1.2 Классификация аср
1 По назначению (по характеру изменения задания):
стабилизирующая АСР - система, алгоритм функционирования которой содержит предписание поддерживать регулируемую величину на постоянном значении (x = const);
программная АСР - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в соответствии с заранее заданной функцией (x изменяется программно, например, как функция времени);
следящая АСР - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в зависимости от заранее неизвестной величины на входе АСР (x изменяется произвольно).
2 По количеству контуров:
одноконтурные - содержащие один контур регулирования (одну обратную связь по регулируемому параметру),
многоконтурные - содержащие несколько контуров регулирования (несколько обратных связей, например, по нескольким параметрам, по скорости/ускорению изменения параметра и т.д.).
3 По числу регулируемых величин:
одномерные - системы с 1 регулируемой величиной,
многомерные - системы с несколькими регулируемыми величинами.
Многомерные АСР в свою очередь подразделяются на системы:
а) несвязанного регулирования, в которых регуляторы непосредственно не связаны и могут взаимодействовать только через общий для них объект управления;
б) связанного регулирования, в которых регуляторы различных параметров одного и того же технологического процесса связаны между собой вне объекта регулирования.
4 По функциональному назначению:
АСР температуры, давления, расхода, уровня, напряжения и т.д.
5 По характеру используемых для управления сигналов:
непрерывные,
дискретные (релейные, импульсные, цифровые).
6 По характеру математических соотношений:
линейные, для которых справедлив принцип суперпозиции;
нелинейные.
Примечание - Если на вход объекта подается несколько входных воздействий, то реакция объекта на сумму входных воздействий равна сумме реакций объекта на каждое воздействие в отдельности:
 (х1
+ х2)
= (х1)
+ (х2),
(х1
+ х2)
= (х1)
+ (х2),
где - линейная функция (интегрирование, дифференцирование и т.д.).
Данный принцип называется принципом суперпозиции (наложения).
7 По виду используемой для регулирования энергии:
пневматические,
гидравлические,
электрические,
механические и др.
8 По наличию внутреннего источника энергии
системы прямого действия,
системы с вспомогательным источником энергии.
9 По принципу регулирования:
по отклонению:
П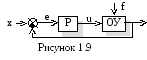 одавляющее
большинство систем построено по принципу
обратной связи - регулирования по
отклонению (см. рисунок 1.9). Принцип
действия такой системы рассмотрен
выше.
одавляющее
большинство систем построено по принципу
обратной связи - регулирования по
отклонению (см. рисунок 1.9). Принцип
действия такой системы рассмотрен
выше.
по возмущению.
Д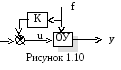 анные
системы могут быть использованы в том
случае, если есть возможность измерения
возмущающего воздействия (см. рисунок
1.10).
анные
системы могут быть использованы в том
случае, если есть возможность измерения
возмущающего воздействия (см. рисунок
1.10).
На схеме обозначено К - корректирующее звено.
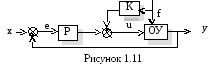
комбинированные - сочетают в себе особенности предыдущих АСР.
Данный способ (см. рисунок 1.11) достигает высокого качества управления, поскольку здесь идет коррекция управляющего воздействия не только по величине ошибки, но и по возмущающему воздействию, однако применение данного способа регулирования ограничено тем, что возмущающее воздействие f не всегда возможно измерить.