

6-1-воротников
.pdfЧастотный дискриминатор
Принцип действия частотного дискриминатора (детектора наклона) основан на пропорциональном изменении амплитуды напряжения на колебательном контуре с элементами R,
L и C при вариациях мгновенных значений частоты модулированных колебаний. |
|
|||||||
ЧМ сигнал |
с |
несущей |
0 |
подаётся на |
|
! |
||
колебательный контур |
с частотой |
резонанса |
|
|
||||
|
|
|||||||
к 0. |
|
|
|
|
|
|
|
|
При отклонениях несущей частоты 0 |
|
|
||||||
модулированных |
колебаний |
от |
резонансной |
|
|
|||
частоты к |
контура |
изменяется |
амплитуда |
а |
|
|||
выходного сигнала Uвых, причем линейность |
|
|||||||
|
|
|||||||
преобразования |
тем |
ниже, |
чем острее |
|
|
|||
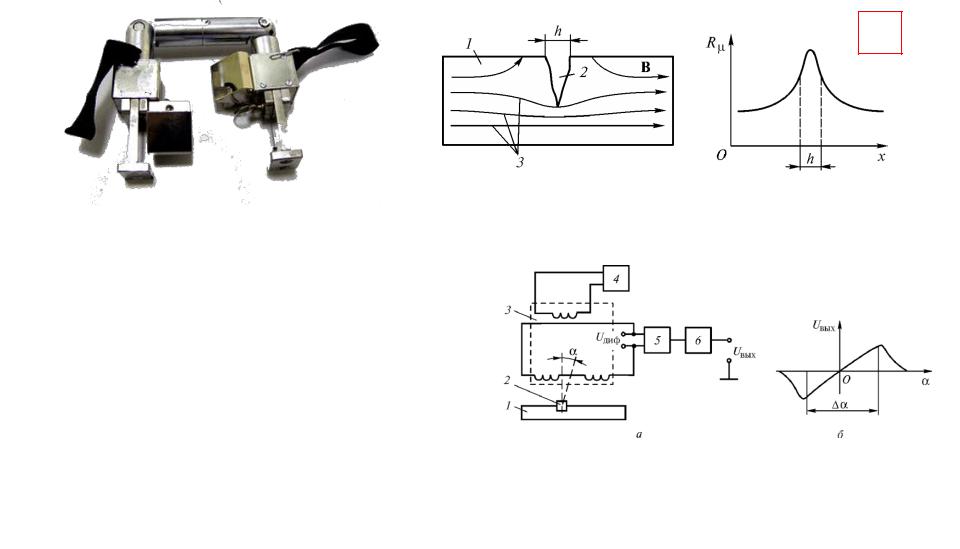
резонансная кривая (рис. 19, а). Резонансные свойства контура зависят от его добротности
, определяемой выражением:
k LCR ,
где k — константа.
Добротность контура выбирается так, чтобы при удвоенной девиации частоты рабочий б участок АЧХ был линейным.
Для обеспечения линейной функции преобразования используют двухконтурные и дифференциальные дискриминаторы (рис. 19,
б).
Рис. 19. Частотный дискриминатор: а — принцип преобразования сигнала в частотном дискриминаторе: 1 — входной сигнал; 2 — функция преобразования колебательного контура; 3 выходной сигнал, б – электрическая схема
Локационные системы роботов |
Модуляция сигналов |
3. Электромагнитные ЛС
Принцип работы электромагнитных локационных систем (ЛС) основан на взаимодействии магнитного поля преобразователя с металлическими объектами. В качестве ЧЭ служат дроссели и трансформаторы различной формы.
