

PGS_4_prilozhenie
.pdfрасстояние от поверхности воды до пловца Н и глубина места z. Прозрачность Dnp вычисляется как разность z-Н и записывается в журнал.
6 Поиск объектов морского дна под водой производится по инструкциям, наставлениям, методикам и другим документам тех организаций, которые выделили для работы пловцов.
7. Различают следующие способы поиска:
а) круговой, при котором на дно к центру участка поиска подают спусковой конец с балластиной и ходовой конец с мусингами через метр. Пловец, спустившись к балластине, берет в руку ходовой конец, удаляется от балластины на расстояние видимости до нее и начинает движение по кругу. Сделав полный круг, пловец останавливается, удаляется от балластины на расстояние Dnp- dnep, равное величине прозрачности Dnp с учетом перекрытия смежных полос поиска dпep, и вновь идет по кругу, но в обратном направлении. Так, последовательно, двигаясь от центра и по кругу в разных направлениях, пловец обследует дно.
Величина перекрытия dпер устанавливается из опыта таким образом, чтобы не допустить разрыва при осмотре полос дна;
б) галсовый, который применяется при поиске на относительно больших площадях вблизи берега. Обеспечение выполняется аналогично обеспечению промера по створам, указываемому направлению или по линю.
Междугалсовое расстояние назначается аналогично предыдущему способу (L = Dпр- dnep). При назначении перекрытия учитывают чувствительность створа. Рекомендуется буксировка пловца шлюпкой. Сигнальный конец крепится к пловцу и удерживается на шлюпке. Расстояние пловца от грунта поддерживается в зависимости от прозрачности воды. Скорость буксировки не должна превышать 3 уз, так как при большей скорости ухудшаются условия осмотра, и увеличивается опасность удара о неровности и предметы на дне;
в) по путевому тросу, при котором участок поиска обвеховывают, между границами обвехования по грунту прокладывают путевой трос с балластинами на концах, обозначаемыми буйками.
Пловец, передвигаясь вплавь вдоль путевого троса, осматривает полосу дна. Закончив галс, трос с балластинами и буйками под наблюдением пловца переносят на следующую полосу, и осмотр продолжается. Расстояние между последовательными положениями троса рассчитывается, как в предыдущих случаях (L Dnp dnep ).
8 При обнаружении объекта поиска пловец фиксирует его местонахождение, заканчивает поиск на всей назначенной площади и только после этого приступает к обследованию найденного объекта.
Обследование объекта заключается в его внешнем осмотре, измерении, последующих зарисовках и описании. Определяются размеры объекта (длина, ширина, высота), его положение на грунте. Находится место с наибольшим превышением над дном и над ним измеряется глубина ручным лотом с катера (шлюпки) или выверенным по ручному лоту глубиномером, имеющимся у пловца. Над этим местом с катера определяются координаты наименьшей
202
глубины (с контролем), измеряются окружающие глубины. Пробы грунта берутся пловцом или с катера.
9 После подъема пловца на борт все сведения об объекте и произведенные измерения должны быть сразу же записаны в журнал водолазного обследования, после чего обследование считается законченным.
III Отчетность
10 По результатам водолазного обследования объектов морского дна составляются акты водолазного обследования и объяснительная записка (технический отчет).
В актах водолазного обследования указывается:
кем и когда произведены работы;
способ обследования;
состояние моря, погоды, видимость на грунте;
координаты объектов поиска и размеры площади водолазного обследования;
описание обнаруженных объектов, рельеф дна, грунт;
наименьшие глубины над объектами, размеры объектов, их положение, ориентация, окружающие глубины;
выводы по поиску и обследованию (например: «На дне моря в обследованном районе 200 200 м с центром в точке φ = 45° 19,21' N, λ=36° 32,53'
Еникаких навигационных препятствий нет». При обнаружении объекта в выводах указывается наименьшая глубина над объектам, размеры объекта, его положение
иориентация).
Какту прилагаются рисунки обнаруженных объектов и схемы гидрографического обеспечения водолазного обследования. На схемах показываются буи (вехи), обозначающие район обследования, сетки изолиний, использованные для определения места, найденные объекты с расстояниями от них до буев (вех).
