

6-1-воротников
.pdfГидроакустические комплексы
Гидроакустика является единственным надежным средством связи под водой (рис. 56, а). Эффективной системы передачи электромагнитных волн под водой на значительное расстояние еще не создано.
Для этих целей используют устройства звукового (300 … 10000 Гц) и ультразвукового диапазонов.
б
а
Рис. 56. а — система гидроакустической связи, б — автономная гидроакустическая система II (4 гидрофона, эхолот 130 кГц, датчики давления и температуры, компас)
Всостав гидроакустических комплексов входят:
гидролокаторы;
эхолоты — являются разновидностью гидролокаторов более узкого назначения;
шумопеленгаторы (пассивные средства подводного наблюдения) — предназначены для определения направления на источники шума.
Локационные системы роботов |
Датчики акустической локации |

Японское цунами: запись с гидрофона
Локационные системы роботов |
Датчики акустической локации |

Японское цунами: схема распространения
Локационные системы роботов |
Датчики акустической локации |

Микрофоны
Микрофон (от греч. μικρός — маленький, φωνη — голос) — прибор,
преобразующий звуки, голос, музыку в электрические колебания.
Первым практически используемым микрофоном был угольный, созданный англичанином Дэвидом Хьюзом в 1878 г. (рис. 57). Далее
конструкция была усовершенствована Т. Эдисоном, заменившим
угольный стержень на угольный порошок.
|
|
Рис. 57. Конструктор |
|
Классификация микрофонов |
микрофона |
||
|
|
|
|
|
|
|
|
порошковые |
|
электродинамические электростатические |
пьезоэлектрические |
угольные |
|
конденсаторные |
|
|
|
|
электромагнитные
электретные
полупроводниковые
и MEMS-микрофоны
а
б |
д |
|
ж
в
г |
е |
|
Рис. 58. Микрофоны: порошковый (а), электромагнитный (б), динамический (в), конденсаторный (г), электретный (д), MEMS-микрофон (е), пьезоэлектрический (ж).
Локационные системы роботов |
Датчики акустической локации |

