

11-12. Электромех и мех хар-ки системы эп «нув-дпт» в рнт
Электро-механической
характеристикой системы ЭП наз.
зависимость
 при пост. значении угла α.
при пост. значении угла α.
 ;
; ;E-nΔUT-Eя=RяцIяц
;E-nΔUT-Eя=RяцIяц
E0cosα-Eя=
RяцIяц
; при nΔUT=0
Ея=Се·ωср
; Се=КФω;
 ;
ωср=ω0-Δω;
;
ωср=ω0-Δω;
 ;
;
 ;
Из уравнений видно изменяя угол открывания
α регулируем угловую скорость ХХ
двигателя. Из электро-механической
характеристики получим механическую:
М=кФ·Iя.ср=Се·Iя.ср;
;
Из уравнений видно изменяя угол открывания
α регулируем угловую скорость ХХ
двигателя. Из электро-механической
характеристики получим механическую:
М=кФ·Iя.ср=Се·Iя.ср;
 ;
Т.к. в системе ЭП НУВ-ДПТ сущ. РПТ, то для
ЭМ и М хар-ки будут представляться
выражениями, отличных от рассмотренных.
;
Т.к. в системе ЭП НУВ-ДПТ сущ. РПТ, то для
ЭМ и М хар-ки будут представляться
выражениями, отличных от рассмотренных.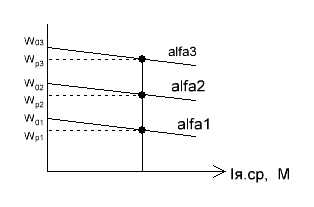
 ;
М=кФ·Iя.ср=Се·Iя.ср;
;
М=кФ·Iя.ср=Се·Iя.ср; RФ(IЯ.СР)
– фиктивное R выпрямителя, учитывающая
преривистый режим работы в системе. Это
R зависит от угла откр. α, пар-ров ЯЦ,
интервала проводимости λ
RФ(IЯ.СР)
– фиктивное R выпрямителя, учитывающая
преривистый режим работы в системе. Это
R зависит от угла откр. α, пар-ров ЯЦ,
интервала проводимости λ
 или
или

 -
для 1ФазМВ
-
для 1ФазМВ  - 3Фаз МВ
- 3Фаз МВ
 для
3фаз МВ с трансф-ным питанием
для
3фаз МВ с трансф-ным питанием
 для 3фаз НВ
для 3фаз НВ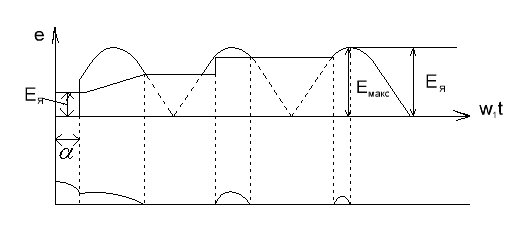
Из ф-л видно, что скорость ХХ не опр-тся углом открывания α как РНТ. Для РПТ отсутствует управляющее воздействие в виде угла α По цепи якоря будет протекать динамическая сост. тока, которая обеспеч-ет разгон дв. (или торм-е). В данном случае полож-ый ток дв.создает М дв., что приводит к увелич-ю скорости и Е якоря. При протекании данного тока и увел-я скорости будет продолжаться, пока Е якоря не станет =ЕМАКС. Ток прекратится, а скорость достигнет макс возможной.
Таким образом при углах α<π/m’ скорость ХХ не зависит от угла откр-я α. При углах α>π/m’ опр-тся углом α и мгнвенным зная-ем ЭДС, соотв. этому углу
 !
из графиков видно, что ЭМ и М ! хар-ки в
зоне РПТ имеют нелин
!
из графиков видно, что ЭМ и М ! хар-ки в
зоне РПТ имеют нелин
ω01…ω03 – скорость ! хар-р,что обусловлено нелин-тью RФ ХХ для РНТ
Для
упрощенного построения части хар-ки
необходимо:
Построить требуемые хар-ки для заданных углов α для РНТ
Опред-ть значение гранично-непрерывного тока и соотв-щие этому току моменты для заданнных углов α
3). Соединить полученные точки прямой (?) линией с точками ωмакс
13. Режимы работы системы эп унв-дпт
Т.к. в системе ЭП НУВ-ДПТ сущ. РПТ, то для ЭМ и М хар-ки будут представляться выражениями.
 ;
М=кФ·Iя.ср=Се·Iя.ср;
;
М=кФ·Iя.ср=Се·Iя.ср;
 ;
;
RФ(IЯ.СР) – фиктивное R выпрямителя, учитывающая преривистый режим работы в системе. Это R зависит от угла откр. α, пар-ров ЯЦ, интервала проводимости λ
 или
или

 -
для 1ФазМВ
-
для 1ФазМВ  - 3Фаз МВ
- 3Фаз МВ
 для
3фаз МВ с трансф-ным питанием
для
3фаз МВ с трансф-ным питанием
 для 3фаз НВ. Из выражений характеристик
для РПТ следует, что скорость ХХ двигателя
неоднозначно зависит от отстования
угла альфа, и будет выше, чем скорость
ХХ в РНТ при том же угле альфа в следствии
неоднозначности зависимоти скорости
в РПТ системаЭП в РПТ теряет свою
управляемость, в том смысле, что скорость
двигателя не зависит от альфа, а в
различных степенях определяется
нагрузкой двигателя. Следовательно ЭП
УНВ-ДПТ может функционировать лишь с
обратной связью по скорости либо с обр
связью по параметру адекватности
скорости
для 3фаз НВ. Из выражений характеристик
для РПТ следует, что скорость ХХ двигателя
неоднозначно зависит от отстования
угла альфа, и будет выше, чем скорость
ХХ в РНТ при том же угле альфа в следствии
неоднозначности зависимоти скорости
в РПТ системаЭП в РПТ теряет свою
управляемость, в том смысле, что скорость
двигателя не зависит от альфа, а в
различных степенях определяется
нагрузкой двигателя. Следовательно ЭП
УНВ-ДПТ может функционировать лишь с
обратной связью по скорости либо с обр
связью по параметру адекватности
скорости
Так как выпрямитель не реверсивный, то обеспечивается лишь двигательный режим работы, если момент механизма несет реактивный характер.
Двигатель работы обеспечивается только в первом квадранте
Если момент двигателя носит активный характер, то система ЭП может также обеспечивать режим торможения двигателя противовключением при альфа=90, а так же режим рекуперативного движения с отдачей энергии в сеть через выпрямитель при альфа меньшем 90.
В данной системе ЭП невозможно изменить направление протекания тока в цепи якоря из-за однонаправленного действия теристоров .
В данной системе при реактивном действии осуществляется определенные виды работ:
-управляющий пуск двигателя на требуемой скорости
-регулировка скорости двигателя
Без переключения в схеме нельзя обеспечить электрическое торможение, торможение механизма возможно лишь за счет тормозящего действия момента сопростивления