Классификация
Магнитные |
Вихретоковые |
Радиоволновые |
Локационные системы роботов |
Электромагнитные ЛС |
Магнитные ЛС
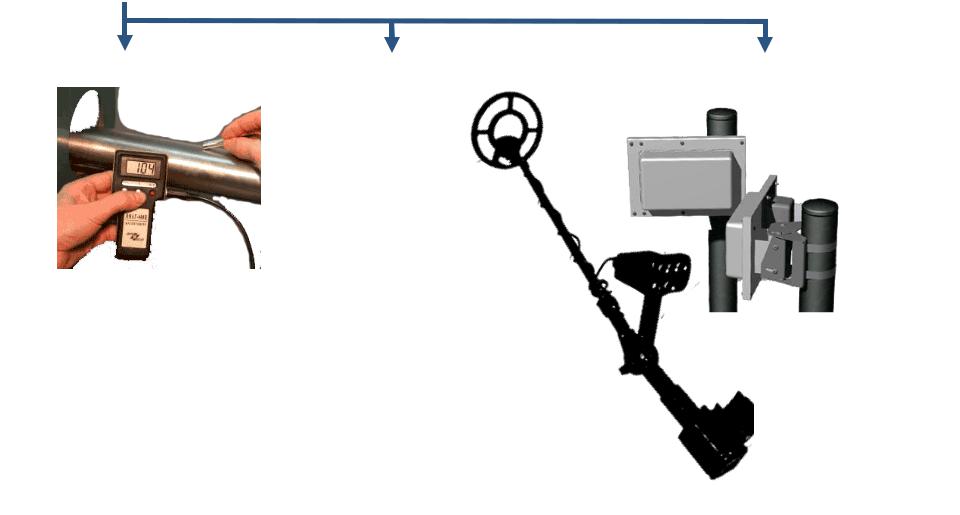
Магнитные ЛС являются основными средствами неразрушающего контроля в литейном и прокатном производствах. Их используют для задач дефектоскопии — выявления нарушений сплошности предметов из ферромагнитных материалов, обнаружения мелких (3…10 мкм) трещин на их поверхности, определения толщины немагнитных покрытий на магнитной основе и толщины стенок изделий из магнитных и немагнитных материалов (рис. 20).
!
а б в
Рис. 20. Магнитный дефектоскоп (а) и схема распределения магнитного поля (б) и изменение магнитного сопротивления (в) в области дефекта: 1 — деталь; 2 — трещина; 3 — магнитные линии
В робототехнике индуктивные и индукционные |
|
|||
датчики используют для измерения зазоров в |
|
|||
магнитных цепях, в том числе при построении |
|
|||
головок |
наведения |
транспортных складских |
|
|
роботов. Схема такой головки, включенной в |
|
|||
состав |
навигационной |
системы внутрицехового |
|
|
транспортного робота приведена на рис. 21. |
|
|||
Сердечник датчика выполняют из материала с |
Рис. 21. Схема индукционной головки наведения (а) и |
|||
ее функция преобразования (б): 1 — поверхность пола; |
||||
большой магнитной проницаемостью (феррита, |
||||
2 — металлическая шина; 3 — датчик; 4 — генератор; |
||||
пермаллоя и др.) |
|
|||
|
