

6-1-воротников
.pdfПонятие о числе Маха: M=1
Локационные системы роботов |
Модуляция сигналов |
Понятие о числе Маха: M=1,5
Локационные системы роботов |
Модуляция сигналов |

Формирование ударной волны, M ≈ 0,8
Локационные системы роботов |
Модуляция сигналов |
6. Датчики акустической локации
Общие сведения
В робототехнике акустический локатор (дальномер) входил в состав первой мультимодальной информационной системы «глаз––ухо––рука» созданной в рамках проекта «Stanford Arm» в 70-х годах прошлого века.
Классификация акустических датчиков
по назначению |
по принципу действия |
|
||||||||
|
|
|
передатчики (рис. 47) |
|
|
|
генераторные |
|||
|
|
|
приемники |
|
|
|
параметрические |
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
обратимые преобразователи |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
громкоговорители |
|
|
|
|
|
|
|
|
|
|
микрофоны |
|
|
|
|
|
|
|
|
|
|
|
а |
б |
|
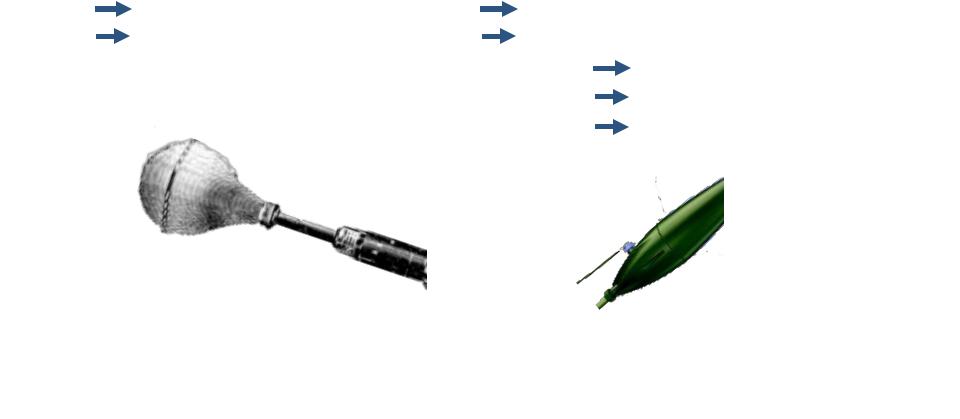
Рис. 47. Акустические передатчики: первый излучатель — свисток Гальтона (а) и всенаправленный источник звука Bruel&Kjear (б)
Локационные системы роботов |
Датчики акустической локации |
Передатчики
Эффективность излучателя зависит от соотношения между его размерами и длиной волны. Для
излучателя произвольной формы точные решения, связывающие излучаемую мощность P с
размерами излучателя отсутствуют.
При расчетах акустических передатчиков используют модели излучателей нулевого, первого, второго, … порядка.
Для идеального излучателя типа большого поршня (s > 2) можно использовать выражение:
P 0,5 сv2s.
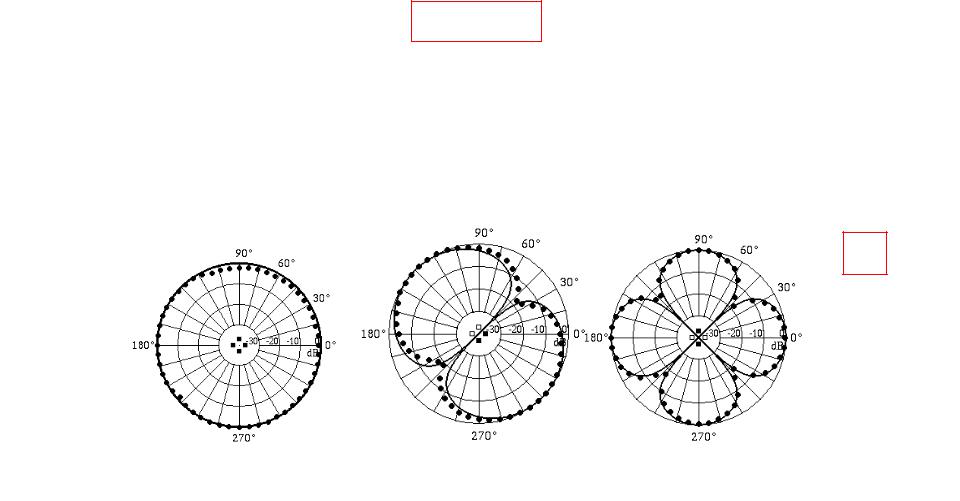
Излучатель нулевого порядка — монополь — представляет собой пульсирующую сферу радиусом r, создающую в окружающей среде сферические волны (рис. 48, а).
P ck 2V 2 /(8 ),
где k = 2 / — волновое число; V — объемная скорость излучателя, V = 4 r2 .
Акустический диполь (излучатель первого порядка) представляет собой сферу, осциллирующую около положения равновесия, а его излучение характеризуется направленностью (рис. 48, б).
!
а |
б |
в |
Рис. 48. Диаграммы направленности: монополя (а), диполя (б) и квадраполя (в)
Локационные системы роботов |
Датчики акустической локации |

Акустический монополь
Локационные системы роботов |
Датчики акустической локации |
Гармонический осциллятор (монополь)
Локационные системы роботов |
Датчики акустической локации |
Акустический диполь
Локационные системы роботов |
Датчики акустической локации |
Источник звука с диаграммой «кардиоида»
Локационные системы роботов |
Датчики акустической локации |

Конструктивные схемы излучателей
Промышленные ультразвуковые излучатели представляют собой наборную конструкцию (пакет) из диполей (рис. 49, а и 50, а, б). Соединение отдельных элементов в излучателе позволяет сформировать диаграмму направленности нужной формы.
в
б
а
Рис. 49. Промышленные ультразвуковые преобразователи: гидроакустический излучатель (а), двухдиапазонный излучатель Reson TC2116 (б), медицинский излучатель (в).
На рис. 50 представлены два гидроакустических излучателя, представляющие собой
короткие полые цилиндры (кольца).
!
Рис. 50. Схемы гидроакустических излучателей с продольным (а) и поперечным (б) пьезоэффектом (стрелками показаны направления колебаний), АЧХ излучателя (в) и зависимость ее ширины от отношений h/rср (г)
Локационные системы роботов |
Датчики акустической локации |