Акты водолазного обследования подписываются старшим группы гидрографов, старшим группы пловцов и пловцами, производившими поиск и обследование объектов. Акты утверждаются начальником подразделения Аварийно-спасательной службы, а в случае обследования пловцами-любителями - начальником подразделения Гидрографической службы.
В объяснительной записке (техническом отчете) указывается:
кем, когда, какие объекты обследованы;
исходные данные;
способ определения места, технические средства, поправки приборов, а также поправки глубин за уровень;
результаты обследования;
выводы.
Кобъяснительной записке (техническому отчету), кроме актов водолазного обследования, прилагаются журналы водолазного обследования, вычислительные
иописательные материалы.
203
Приложение 28
к ст. 4.3.4
Проложение галсов и координатная привязка точек измерения глубин при съемке со льда
1 В гаванях, портах и на рейдах
При промере в гаванях, портах и на рейдах для проложения галсов промера разбивается сеть квадратов на льду. Для разбивки сети целесообразно использовать несколько (не менее двух электронных тахеометров с комплектом нескольких отражателей и как минимум два геодезических приемника СРНС.
Максимальный размер квадрата не должен превышать дальности измерения расстояния светодальномером тахеометра. Для современных серийных отечественных электронных тахеометров дальность измерения расстояния составляет 1-1,5 км. Следовательно, наибольший размер квадратов не должен превышать 0,7-1 км.
Отдельные вершины сети квадратов определяются как пункты АС 1, 2 классов в зависимости от класса выполняемой съемки, как предусматривается статьей 3.3.4 Настоящих правил. Разбивка сетки квадратов осуществляется следующим образом.
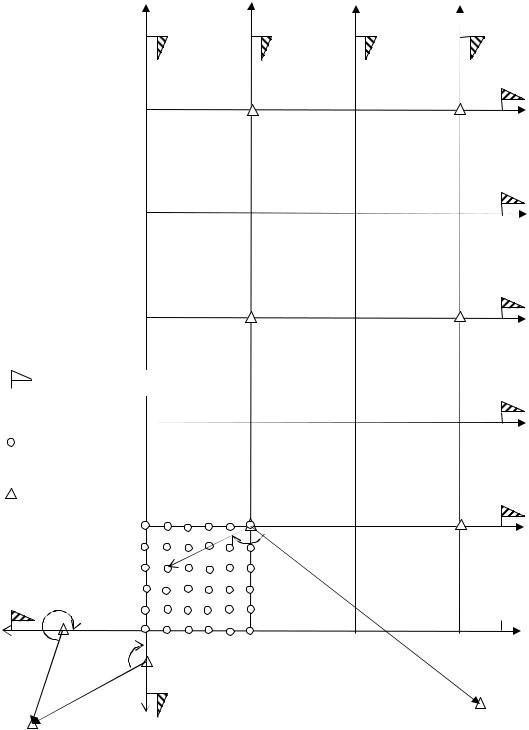
Из точек, расположенных на берегу, определенных и закрепленных в грунте как пункты АС тахеометром (теодолитом) провешиваются две магистрали - взаимно перпендикулярных направлений – (магистраль 1 и магистраль 2), как показано на рисунке 1. Для возможности последующего повторения съемки и сопоставления полученных результатов направления магистралей измеряются от направлений с пунктов АС на пункты государственной геодезической сети. На льду в самых удаленных точках района съемки направления магистралей закрепляются вбитыми в лед металлическими штырями, которые увенчиваются флажками для лучшей видимости из точек сети. В точке пересечения этих направлений на льду намечается первая вершина квадрата, которая также закрепляется металлическим штырем с ярлыком (с указанием на нем номера строки и номера колонки планируемой сети квадратов - 1,1). Тахеометр переносят и устанавливают на этой точке, а затем последовательно по первой и второй магистралям с помощью светодальномера тахеометра и отражателей, перемещаемых по направлениям магистралей на требуемое расстояние (кратное 100 м), производится определение положения следующих вершин первого квадрата (2,1) и (1,2), удаленных от первой вершины на заданное расстояние, соответствующее установленному размеру стороны квадрата, которые также закрепляются на льду с помощью металлических штырей с ярлыками. На ярлыки наносят порядковый номер вершины (например, номер строки и номер столбца сети квадратов). Затем производится разбивка одной из сторон первого квадрата сетки (например, по магистрали, совпадающей с направлением наименьшей изменчивости глубин, например, как показано на рисунке, магистрали 2) на пикеты с требуемой для съемки в данном направлении подробностью (например,
204
 Ориентир направления
Ориентир направления
Рисунок 1 - Схема разбивки магистралей и пикетов на льду для съемки рельефа дна акватории.