5 — приемник; 6 — фазочувствительный выпрямитель |
|||
|
|
|
||
|
Локационные системы роботов |
Электромагнитные ЛС |
||
Вихретоковые ЛС
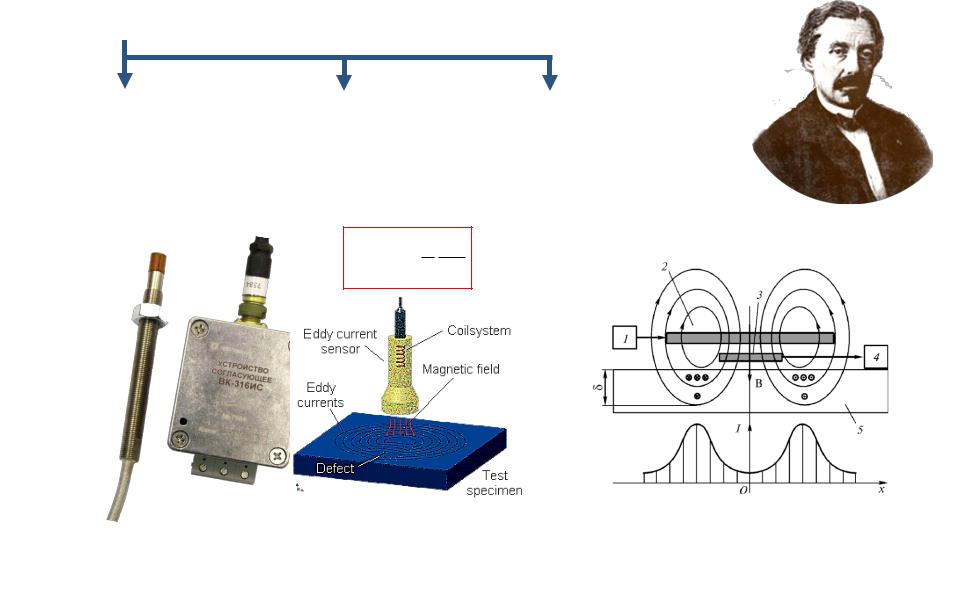
Работа вихретоковой ЛС основана на взаимодействии внешнего магнитного поля с электромагнитным полем вихревых (замкнутых) токов, наводимых возбуждающей катушкой в любом электропроводящем объекте (рис. 22).
Вихретоковые датчики
накладные |
проходные |
комбинированные |
Сила I вихревых токов, возбужденных в изделии, определяется уравнением
Максвелла и зависит от частоты тока обмотки возбуждения, материала объекта (его удельного электросопротивления и магнитной проницаемости), а также расстояний между катушками и объектом (рис. 23).
rot I 1 dB
dt
Рис. 22. Французский ученый
в
а |
б |
г |
Рис. 23. Вихретоковый датчик (а), принцип действия (а), схема образования (б) и эпюра вихревых токов (в): 1 — генератор; 2 — катушка возбуждения; 3 — сигнальная катушка; 4 — измеритель; 5 — металлический объект
Локационные системы роботов |
Электромагнитные ЛС |

Эффект вихревых токов
Локационные системы роботов |
Модуляция сигналов |

Система вихретокового контроля самолетного колеса
Локационные системы роботов |
Модуляция сигналов |
Функция преобразования
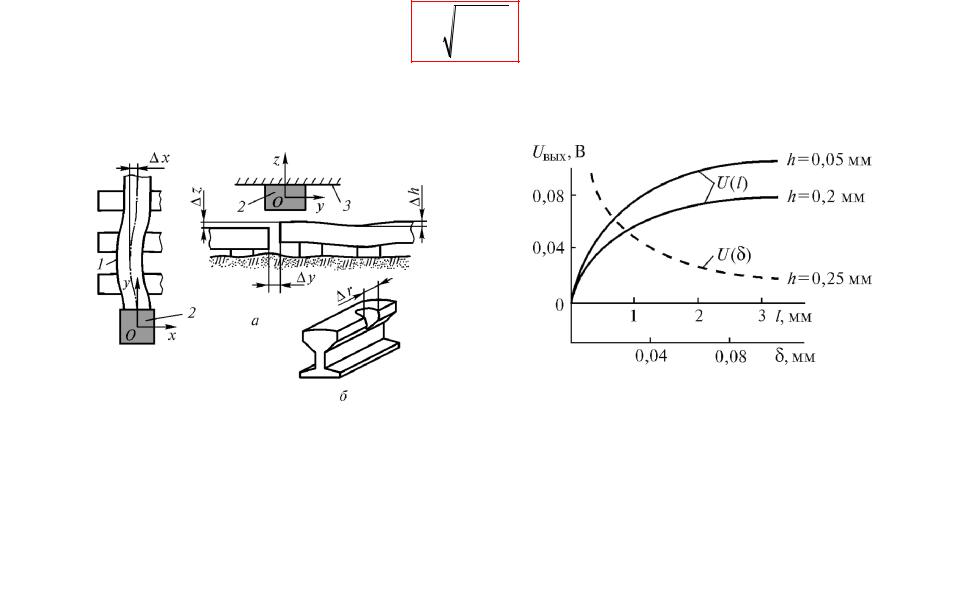
Для вихретоковой ЛС с накладным преобразователем (рис. 24) глубину проникновения вихревых токов определяют по формуле:
|
|
2 |
|
, |
в 0 |
где = 2 f — круговая частота тока возбуждения.
