

6-1-воротников
.pdfЧастотные диапазоны радиосвязи
Диапазон частот |
Наименование диапазона частот |
Диапазон длин волн |
Название диапазона длин волн |
|
|
|
|
3 … 30 Гц |
Крайне низкие частоты (КНЧ, ELF) |
100 …10 Мм |
Декамегаметровые |
|
|
|
|
30 … 300 Гц |
Сверхнизкие частоты (СНЧ, SLF) |
10 …1 Мм |
Мегаметровые |
|
|
|
|
300 … 3000 Гц |
Инфранизкие частоты (ИНЧ, ULF) |
1000…100 км |
Гектокилометровые |
|
|
|
|
3…30 кГц |
Очень низкие частоты (ОНЧ, VLF) |
100 …10 км |
Мириаметровые |
|
|
|
|
30…300 кГц |
Низкие частоты (НЧ, LF) |
10…1 км |
Километровые |
|
|
|
|
300…3000 кГц |
Средние частоты (СЧ, MF) |
1000…100 м |
Гектометровые |
|
|
|
|
3…30 МГц |
Высокие частоты (ВЧ, HF) |
100…10 м |
Декаметровые |
|
|
|
|
30…300 МГц |
Очень высокие частоты (ОВЧ, VHF) |
10…1 м |
Метровые |
|
|
|
|
300…3000 МГц |
Ультра высокие частоты (УВЧ, UHF) |
10…1 дм |
Дециметровые |
|
|
|
|
3…30 ГГц |
Сверхвысокие частоты (СВЧ, SHF) |
10…1 см |
Сантиметровые |
|
|
|
|
30…300 ГГц |
Крайне высокие частоты (КВЧ, EHF) |
10…1 мм |
Миллиметровые |
|
|
|
|
300…3000 ГГц |
Гипервысокие частоты (ГВЧ) |
1…0,1 мм |
Децимиллиметровые |
|
|
|
|
В диапазонах КНЧ … ОНЧ работают службы морской навигации и системы связи с подводными
лодками, НЧ – радионавигационные наземные системы, СЧ и ВЧ – радиовещание и коротковолновая
связь.
Диапазон ОВЧ зарезервирован за системами телевещания и мобильной связи, УВЧ – системами дециметрового телевидения, а также GPS и сотовой связи, СВЧ – системами радиорелейной спутниковой и космической связи, а также средствами беспроводной компьютерной связи. Наконец,
вдиапазоне КВЧ работают радары и радиотелескопы.
Внавигационных системах роботов используют область радиочастот от 10 м (30 МГц) до 10 мм (30 ГГц).
Локационные системы роботов |
Основные положения |
Немного истории
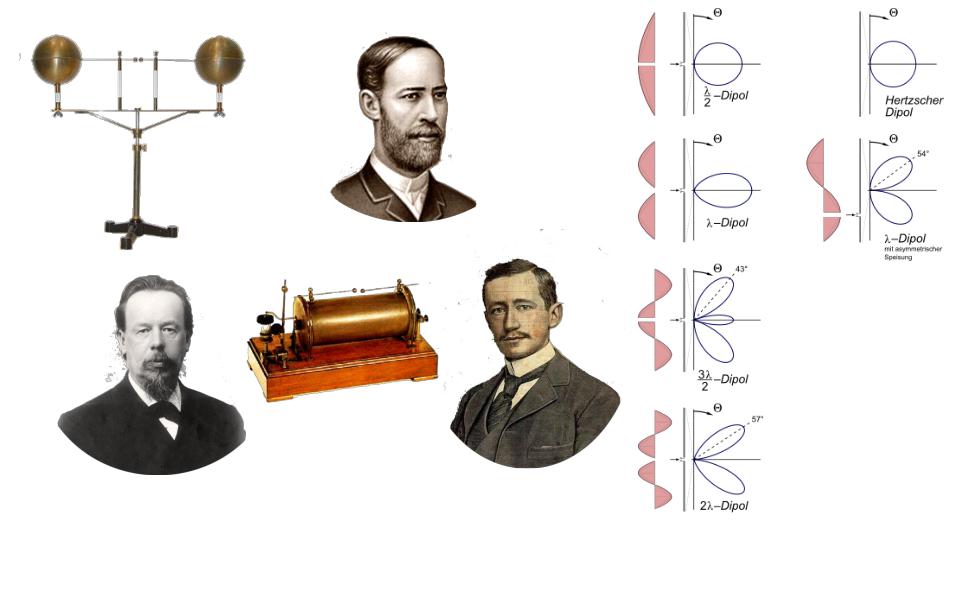
Развитие радиотехники началось с появления в 1888 г. вибратора (диполя) Герца (рис. 4, а, г)
— простейшего устройства для получения электромагнитных колебаний, дипольный момент которого быстро изменяется во времени. Технический эквивалент вибратора — небольшая антенна,
размер которой h много меньше длины волны .
