

Вопрос 4. Евклидово пространство.
Введем в пространстве R метрику, т.е. операции нахождения длины вектора и угла между векторами.
Для
этого определим операцию скалярного
произведения векторов
 и
и
 .
.
Если
 = (
= ( ,
, ,
…,
,
…, ),
), = (
= ( ,
, ,
…,
,
…, ),
то
),
то ·
· =
= +
+ + … + +
+ … + + .
Обозначается следующим образом:
.
Обозначается следующим образом:
 ·
·
 = (
= ( ,
, ).
).
Следовательно,
 ·
· = (
= ( ,
, )
) │
│ │2
=
│2
=
 +
+ + … +
+ … + ,
,
т. е.
│ │=
│=
 ‒ длина (норма) вектора.
‒ длина (норма) вектора.
Обозначим
= ( ,
, ).
).
Тогда

Линейное векторное пространство Rназывается евклидовым, если в нем задана метрика.
Вопрос 5. Ортогональный и ортонормированный базис.
Система векторов e1, е2, …, еn называется ортогональной, если (еi ,еj) = 0 при i j, и нормированной, если │еi│ = 1 для всех i = 1, 2,..., n.
Если векторы системы ортогональны и нормированы, они называются ортонормированными.
Пример. Чтобы нормировать ненулевой вектор, необходимо разделить его на норму.
Пусть задан вектор x = (1, –1, 2, 0).
Его
норма |x|
=
 .
Нормированный вектор имеет вид
.
Нормированный вектор имеет вид
 .
Его длина │е│=
1.
.
Его длина │е│=
1.
Теорема 1. Ортонормированная система векторов линейно независима.
Теорема 2. Во всяком n‒ мерном евклидовом пространстве существует ортонормированный базис.
Вопрос 6. Переход к новому базису.
Пусть
в пространстве R
заданы два базиса: старый
 ,
, ,
… ,
,
… , и новый
и новый ,
, ,
… ,
,
… , .
.
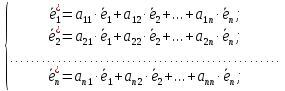
Выразим связь между базисами, разложив векторы нового базиса по векторам старого базиса:
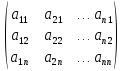
Связь
между базисами задается матрицей
 ,
записанной в транспонированном виде:
,
записанной в транспонированном виде:
А
=
Координаты
вектора в новом базисе находятся с
помощью обратной матрицы
 .
.
где
 – матрица перехода от старого базиса
к новому;
– матрица перехода от старого базиса
к новому;
Пример.
|
Дано |
Решение |
|
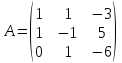
В
базисе
|
1)
Докажем, что векторы
т. е. образуют базис. Для этого составим их линейную комбинацию и приравняем ее к нулевому вектору.
Получим: |
|
Доказать,
что векторы
| |
|
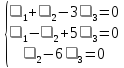
Следовательно, получим однородную систему:
∆ =
Следовательно,система
имеет единственное решение
2) Разложим векторы нового базиса по векторам старого базиса.
Координаты
вектора
Ã=
| |
 (1;
1; 0),
(1;
1; 0),  (1;
–1; 1),
(1;
–1; 1), (–3;
5; –6),
(–3;
5; –6), (4;
–4; 5).
(4;
–4; 5). ,
,
 ,
, .
. и
и
 являются линейно независимыми,
являются линейно независимыми, ·
·
 +
+ ·
· +
+ =
=
 .
. и
и
 сами образуют базис и найти координаты
вектора
сами образуют базис и найти координаты
вектора в этом базисе.
в этом базисе.
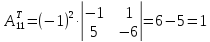
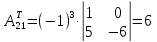
 = 6–
3 + 0 –
0 –
5 + 6 = 4
0
= 6–
3 + 0 –
0 –
5 + 6 = 4
0  и
и –
линейно независимые, т. е. образуют
базис.
–
линейно независимые, т. е. образуют
базис.
 .
. .
. ;
;

 ;
; ;
; ;
; ;
; ;
; ;
; ;
; ;
; ;
;

Лекция № 11
Вопрос 1. Линейные операторы.
Рассмотрим
два линейных векторных пространства:
 – размерности
– размерности
 и
и – размерности
– размерности .
.
Определение.
Если задан закон или правило, по которому
каждому вектору
 пространства
пространства ставится в соответствие единственный
вектор ȳ пространства
ставится в соответствие единственный
вектор ȳ пространства ,
то говорят, что задан оператор (отображение)
как функция
,
то говорят, что задан оператор (отображение)
как функция пространства
пространства в пространство
в пространство ,
т.е.
,
т.е. .
.
Вектор
 – прообраз вектора
– прообраз вектора ,
вектор
,
вектор – образ
– образ при этом отображении.
при этом отображении.
Оператор
 называетсялинейным,
если выполняются следующие два условия:
называетсялинейным,
если выполняются следующие два условия:
1.
 (
( +
+ )
=
)
= (
( )
+
)
+ (
( )
– аддитивность;
)
– аддитивность;
2.
 (·
(· )
=·
)
=· (
( )
– однородность.
)
– однородность.
Равенство
 можно
представить в виде матричного уравнения:
можно
представить в виде матричного уравнения:
Y = A · X,
где
A
– матрица линейного оператора
 .
В координатном виде получим:
.
В координатном виде получим: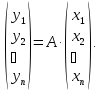
Зависимость
между матрицами
 одного и того же оператора
одного и того же оператора в разных базисах задается формулой:
в разных базисах задается формулой:
 =
=
 ·
· ,
,
где
 – матрица перехода от старого базиса
к новому.
– матрица перехода от старого базиса
к новому.
Пример:
Линейный
оператор
 задан матрицей:
задан матрицей:
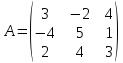 ;
;
 ;
;
Найти:

Решение:
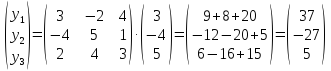 ;
;
 .
.