При работе в диапазоне частот 0,1…10 кГц для большинства металлов 0,5...5 мм и уменьшается с увеличением частоты.
в
Рис. 24. Схема установки матричного вихретокового датчика «Спектр» (а) и схема бокового износа рельса (б): 1 — рельсовая колея; 2 — датчик; 3 — вагон-дефектоскоп; в – функция преобразования датчика
Достоинства вихретоковых ЛС:
•работа с немагнитными материалами;
•многопараметричность.
Недостатки:
•высокий коэффициент влияния каналов.
Локационные системы роботов |
Электромагнитные ЛС |

Вихретоковый контроль рельсовой колеи
Локационные системы роботов |
Модуляция сигналов |

Вихретоковый спайдер
Локационные системы роботов |
Модуляция сигналов |
Сравнительная характеристика вихретоковых ЛС
Модель |
Измеряемый |
Диапазон |
, % |
fв, |
Р, |
|
Размеры, мм |
|
m, |
||
|
параметр |
измерений |
|
кГц |
Вт |
d |
l |
b |
|
h |
кг |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
ДСМ-0,1/1 |
Глубина залегания |
2 мм |
5 |
1000 |
10 |
– |
230 |
270 |
|
150 |
2,7 |
(Россия) |
трещины |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВМ-10Н (Россия) |
Шероховатость |
0,3 мм |
3 |
100 |
0,1 |
– |
160 |
110 |
|
50 |
0,5 |
|
поверхности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
» |
– |
160 |
110 |
|
50 |
0,5 |
|
Вибрации |
0,02...20 Гц |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
МТП-01 (Россия) |
Толщина покрытия |
0,2...10 мм |
5 |
Н.д. |
0,4 |
– |
220 |
130 |
|
150 |
1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
TQ -403 |
Расстояние до |
1...13 мм |
5 |
20 |
Н.д. |
20 |
65 |
– |
|
– |
0,25 |
(Швейцария) |
объекта |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
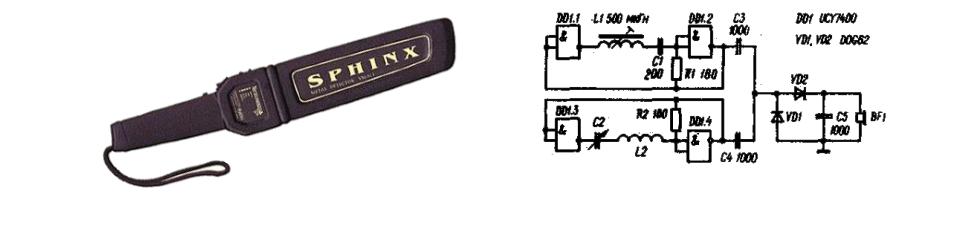
Пример построения металлоискателя
Принцип работы прибора (рис. 25, а) основан на регистрации биений, возникающих в результате смешения колебаний двух генераторов – опорного и антенного. Сигнал детектируется диодами VD1, VD2, фильтруются конденсатором С5 и поступают на головные телефоны BF1, фиксирующие изменение тональности звука (рис. 25, б).
а
б
Рис. 25. Внешний вид (а) и электрическая схема (б)
Локационные системы роботов |
Электромагнитные ЛС |