б
а
в
д
г |
е |
|
Рис. 3. Вибратор Герца (а), его автор (б) и его диаграмма направленности (в), русский физик (г), катушка Румкорфа (д), итальянский электротехник, лауреат Нобелевской премии 1909 г. (е).
Локационные системы роботов |
Основные положения |
Затухание
Под затуханием будем понимать некоторую интегральную характеристику, определяющую потерю энергии колебаний в среде и приводящую к ослаблению амплитуды сигнала. Затухание
сигнала влияет на дальность его распространения.
В линейных системах с одной степенью свободы амплитуда u колебаний убывает с расстоянием x
по экспоненциальному закону:
u u0e x,
где — коэффициент затухания.
Для механической системы = b/(2m) (b — коэффициент скоростного трения, m — масса колеблющегося тела), для электрического колебательного контура = R/(2L).
Теоретически затухание длится бесконечно долго, однако на практике колебательный процесс считают закончившимся, если его амплитуда составляет 1% от начальной, т. е. e 0,01, или
= 4,6/ .
Винженерных расчетах для определения затухания сигнала также используют интегральный
параметр, называемый коэффициентом ослабления Kосл:
Kосл Pпp / Pизл,
где Pпр, Pизл — мощность сигнала на входе приемника и на выходе излучателя соответственно.
Ослабление сигнала зависит от расстояния l между приемником и излучателем (или предметом) и свойств среды.
В пассивной ЛС, где волна проходит расстояние до предмета один раз l  kpPизл / Pпр
kpPизл / Pпр
В активной ЛС дальность можно определить по времени возвращения отраженного сигнала:
l c t / 2
Локационные системы роботов |
Основные положения |

Направленность
Направленность излучателя (приемника) ЛС — это свойство, заключающееся в наличии некоторой пространственной избирательности, т. е. способности излучать (принимать) волны в
одних направлениях в большей степени, чем в других. Направленность преобразователя позволяет
увеличить соотношение сигнал/шум как в режиме излучения, так и в режиме приема сигнала. Для направленного излучения необходимо, чтобы волновой размер излучателя был больше 1:
d хар 1
где dхар — характерный размер излучателя (например,
его диаметр).
Вобщем случае диаграммы направленности (рис.
4)излучателя и приемника отличаются. Это характерно, например, для оптических ЛС.
Направленность излучателя (приемника) описывается
двумя параметрами:
•характеристикой направленности;
•коэффициентом концентрации.
Характеристикой направленности датчика называется выражение вида
D(r) P(r) / P(r0 ),
где P(r), P(r0) — мощности фиксируемых на одинаковом расстоянии от центра преобразователя сигналов в направлениях, характеризуемых радиусвекторами r и r0 соответственно.