Положение четвертой вершины (2,2) первого квадрата получают и закрепляют металлическим штырем в точке пересечения направлений перпендикулярных магистралям 1 и 2 из точек установки тахеометра в вершины (2,1) и (1,2) первого квадрата. Данные направления также закрепляются в наиболее удаленных точках участка съемки металлическими штырями, увенчиваемыми флажками для лучшей их видимости. В вершине (2,2) первого квадрата устанавливают переносной приемник СРНС и производят геодезические измерения одновременно с измерениями приемника, установленного на береговом опорном геодезическом пункте. После разбивки на пикеты стороны первого квадрата тахеометр из начальной вершины (1,1) первого квадрата переносят и устанавливают в его вершине (2,2). По завершению разбивки пикетов тахеометром, установленным в вершине (2,1) его переносят по направлению магистрали в вершину (3,1), где производится определение вершин следующего квадрата и разбивка стороны квадрата параллельной магистрали 2 на пикеты. После этого тахеометр из вершины (3,1) переносят в вершину (3,2), где с его помощью разбивают пикеты на стороне между вершинами (3,2) и (3,3). После выполнения геодезических измерений в освободившуюся вершину (2,2) устанавливают тахеометр и ориентируют его на один из геодезических пунктов на берегу. В это время промерная партия начинает бурить лунки на стороне первого квадрата между вершинами (1,2) и (2,2) в точках определяемым по направлению и расстоянию тахеометром, установленным в вершине (1,2). Далее производится измерение глубин на всех пикетах на стороне между вершинами (1,2) и (2,2) кроме самих вершин. Положение каждой точки измерения производится тахеометром, установленным в вершине (2,2) как из пункта АС по измеренным направлению и расстоянию до отражателя, устанавливаемого над блоком троса или преобразователем эхолота в момент измерения глубины. После измерения глубин по данному профилю тахеометр, установленный в вершине (1,2) переносится в ближайший пикет на стороне между вершинами (1,2) и (1,1). Далее производится бурение лунок по направлению и расстоянию, указываемому тахеометром, установленному на данном пикете, а определение положения измеренных в каждой лунке глубин производится по направлению и расстоянию, измеряемым тахеометром, установленным в вершине (2,2). Поскольку вершина (1,2) освободилась, в этой точке может быть пробурена лунка и измерена глубина и ее положение. Положение тахеометра в вершине (2,2) остается неизменным для определения положения измеряемых глубин в остальных трех квадратах, для которых эта вершина является общей. Глубина в ней измеряется после завершения измерений на всех пикетах четырех примыкающих к вершине квадратов сети. Координаты вершины (2,2) принимается за положение измеренной глубины. Тахеометр, использовавшийся для разбивки пикетов по направлениям перпендикулярным магистрали 2 после завершения работ в первом квадрате перемещают в вершину (4,1) или (1,4) в зависимости от выбранного направления продвижения выполнения работ. Аналогично выполняются операции
206
разбиения площади съемки на квадраты и пикеты, измерения глубин и определения их положения.
2 На каналах, фарватерах и в узкостях
При съемке на каналах, фарватерах и в узкостях сеть пикетов разбивается от магистрали, прокладываемой по оси объекта.
