

Содержание
Теоретическая часть курсовой работы
-
Статика.
-
Типы связей и реакций связей.
-
Принцип освобождаемости от связей.
-
Пара сил. Момент силы относительно точки.
-
Теорема Пуансо.
-
Теорема Вариньона.
-
-
Кинематика.
-
План скоростей.
-
Мгновенный центр скоростей (МЦС). Примеры определения МЦС.
-
Поступательное движение твердого тела (скорость и ускорение точки).
-
Вращательное движение твердого тела (скорость и ускорение точки).
-
Передаточные механизмы.
-
-
Динамика.
-
Сила инерции материальной точки.
-
Принцип Даламбера.
-
Приведение сил инерции точек твердого тела к простейшему виду.
-
Практическая часть курсовой работы
-
Статика
Задача 1
Задача 2
Задача 3
-
Кинематика
Задача 1
Задача 2
-
Динамика
Задача 1
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
1. Статика
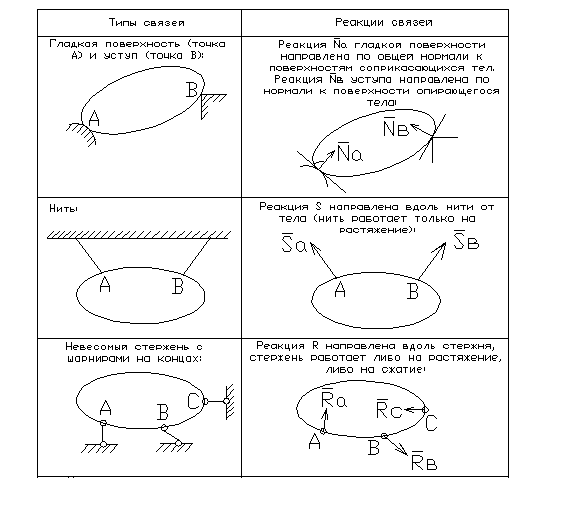
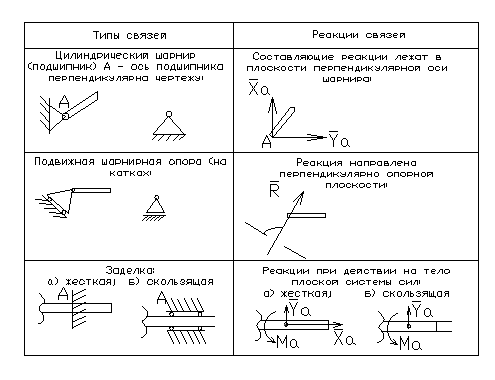
1.1Типы связей и реакций связей.
1.2 Принцип освобождаемости от связей.
Принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие реакциями. В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного под действием активных (заданных) сил и реакций связей.
Приведенная аксиома дает возможность применить к несвободному телу условия равновесия, справедливые для свободного тела. Для этого следует мысленно отбросить связи, наложенные на тело, заменив их действие соответствующими силами, равными реакциям связей. Затем нужно рассмотреть равновесие несвободного тела как тела свободного, находящегося под действием активных сил и реакций, связей.
Определение модулей и направлений реакций связей имеет первостепенное практическое значение, так как согласно четвертой аксиоме, зная реакции, будем знать и силы давления на связи. А это, в свою очередь, позволит, пользуясь законами сопротивления материалов, рассчитать прочность конструкций или сооружений.
При решении некоторых задач о равновесии тела можно сразу указать направление реакций связей, поэтому остается определить модули реакций связей.
Во многих задачах статики для их упрощения условно пренебрегают силами трения между связью и телом. Связь в таких случаях считают идеально гладкой в отличие от реальной связи, в которой учитывается влияние сил трения.
Таким образом, различают связи без трения (идеальные) и связи с трением (реальные).
1.3 Пара сил. Момент силы относительно точки.
Парой сил называются две параллельные силы, равные по модулю и противоположно направленные.
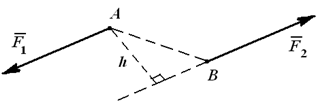
Рис.1
Свойства пары сил:
-
Пара сил не имеет равнодействующую, т.к. силы расположены на параллельных прямых.
-
Действие пары сил на тело не изменяется, если её перенести на какое-либо другое место на плоскости.
-
Две пары оказывают одинаковое действие на тело, если их моменты эквивалентны.
-
Проекции пары сил на две взаимоперпендикулярные плоскости равны.
Момент силы относительно точки - это вектор, модуль которого равен произведению модуля силы на плечо - кратчайшее расстояние от точки до линии действия силы. Момент создает вращение. Направление вектора момента силы перпендикулярно плоскости, проходящей через точку и линию действия силы, так, что глядя по направлению вектора момента, вращение, совершаемое силой вокруг точки, происходит по часовой стрелке. Момент силы относительно точки положителен, если сила поворачивает плечо против часовой стрелки.
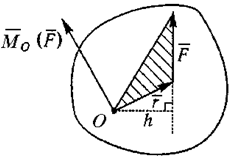
Рис.2
Плечом называется расстояние между линией действия силы и точкой, взятой по перпендикуляру.
1.4 Теорема Пуансо.
Основная теорема статики (теорема Пуансо) - произвольная система сил, приложенная к твердому телу, эквивалентна одной силе, приложенной в центре приведения и равной главному вектору, и одной паре сил, момент которой равен главному моменту относительно центра приведения:

Главным моментом системы сил относительно центра называют вектор, равный сумме моментов всех сил системы относительно центра.
Главным вектором системы сил называют вектор, равный сумме всех сил системы
Доказательство теоремы: Пусть к твердому телу приложена произвольная система сил (F1, F2, ..., Fn). Какую либо точку тела выберем за центр приведения и обозначим буквой O. Силы системы переносим в эту точку и получаем систему пар сил и пучок сил в центре приведения. Складывая все силы пучка и пары сил, получаем одну силу в центре приведения и одну пару сил. Силы пучка по величине и направлению равны силам исходной системы, поэтому полученная сила равна главному вектору системы R. Моменты пар равны моментам соответствующих сил относительно центра O, поэтому момент полученной пары сил (F,F') равен главному моменту системы MO. Теорема доказана.
1.5 Теорема Вариньона.
Теорема о моменте равнодействующей (теорема Вариньона) - если система сил приводится к равнодействующей, то момент равнодействующей относительно любого центра равен сумме моментов всех сил системы относительного того же центра.
Доказательство теоремы:
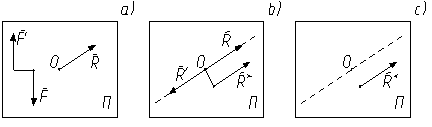
Рис.3
Отметим, что к равнодействующей приводятся система сходящихся сил и система параллельных сил, для которых главный момент равен нулю.
В общем случае к равнодействующей, не проходящей через центр приведения, приводится система сил, у которой главный вектор и главный момент взаимно ортогональны. Чтобы это показать, представим главный момент MO в виде пары (F,F'), лежащей в одной плоскости с главным вектором R (рис. 3 а). Пользуясь свойствами пары, трансформируем ее в пару (R*,R') , а затем повернем ее так, чтобы сила R' уравновесила главный вектор (рис. 3 b). Тогда останется одна сила R*, равная главному вектору по величине и направлению, но не проходящая через точку O (рис. 3 c). Момент равнодействующей относительно центра O равен моменту исходной пары, а он равен главному моменту или сумме моментов всех сил системы:

За центр приведения может быть выбрана любая точка тела, и поэтому выражения справедливы для любого центра, когда система сил приводится к равнодействующей. Так доказана теорема Вариньона в самом общем виде.
Выражения являются векторными для пространственной системы сил и алгебраическими для плоской системы сил, когда
где A - любая точка плоскости, где лежат силы.
Теорема Вариньона может быть распространена и на моменты относительно осей, например, для оси OZ, так как момент силы относительно оси равен проекции на эту ось момента относительно центра на оси:
Итак, произвольная система сил приводится к одной силе и паре сил, причем сила является статическим инвариантом системы сил. Эту же систему сил можно привести к динамическому винту, в котором сила и момент пары будут статическими инвариантами. Кроме того, произвольная система сил может быть представлена в простейшем виде, как две силы, не лежащие в одной плоскости.
В частных случаях, когда система сил приводиться к одной силе или равнодействующей, выполняется теорема Вариньона о моменте равнодействующей, справедливая для векторов-моментов, алгебраических моментов и моментов силы относительно оси.