ЛС
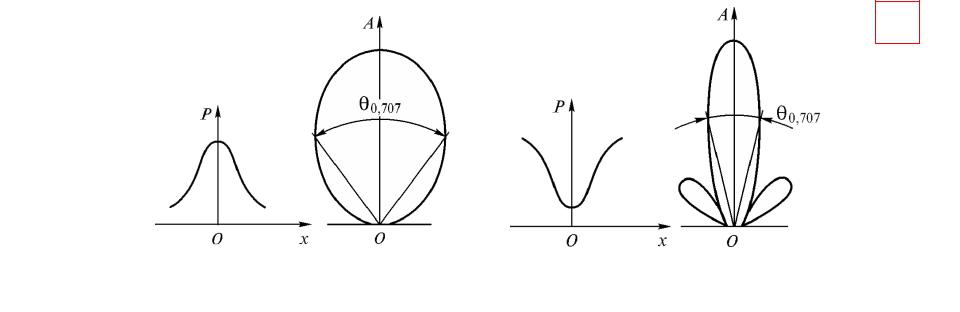
в
Рис. 4. Диаграмма направленности в полярной (а) и декартовой (б) системах координат (θ0,707 — угловая ширина главного максимума по уровню 0,707), диаграмма антенны Уго-Яги (в)
Локационные системы роботов |
Основные положения |
Диаграммы направленности
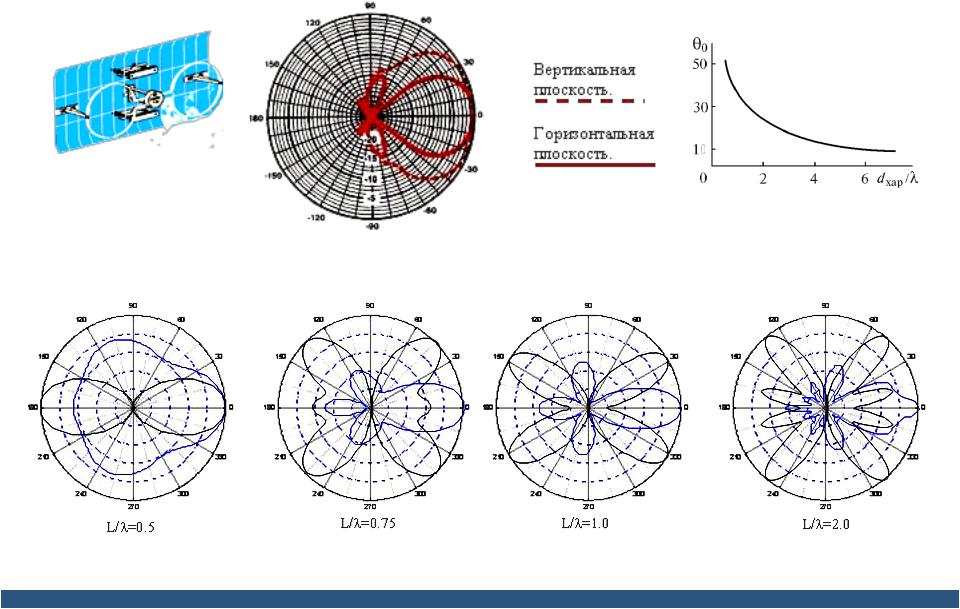
Направленность излучателя и приемника, а также форма диаграммы направленности зависят от их волнового размера (рис. 5, 6).
а
в
б
Рис. 5. Антенна сотовой связи ЛИРА-450 (а) и ее диаграммы направленности (б), зависимость угловой ширины главного максимума θ0,707 от волнового размера (в)
Рис. 6. Зависимость формы диаграммы направленности от волнового размера излучателя
Локационные системы роботов Основные положения
Концентрация излучения
Коэффициент концентрации, или коэффициент направленного действия Kнд характеризует меру концентрации излучаемой энергии вдоль некоторого направления (обычно направления главного максимума диаграммы направленности):
Kнд Pmax / P,
где — мощность сигнала в направлении главного максимума на некотором расстоянии l от излучателя; P — мощность сигнала гипотетического «ненаправленного» излучателя на том же расстоянии.
Под ненаправленным понимается излучатель с диаграммой направленности в форме шара. Для простейших преобразователей ЛС (диполей) Kнд = 1,5.
В современных ЛС, преобразователи которых состоят из большого числа элементарных диполей
(антенные решетки), существует возможность управления диаграммой направленности путем
соответствующего амплитудно-фазового распределения излучения по поверхности излучателя
или приемника (рис. 7).
!
