

2. Кинематика
2.1 План скоростей.
Планом скоростей (ускорений) механизма называют чертеж, на котором изображенные в виде направленных отрезков векторы, которые в масштабе определяют модуль и направление скоростей (ускорений) разных точек звеньев для данного положения механизма. План скоростей (ускорений) механизма является совокупностью планов скоростей (ускорений) отдельных звеньев, которые построены из одного полюса, общего для всех звеньев.
Кинематический анализ механизма проводится в таком порядке:
– сначала определяются кинематические параметры начального звена;
– дальше выполняется кинематическое исследование отдельных структурных групп Ассура в последовательности их присоединения к начальному звену при образовании механизма. При этом, каждое звено механизма рассматривается как таковая, что осуществляет плоское движение; необходимо определить скорость и ускорение по меньшей мере двух ее точек. Этими точками являются центры шарниров вращательных пар и одноименные точки элементов поступательных кинематических пар. Как сказано, построение планов выполняется по структурным группам в порядке их присоединения, начиная с начального звена. В этом случае в каждой группе Ассура будут известные скорости и ускорения внешних кинематических пар, которыми присоединяется данная группа. Исследование каждой группы должно начинаться с определения кинематических параметров внутренней пары, которая является общей для звеньев, которые образуют эту пару. Потом, при потребности, определяются кинематические параметры других характерных точек группы и угловые скорости и ускорения звеньев.
Пусть известны
скорости нескольких точек плоского
сечения тела (рис.9). Если эти скорости
отложить в масштабе из некоторой точки
О и соединить их концы прямыми,
то получится картинка, которая
называется планом скоростей. (На рисунке
![]() ).
).

Рис.4
Свойства плана скоростей.
а) Стороны треугольников на плане скоростей перпендикулярны соответствующим прямым на плоскости тела.
Действительно,
![]() .
Но на плане скоростей
.
Но на плане скоростей
![]() .
Значит
.
Значит
![]() причём
причём
![]() перпендикулярна АВ, поэтому и
перпендикулярна АВ, поэтому и
![]() .
Точно так же
.
Точно так же
![]() и
и
![]() .
.
б) Стороны плана скоростей пропорциональны соответствующим отрезкам прямых на плоскости тела.
Так как
![]() ,
то отсюда и следует, что стороны плана
скоростей пропорциональны отрезкам
прямых на плоскости тела.
,
то отсюда и следует, что стороны плана
скоростей пропорциональны отрезкам
прямых на плоскости тела.
Объединив оба свойства, можно сделать вывод, что план скоростей подобен соответствующей фигуре на теле и повёрнут относительно её на 90˚ по направлению вращения. Эти свойства плана скоростей позволяют определять скорости точек тела графическим способом.
2.2 Мгновенный центр скоростей (мцс). Примеры определения мцс.
Теорема Эйлера-Шаля доказывает, что любое непоступательное перемещение фигуры в плоскости можно осуществить поворотом вокруг некоторого неподвижного центра. В соответствии с этим легко доказывается, что при плоскопараллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нолю. Эту точку называют мгновенным центром скоростей (МЦС). В учебниках эту точку пишут с индексом V, например PV, CV.
При определении положения МЦС скорость любой точки может быть записана: VM=VCV+VMCV , где точка СV выбрана за полюс. Поскольку это МЦС и VCV=0 , то скорость любой точки определяется как скорость вращении вокруг мгновенного центра скоростей.

Из рис. 5 видно, что
мгновенный центр скоростей лежит в
точке пересечения перпендикуляров,
проведенных к скоростям точек, при этом
всегда справедливо соотношение

Рис. 5
На нижеприведенных рисунках показаны примеры определения положения мгновенного центра скоростей и приведены формулы для расчета скоростей точек.

Рис.6
Для рисунка 6:
СV совпадает с точкой В VB=0. Шатун АВ вращается вокруг точки В

2.

3. МЦС лежит в «бесконечности»

4.


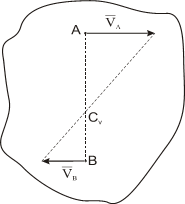
Рис.7


Рис.8
здесь VB II VA
В этом случае МЦС находится в “бесконечности”, т.е.


Рис.9

Формулы справедливы при отсутствии проскальзывания в точке СV.


Рис.10
