

Зубенко, Омельчук - Програмування. Поглиблений курс
.pdfРозділ І. ЛОГІКО-АЛГЕБРИЧНІ УНІВЕРСАЛІЇ
Якщо (a,b) R , то кажуть, що елемент a перебуває у відношенні R з елементом b . Цей факт також записують aRb . Образом елемента a
за відповідності R |
називається сукупність R (a ) ={b B : (a,b) R}. |
R визначено на a , |
якщо образ R (a ) ≠ . У протилежному випадку R |
не визначено на a . |
Образ підмножини X A за відповідності R ви- |
значається як R (X ) = R(x) . Прообразом елемента b за відповідно-
x X
сті R називається сукупність R−1 (b)={a A : (a,b) R}. Прообраз під- множини Y B за відповідності R визначається як
R−1 (Y )= R−1(y) . З відношеннями як множинами можна виконува-
y Y
ти всі згадувані теоретико-множинні операції. Однак існують і спе- цифічні операції. Оберненням відношення R A B називається від-
ношення R−1 ={(b,a ): b B & a A & aRb}. За означенням R−1 B A .
Добутком відношень P A B та Q B C називається відношення
def
P oQ = {(a,c ): b B (a A & c C & aPb & bQc )}.
За означенням P oQ A C . Сама операція o називається множен- ням відношень. Наведемо важливі властивості операції множення:
(P oQ )oR = P o(Q oR ) – асоціативність; R oiB = iA oR = R – діагональ;
(P oQ )−1 = (Q−1 oP −1 ) – обернення добутку.
def
Rn = R o...oR називається n -м степенем відношення R .
1442443
n
Нехай є скороченням фрази "тоді й тільки тоді". Довільне від- ношення R на множині A називається:
1) рефлексивним x A xRx iA R ;
2) симетричним x,y A (xRy → yRx ) R−1 = R ;
3)транзитивним x,y,z A (xRy & yRz → xRz ) RR R ;
4)антисиметричним x,y A (xRy & yRx → x = y) R−1 ∩R I .
Із транзитивністю пов'язане таке важливе поняття, як транзити- вне замикання. Транзитивним замиканням відношення R A A
41

ПРОГРАМУВАННЯ
називається найменше транзитивне відношення R∞ A A , що мі- стить R . Має місце
Лема 1.1. 1) R∞ = U∞ Ri ; 2) R∞ збігається з перетином усіх транзи-
i =1
тивних надвідношень R .
|
∞ |
|
Доведення. Дійсно, U Ri містить R і є транзитивним, оскільки як- |
||
|
i =1 |
|
що (a,b) Rn та |
(b,c ) Rm , то |
(a,c ) Rn +m . Будь-яке транзитивне |
надвідношення R |
має містити |
Rn . Це легко довести за індукцією |
∞
(див. вправу 22). Отже, Ri – найменше транзитивне надвідношен-
i =1
ня R . Далі, перетин усіх транзитивних надвідношень R є транзитив- ним, а враховуючи, що в даному перетині бере участь і найменше з транзитивних надвідношень R , перетин збігається з ним ■
Наприклад, для R ={(n,n +1): n N } транзитивне замикання R∞ збігається зі стандартним числовим порядком <.
1.2.5. ЕКВІВАЛЕНТНОСТІ Й ПОРЯДКИ
Довільні відношення R на множині A називаються:
1) частковим порядком, якщо R є рефлексивним, транзитивним і антисиметричним;
2) лінійним порядком, коли R є частковим порядком таким,
що x,y A (xRy yRx );
3) еквівалентністю, якщо R є рефлексивним, транзитивним і си- метричним.
Частково впорядковану множину будемо називати чумом, або ґра- тами, а її порядок позначати p . Якщо a p b , то кажуть, що елемент a менший ніж b , а елемент b більший ніж a . Якщо при цьому a ≠ b , то кажуть, що a строго менший ніж b , а b – строго більший ніж a .
Елемент a0 чуму А називається найбільшим (найменшим), якщоa A(a p a0 )( a A(a0 p a)). Найбільший і найменший елементи чуму
називаються його одиницею (1) та нулем (0). Елемент a0 |
чуму A нази- |
||
вається |
максимальним |
(мінімальним), |
якщо |
a A←(a0 p a ) a A←(a p a0 ). Отже, довільний елемент a A або не- порівнянний із максимальним елементом a0 , або менший за нього. Вер-
42
Розділ І. ЛОГІКО-АЛГЕБРИЧНІ УНІВЕРСАЛІЇ
хнім (нижнім) конусом підмножини B A називається сукупність усіх таких елементів a A , що b B(b p a) ( b B(a p b) ). Найменший
(найбільший) елемент верхнього (нижнього) конуса підмножини B на- зивається її верхньою (нижньою) гранню й позначається supB ( inf B ).
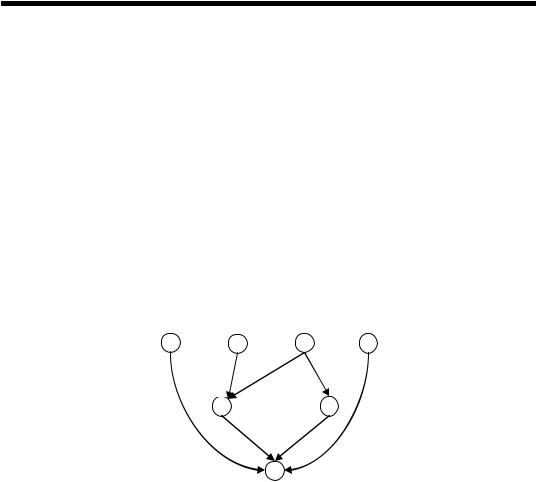
Чум можна подавати графічно за допомогою діаграм Гессе. У діаг- рамі Гессе елемент y більший за елемент x , якщо в ній існує шлях
від y до x за стрілками, напрямленими вниз. З урахуванням транзи-
тивності не має сенсу зображати всі стрілки між елементами. Розглянемо приклад чуму й діаграму Гессе для нього. Приклад 1.7. Діаграма Гессе.