Рис. 7. Зависимость вида диаграммы направленности от амплитудного распределения мощности P(x)
Локационные системы роботов |
Основные положения |
2. Модуляция сигналов
Основным принципом передачи информации в ЛС является модуляция — процесс изменения одного или нескольких параметров высокочастотного модулируемого колебания по закону информационного низкочастотного сигнала.
В результате модуляции спектр информационного сигнала переносится в область высоких частот.
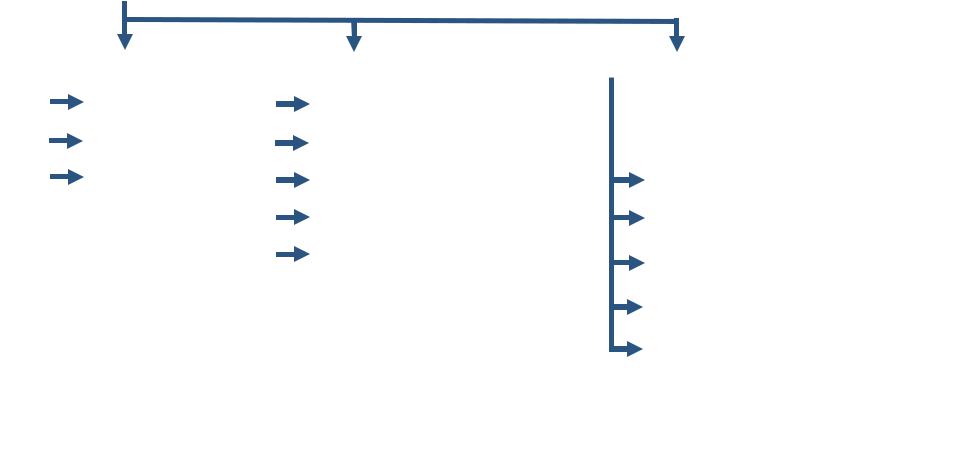
Виды модуляции
аналоговая |
импульсная |
||||||
|
|
|
амплитудная |
|
|
|
амплитудно-импульсная |
|
|
|
частотная |
|
|
|
частотно-импульсная |
|
|
|
фазовая |
|
|
|
фазово-импульсная |
|
|
|
|||||
|
|
|
|
|
|
|
широтно-импульсная |
|
|
|
|
|
|
|
импульсно-кодовая |
|
|
|
|
|
|
|
|
цифровая (кодовая)
 амплитудная манипуляция
амплитудная манипуляция
 частотная манипуляция
частотная манипуляция
фазовая манипуляция
решётчатая кодированная модуляция (TCM)
гауссовская частотная
модуляция (GMSK)
квадратурная амплитудная модуляция (КАМ)
мультиплексирование с разделением по ортогональным частотам
(OFDM)
Локационные системы роботов |
Модуляция сигналов |
Основные понятия
Колебание, с помощью которого передается сигнал, называется несущим, а его частота f —
несущей частотой.
Несущее колебание имеет более высокую частоту, чем частота переносимого (модулирующего) сигнала fм, которая называется модулирующей частотой.
