

6-1-воротников
.pdfКак сделать металлодетектор
Локационные системы роботов |
Модуляция сигналов |

Конец первой серии
Формула успеха:
З = 0,1 РК + 0,1 ЛР + 0,2 ДЗ + 0,25 П + 0,25 Д + 0,1 Т
Локационные системы роботов |
Модуляция сигналов |

Тема 6. Локационные системы роботов
1.Основные положения
2.Модуляция сигналов
3.Электромагнитные локационные системы
4.Акустические локационные системы
5.Звук и его свойства
6.Датчики акустической локации
7.Способы записи и анализа звука
8.Оптические локационные системы
9.Дальномеры
10.Навигация мобильных роботов
Локационные системы роботов
Проект шестиклассницы
Локационные системы роботов |
Модуляция сигналов |

4. Акустические ЛС
Общие сведения
В робототехнике и мехатронике под акустическими ЛС (рис. 26) понимают совокупность
акустических датчиков и средств первичной обработки информации, предназначенных для
определения геометрических и физических характеристик объектов в зоне контроля, а также их ориентации относительно выбранной системы координат.
Решаемые задачи
определение свойств среды |
прием/передача сигналов |
воздействие на материал |
а |
б |
в |
|
||
|
|
Рис. 26. Акустические приборы: а – томограф, б – гидрофон, в – ультразвуковой скальпель
Локационные системы роботов |
Акустические ЛС |

Классификация акустических ЛС
по назначению
 дальномеры
дальномеры  дефектоскопы /томографы
дефектоскопы /томографы
охранные устройства
по типу ЧЭ
 пьезоэлектрические
пьезоэлектрические
 магнитострикционные электростатические
магнитострикционные электростатические
по типу модулирующего сигнала
непрерывные
импульсные
по характеру частотного спектра
 широкополосные резонансные
широкополосные резонансные
по избирательности
 интерференционные
интерференционные
широкоугольные
Локационные системы роботов |
Акустические ЛС |
5. Звук и его свойства
Общие сведения
Распространение звука в некоторой среде описывается волновыми уравнениями:
2u |
|
1 2u |
; |
2 p |
|
1 2 p |
; |
2 |
|
|
1 2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
r2 |
c2 t2 |
r2 |
c2 t2 |
r |
2 |
c2 t2 |
||||||||||
|
|
|
|
|
||||||||||||
где u — амплитуда волны, или распространения и скорость волны;
смещение частиц среды; r, c — соответственно дальность p, — давление и плотность среды.
Частотное уравнение для звука имеет тот же вид, что и для других волновых процессов
c/ f .
Обычно звук представляет собой сложное колебание в виде линейчатого спектра с основной
(собственной) частотой f и кратными частотами — гармониками (обертонами) 2f, 3f, ... и т.д. У
гармонического колебания (тона) спектр состоит из одной частоты. Для непериодических колебаний (шумов) характерны сплошные спектры.
граничные частоты
|
нижняя |
fн = 20 кГц |
|
|
верхняя |
fв c / dэкв, где |
dэкв — длина свободного пробега молекул. |
частотные диапазоны ультразвука
нижний (1,5 104 … 105 Гц) |
|
|||
|
средний (105 |
… 107 |
Гц) |
Частоты от 109 до 1013 Гц называют гиперзвуковыми. |
|
верхний (107 |
… 109 |
Гц) |
|
Локационные системы роботов |
Особенности распространения звука |
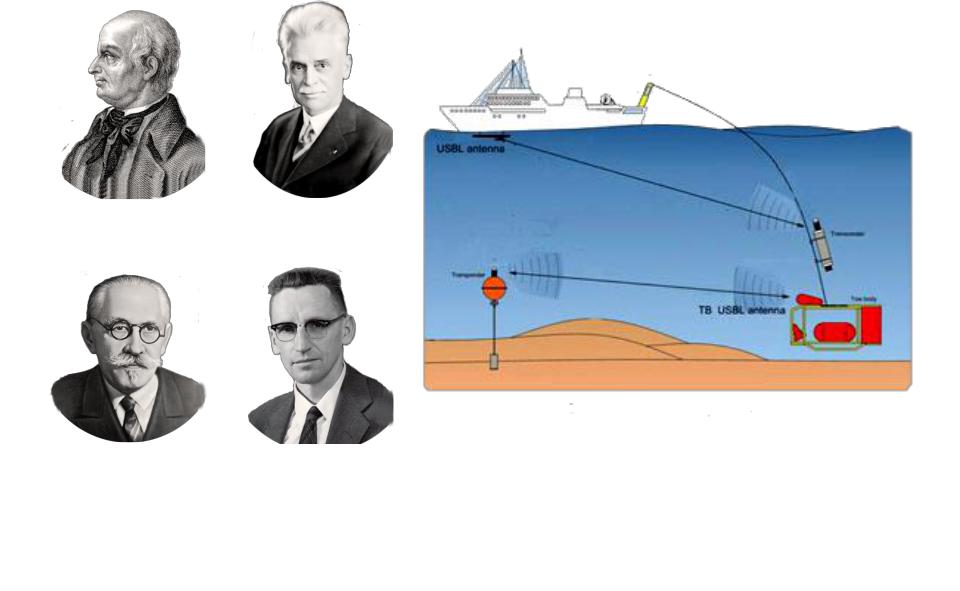
Немного истории
История исследований в области ультразвуковой локации ведет свое начало с 70-х годов XVIII в. и связана с именем итальянца Л. Спалланцани (рис. 27, а), изучавшего ночное зрение сов и летучих
мышей.
а |
б |
|
д
в |
г |
Рис. 27. Пионер изучения локации в природе (а), изобретатель пулемета (б), основоположник гидроакустики (в), американский биофизик (г), структура гидроакустической системы (д).
Локационные системы роботов |
Основные положения |