Порядок разбивки следующий: с берегового опорного пункта ГГС или АС помощью тахеометра провешивают магистраль и разбивают пикетами на отрезки, равные заданным расстояниям между поперечными оси профилями. Если длина прямолинейного участка канала, соответствующая данной магистрали, превышает максимальную дальность светодальномера тахеометра, на магистрали сначала разбивают пикетами на отрезки, равные ближайшему кратному 100 м значению максимальной дальности дальномера) и с помощью приемников СРНС определяют положение пикетов как пунктов АС. Если фарватер имеет повороты, намечается новая магистраль, соответствующая его новому прямолинейному участку. Точки поворота в этом случае также определяются как пункты АС. Затем тахеометр устанавливается на пикетах, определенных как пункты АС, который ориентируют по геодезическому пункту на берегу. Другой переносной тахеометр последовательно устанавливают на пикетах магистрали и провешивают в обе стороны от магистрали перпендикулярные направления, а с помощью дальномера и отражателя на этих направлениях размечают пикеты с требуемой подробностью измерения глубин на профилях. Измерение и координирование положения измеренных глубин производится также как и в пункте 1 данного Приложения. Пикеты выставляют с таким расчетом, чтобы выявить границы фарватера.
Чтобы при изменении направления магистрали не оставалось секторов, не обследованных промером, следует от точки поворота в обратном направлении той магистрали, на которую переходим, наметить один-два пикета на расстояниях, равных принятому расстоянию между поперечными профилями. Далее из этих точек при помощи тахеометра (только в сторону противоположную направлению поворота новой магистрали) отбивают направления профилей, на которых намечают пикеты - места лунок для измерения глубин.
3 В прибрежных районах полярных морей
Разметка системы квадратов пикетов и выполнение съемки рельефа дна в прибрежных мелководных районах полярных морей осуществляется также на основе размечаемых на площади съемки магистралей. В зависимости от удаления района съемки от берега и наличия исходных геодезических пунктов магистраль может прокладываться:
б) При наличии пункта геодезической сети, удаленного от района съёмки на расстояние не более 40 км, путем определения с помощью приемников СРНС начальной, промежуточных и конечных точек двух взаимно перпендикулярных магистралей, а также вершин квадратов как пунктов АС, с использованием относительного метода измерений путем установки базового приемника на береговом пункте геодезической сети.
207
в) при отсутствии пункта геодезической сети, удаленного от района съёмки на расстояние не более 40 км, путем определения координат начальной, промежуточных и конечных точек магистралей, а также вершин квадратов, как пунктов АС с помощью приемников СРНС абсолютным методом.
Последующая разбивка площади съемки на сеть квадратов, измерение глубин и определение их положения производятся по такой же технологии, как и при съемке в гавани с учетом требуемой дискретности. При этом итоговая погрешность (Р=95%) определения положения измеренной глубины с учетом погрешности определения положения пункта АС и погрешности линейно-угловой засечки должна быть не более допустимой погрешности глубины, предусмотренной требованиями статьи 1.1.8 настоящих Правил для требуемого класса съемки. В случае не выполнения данного требования выполнение съемки следует считать экономически нецелесообразным.
208
Приложение 29
к ст. 6.2.3.
Вычисление геодезических координат точек положения преобразователя эхолота (при использовании автоматизированных систем)
При съемке однолучевым эхолотом положение преобразователя эхолота (ПЭ) определяет положение измеренной глубины, если смещение точки зондирования дна вследствие бортовой и килевой качек менее допустимой погрешности положения глубины, предусмотренной ст. 1.13. В противном случае положение измеренной глубины необходимо определять с учетом наклона зондирующего луча.
Задача определения положения ПЭ решается с учетом того, что излучение и прием гидроакустического сигнала происходит в одной точке, связанной с положением ПЭ в судовой системе координат (ССК). Это в равной степени относится и для МАЭ и для МЛЭ.
Координаты ПЭ в ССК должны быть определены при монтаже ПЭ и записаны в технический паспорт (формуляр) эхолота.
Таким образом, координаты ПЭ в ССК x, y, z должны быть взяты из технического паспорта прибора.