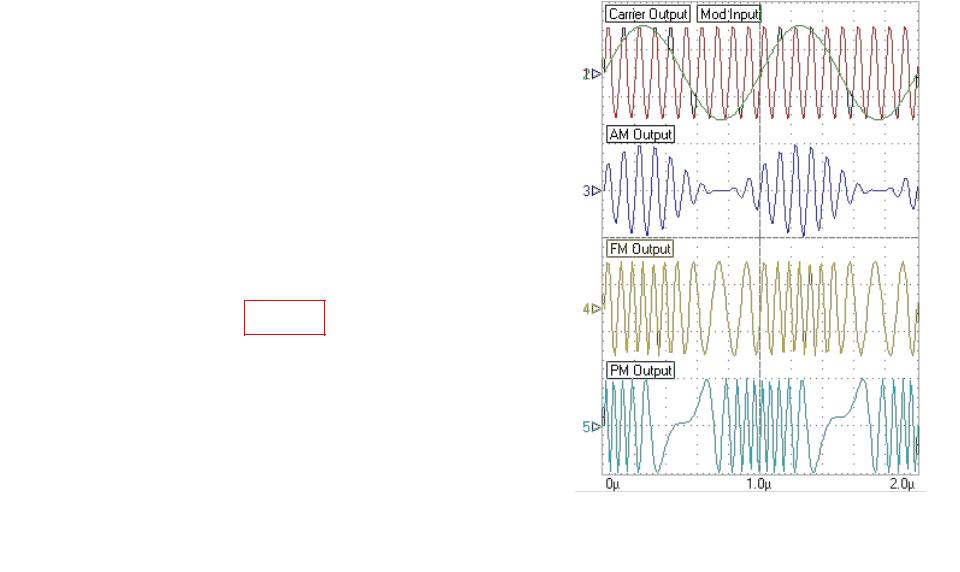
В качестве несущего используют колебания различной формы (прямоугольные, треугольные и т. д.), однако чаще всего применяются гармонические колебания. В зависимости от того, какой из параметров несущего колебания изменяется различают амплитудную,
частотную, фазовую и др. виды модуляции (рис. 8).
Модуляция дискретным сигналом называется цифровой модуляцией или манипуляцией.
При непрерывной (аналоговой) модуляции частоту
несущего колебания f выбирают из условия:
f 5 fм
а
б
При дискретной (импульсной и кодовой) модуляции |
в |
||
частота следования импульсов fи должна удовлетворять |
|
||
теореме Шеннона-Котельникова: |
|
||
|
|
|
|
|
fи 5 fм max |
|
|
где fм max — максимальная частота модулирующего |
г |
||
|
|||
сигнала. |
Рис. 8. Модуляция: а – несущая частота и |
||
|
|
|
модулирующий сигнал, , б – АМ, в – ЧМ, г - ФМ |
|
|
|
|
|
Локационные системы роботов |
Модуляция сигналов |
|
Амплитудная модуляция
В общем случае амплитудно-модулированный сигнал определяется выражением:
u(t) uм (t) cos t, |
|
|
где uм(t) — амплитуда модулирующего сигнала, причем |
duм |
u . |
|
dt |
м |
2 f — круговая частота несущего колебания. |
|
|
|
|
Если изменение амплитуды несущего колебания u(t) пропорционально модулирующему сигналу, то АМ является линейной.
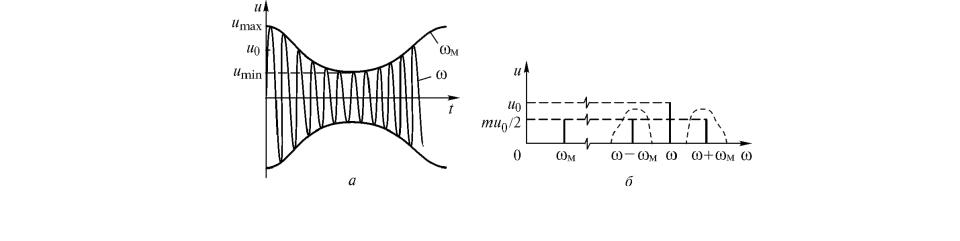
В простейшем случае, когда модулирующий сигнал является гармоническим (рис. 9), получим: u(t) u0 (1 m cos мt) cos( t ), или (при =0):
|
u(t) u |
cos t |
1 |
mu cos( |
)t |
1 |
mu |
cos( )t. |
|||||||
|
|
|
|||||||||||||
|
0 |
2 |
|
0 |
|
м |
2 |
|
0 |
м |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
здесь u0 |
— амплитуда несущего колебания; m — глубина модуляции, характеризующая степень |
||||||||||||||
изменения амплитуды: |
|
uм max uм min |
|
|
|
|
|
|
|
|
|
||||
|
|
m |
, |
0 m 1, |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
u |
u |
|
|
|
|
|
|
|
|
|
||
|
|
|
м max |
м min |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
! |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9. Амплитудно-модулированный сигнал (а) и его спектр (б)
Локационные системы роботов |
Модуляция сигналов |
Амплитудная модуляция
Локационные системы роботов |
Модуляция сигналов |