Эхолокация в океане
Локационные системы роботов |
Модуляция сигналов |
Механический и электромагнитный волновые диапазоны
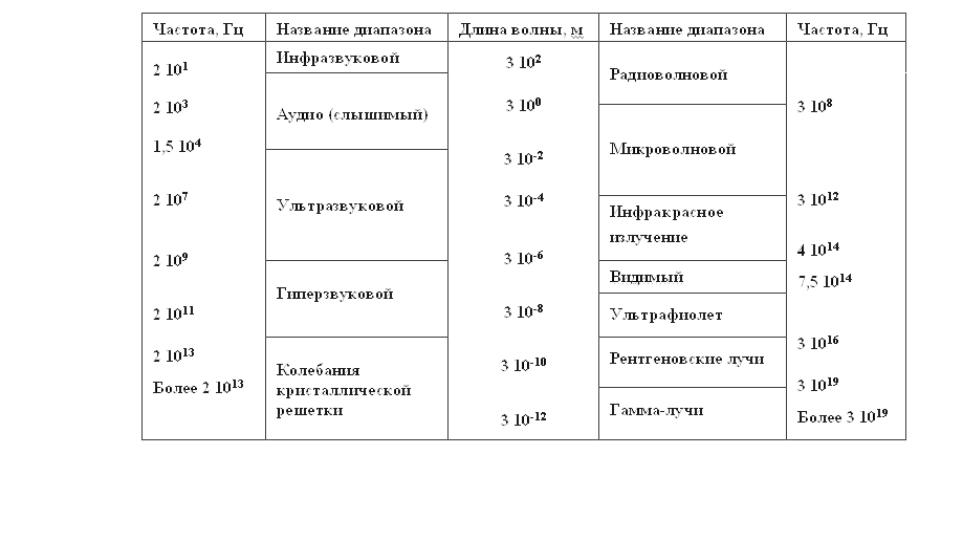
Для акустических ЛС по сравнению с электромагнитными характерна значительно меньшая
скорость распространения сигналов. Для газов она составляет 0,2 … 1,5 км/c, для жидкостей — 0,5…2 км/с, для твердых сред — 2…8 км/c. Это приводит к большей разрешающей способности ультразвуковых методов по отношению к электромагнитным при равных частотах (табл.1).
Таблица 1. Диапазоны звуковых и электромагнитных волн
Длина звуковой волны зависит от частоты и среды распространения. Так, для воздуха в самой низкочастотной области значения не превышают 3…5 см. В случае высоких частот значения в
воздухе составляют 0,34 ... 34 мкм, в воде 0,015 ... 1,5 мкм и в стали 0,05 ...5 мкм.
Локационные системы роботов |
Особенности распространения звука |