Положение ПЭ в правой геодезической системе координат (ГСК) на момент времени t определим вектором-столбцом состояния {XГ ,YГ ,ZГ , ,R,P}Tt , где Xг, Yг - геодезические прямоугольные координаты в горизонтальной плоскости;
Zг - геодезическая высота относительного принятого эллипсоида;
α - дирекционный угол (курс – минус плоское сближение меридианов); R, P - угол крена и дифферента;
T - знак транспонирования;
Координаты ПЭ в левой геодезической системе вычисляют по формулам
XГ |
y Xобс; |
|
YГ |
x Yобс; |
(1) |
ZГ |
z Zобс, |
|
где x , y ,z - составляющие вектора положения ПЭ в горизонтной системе координат, соответствующей ССК, повернутой на отрицательные значения дирекционного угла, крена и дифферента на момент t с началом в центре радиоприема антенны приемника СРНС;
Xобс, Yобс, Zобс – прямоугольные геодезические координаты центра радиоприема антенны приемника РНС, получаемые при обсервации и приведенные на момент t.
Составляющие вектора положения ПЭ в горизонтной системе координатx , y ,z вычисляются по формуле
209
где hвк - величина вертикальной качки, выдаваемая датчиком качки на момент измерения глубины;
x, y, z - разность координат точки установки ПЭ и датчика вертикальной качки.
Реально α, R, P изменяются с течением времени. Можно считать, что их изменение равномерно и угловые скорости соответственно равны ,R,P.
Аналогично с течением времени изменяется Xобс, Yобс, Zобс.
Угловые скорости изменения курса и углов бортовой и килевой качек вычисляется по формулам
|
2 |
1 |
(7) |
||||
|
R2 |
t |
|||||
|
|
||||||
R |
R1 |
|
|
||||
|
|
t |
|
||||
P |
P2 |
P1 |
|
|
|||
|
t |
|
|||||
|
|
|
|
|
|||
где 1, 2,R1,R2,P1,P2 - значения параметров, измеренные в моменты t1,t2 ;
t t2 t1 .
Аналогично скорость изменения обсервованных координат вычисляют по формулам
|
|
|
|
|
X |
|
|
|
Xобс |
2 |
Xобс |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
; |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
(8) |
|||
|
|
|
|
|
Y |
Yобс2 |
Yобс1 |
; |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
Zобс |
2 |
Zобс |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
, |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Xобс , X |
обс |
,Yобс |
,Yобс |
,Zобс |
,Zобс |
- |
|
|
координаты центра |
радиоприема антенны |
|||||||||||||||
1 |
2 |
1 |
2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
РНС на моменты t1,t2 обсерваций по СРНС. |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t t2 t1 . |
|
|||||||||
Значения углов ,R,P и координат |
|
|
Xобс,Yобс,Zобс на момент t3 находим по |
||||||||||||||||||||||
формулам |
|
|
|
|
t |
t |
|
|
|
|
|
|
t2 ); |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
2 |
|
(t3 |
(9) |
|||||||||||||||||
|
|
|
|
|
R |
3 |
R |
|
|
R(t |
|
|
t |
|
|
); |
|||||||||
|
|
|
|
|
|
|
|
|
3 |
2 |
|||||||||||||||
|
|
|
|
|
t |
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P P P(t t |
|
); |
|
|||||||||||||||||
|
|
|
|
|
t |
|
|
|
t |
2 |
|
|
3 |
2 |
|
|
|
||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Xt |
Xобс |
|
|
X(t3 t2); |
(10) |
|||||||||||||||
|
|
|
|
|
3 |
|
|
|
|
|
|
t |
2 |
Y(t |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Y |
Y |
|
|
|
3 |
|
t |
|
); |
|||||||||||
|
|
|
|
|
t |
|
|
|
|
обс |
|
|
|
|
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
3 |
|
|
|
|
|
|
t2 |
|
Z(t3 t2). |
|
||||||||||
|
|
|
|
|
Zt |
Zобс |
|
|
|
||||||||||||||||
|
|
|
|
|
3 |
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
|
|
|
|
|
||
Полученные по формулам (9) значения необходимо подставить в уравнения (5), а затем к вычисленному значению z добавить поправку, вычисленную по формуле (6). Затем полученные величины и величины, полученные по формулам (10) необходимо подставить в уравнение (1). Полученные, по формулам значения будут определять положение ПЭ в левой геодезической координатной системе отсчета.
211