
f(x) → max при условии x X. |
(2) |
Обозначение. Rn ― арифметическое пространство размерности n, множество всех век-
торов-столбцов вида x = (x1, …, xn)T, где xi R для всех i.
Предположение 7. Решения описаны как числовые векторы, то есть конечные наборы значений числовых показателей, управляемых входных параметров: x Rn.
При этом предположении задача (2) является задачей математического программиро-
вания: |
|
f(x) → max при условии x X Rn. |
(3) |
Предположение 8. Множество допустимых решений X есть множество всех решений
конечной системы ограничений: уравнений и/или нестрогих неравенств.
Задача (3), дополненная предположением 8, становится задачей нелинейного програм-
мирования.
Обозначение. Для целых чисел m и n положим m, n = {m, …, n}, если m ≤ n, и m, n =
, если m > n. |
|
||||
Задачу математического программирования можно записать следующим образом: |
|
||||
f(x) → max при условии x Rn, |
(4) |
||||
|
|
|
|
|
(5) |
gi(x) ≤ bi для i 1, m1 , |
|||||
|
|
|
(6) |
||
gi(x) = bi для i m1 1, m . |
|||||
10