Конструктивные особенности микрофонов
Современные микрофоны представляют собой последовательную цепь преобразователей, содержащую, как правило, четыре каскада преобразования информации:
•акустический (приемный);
•акустико-механический;
•механоэлектрический;
•электрический (согласующий).
Первый и второй каскады микрофона служат для формирования нужной частотной характеристики чувствительности и диаграммы направленности,
соответственно.
Различают два типа микрофонов:
•ненаправленные (нулевого порядка, круговые)
или приемники давления,
•направленные (градиентные).
Градиентные микрофоны содержат несколько акустических входов. Для получения диаграммы
восьмеркообразной формы – два симметричных входа,
кардиоидной – несколько несимметричных (рис. 59).
Ненаправленные микрофоны не подавляют шума.
двунаправленные |
ненаправленные |
|
Оркестровый |
|
|
|
|
|
|
|
Для интервью |
|
однонаправленные |
|
Для синхронной стереозаписи |
|
|
||
|
|
|
|
|
|
|
|
В особую группу выделяют комбинированные |
|
микрофоны, или микрофоны с переменной диаграммой |
|
направленности и направленные микрофоны, |
Наиболее помехозащищенный |
использующие резонансные схемы, звуководы и |
|
параболические отражатели. |
Рис. 59. Диаграммы направленности микрофонов |
Локационные системы роботов |
Датчики акустической локации |
Студийные микрофоны
По величине выходного сопротивления микрофоны разделяют на два класса:
•высокоимпедансные (5 …10 кОм);
•низкоимпедансные (менее 250 Ом).
Высокоимпедансные микрофоны обладают более высоким уровнем сигнала и используются в бытовой и полупрофессиональной записи.
Низкоимпедансные микрофоны применяются в профессиональных студиях. Несмотря на
сравнительно низкий выходной уровень сигнала, они менее чувствительны к посторонним помехам и шуму и качественно воспроизводят высокие частоты даже при использовании длинных кабелей.
Студийные микрофоны
динамические |
конденсаторные |
(электродинамические) |
|
Электродинамические микрофоны в зависимости от конструкции механической колебательной системы подразделяют на катушечные и ленточные. Ленточный
микрофон обладает наиболее естественной передачей звука.
Конденсаторные микрофоны разделяют на одно- и
двухмембранные (рис. 60).
Микрофон TLM 127 имеет 5 диаграмм направленности – круговая, кардиоида, суперкардиоида, гиперкардиоида и восьмерка.
Рис. 60. Двухмембранный конденсаторный студийный микрофон
Локационные системы роботов |
Датчики акустической локации |
Основные характеристики микрофона
Локационные системы роботов |
Датчики акустической локации |
Частотные характеристики микрофонов
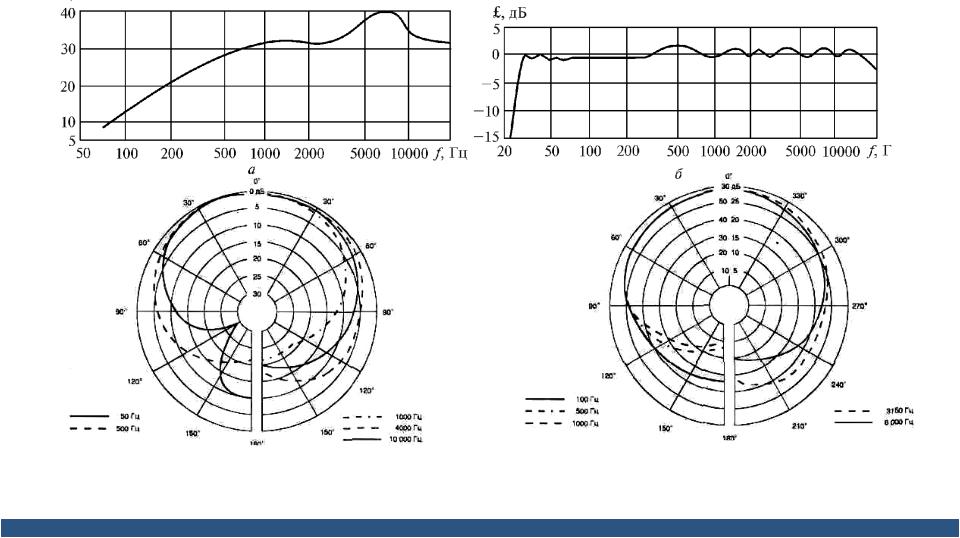
Важнейшим требованием, предъявляемым к микрофонам для мехатронных и робототехнических
систем, является равномерность их АЧХ и диаграммы направленности. У микрофонов с неравномерной АЧХ возникают нелинейные искажения при передаче звука, которые могут привести к самовозбуждению акустической системы. На рис. 61, а, б представлены АЧХ, а на рис. 61, в, г – диаграммы направленности электродинамического и электретного микрофонов.
|
в |
г |
|
|
|
Рис. 61. |
АЧХ электродинамического микрофона МД-78 |
(а) и электретного микрофона МКЭ-2 (б) и их |
диаграммы направленности (в) и (г) соответственно. |
|
|
|
Локационные системы роботов |
Датчики акустической локации |

Направленные микрофоны
При работе с удаленными объектами значительно ослабляется уровень контролируемого
звукового поля, как вследствие общего уменьшения величины звукового давления, так и наличия естественных рассеивателей энергии, турбулентностей атмосферы и пр. В этом случае используют направленные микрофоны (рис. 62).
Дальность, м |
1 |
2 |
4 |
8 |
16 |
32 |
64 |
100 |
|
|
|
|
|
|
|
|
|
Ослабление громкости сигнала, дБ |
0 |
-6 |
-12 |
-18 |
-24 |
-30 |
-36 |
-45 |
|
|
|
|
|
|
|
|
|
Например, уровень громкости разговора, полученного с расстояния 100 м составляет менее 20 дБ, что ниже пороговой акустической чувствительности обычных микрофонов.
Классификация направленных микрофонов
параболические |
плоские акустические |
трубчатые |
градиентные |
|
фазированные решетки |
(бегущей волны) |
|
а |
б |
в |
г |
Рис. 62. Направленные микрофоны: миниатюрный трубчатый (а), стетоскоп (б), параболический (в) |
и лазерный (г) |
||
Локационные системы роботов |
Датчики акустической локации |
|
|

Как сделать параболический микрофон
Локационные системы роботов |
Датчики акустической локации |