Нехай множина A = {1,2,3,4,5,6,7}, а відношення порядку x p y означає y % x = 0 , тобто y ділиться на x без залишку. Тут A – рефлек-
сивний чум, але він не є лінійно впорядкованим (прості числа 3 і 5 непорівнянні).
Діаграма Гессе для чуму A має вигляд:
5 |
4 |
6 |
7 |
|
2 |
|
3 |
|
|
1 |
|
Тут 1 – найменший елемент в A ; 4, 5, 6 i 7 – максимальні. Найбі- льшого елемента в чумі A немає. Верхня грань sup(2, 3)= 6 , нижня –
inf (2, 3)=1, а верхньої грані sup(2, 5) не існує ■
Довільний чум A називається індуктивним, якщо будь-який його зростаючий ланцюг a1 p a2 p ...an p ... має найменшу верхню грань
∞ |
|
|
|
a = ai . Відображення f : A → A називається монотонним, якщо для |
|||
i =1 |
|
з умови x p y |
випливає f (x )p f (y), і неперервним, як- |
всіх x,y Df |
|||
що |
для |
будь-якого |
ланцюга елементів a1 p a2 p ...an p ... |
∞ |
∞ |
|
|
f ( ai |
) = f (ai ). З неперервності відображення випливає його моно- |
||
i =1 |
i =1 |
|
|
43
ПРОГРАМУВАННЯ
тонність (див. вправу 25). Найменший елемент в А (якщо він існує)
називається його нулем. Елемент a |
|
називається нерухомою точкою |
||||||||||||||||||||||||
відображення f |
|
: A → A , якщо f (a) =a . Має місце |
|
|
|
|
|
|
|
|||||||||||||||||
|
Теорема 1.1 (про нерухому точку). Нехай A – індуктивний чум |
|||||||||||||||||||||||||
із |
нулем |
ε , |
а |
|
|
f : A → A |
– неперервне |
відображення. Тоді |
елемент |
|||||||||||||||||
a0 |
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= f i (ε) – найменша нерухома точка відображення f . |
|
|
|
|
||||||||||||||||||||||
|
i =0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
∞ |
|
∞ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
f (a0 ) = |
|
|
|
|
|
|
||||||||
|
Доведення. |
|
За |
означенням |
f i +1(ε) |
= f i (ε)= |
f i (ε) = a0 . |
|||||||||||||||||||
Отже, |
a0 |
є нерухомою точкою f |
|
|
|
|
|
i =0 |
|
i =1 |
|
i =0 |
|
|
|
|||||||||||
. Те, |
що вона найменша, |
випливає з |
||||||||||||||||||||||||
монотонності f |
|
(див. вправу 26) ■ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Аналогічна теорема (про нерухому точку) має місце і для n -арних |
|||||||||||||||||||||||||
неперервних |
|
|
|
|
відображень |
|
|
|
f : An → A |
|
|
таких, |
що |
|||||||||||||
f (x1,...,xn ) = (f1(x1,...,xn ),..., fn (x1,...,xn )), де відображення |
fi |
непере- |
||||||||||||||||||||||||
рвні, |
а |
порядок |
|
на |
векторах |
|
визначається |
|
покомпонентно: |
|||||||||||||||||
(a1,...,an ) p (a1′,...,an′ |
) a1 p a1′,...,an p an′ |
. Найменшою нерухомою точ- |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
|
|
|
∞ |
|
|
|
|
кою відображення |
|
f |
|
|
|
= ( f1(k )(ε,...,ε),..., fn(k )(ε,...,ε)), |
||||||||||||||||||||
|
буде вектор a |
0 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(k +1)(x ,...,x |
|
|
|
|
k = |
0 |
|
|
|
k = |
0 |
|
|
|
|
де |
f |
(0)(x ,...,x |
n |
) = x |
, |
f |
n |
) = f |
(f |
(k )(x ,...,x |
n |
),..., f |
(k )(x ,...,x |
n |
)) |
|||||||||||
|
i |
1 |
|
|
i |
|
i |
1 |
|
|
|
i |
1 |
1 |
|
n |
1 |
|
||||||||
для i =1,n (див. вправу 28).
Теореми про нерухому точку використовуються при дослідженні й розв'язанні рівнянь і систем рівнянь у різних алгебрах, у тому числі в алгебрах відношень, мов слів тощо.
Чум, в якому для кожних двох елементів існують верхня й нижня грані, називається структурою. Структура називається повною (буле- вою алгеброю), якщо верхня й нижня грані існують для будь-якої її під- множини. Прикладами повної структури є булеві алгебри: а) істиннісних значень {0,1} з операціями диз'юнкції та кон'юнкції (взяття верхньої й
нижньої граней sup та inf , відповідно); б) множини, яку ми розглянули
вище. В останньому прикладі нижню й верхню грані двох і довільної кі- лькості множин задають операції перетину й об'єднання. Не випадково
в літературі часто для довільних чумів терми sup(a,b) та inf (a,b) запи-
сують відповідно a b та a ∩b . Для повних структур виконуються всі закони булевої алгебри множин (див. вправу 24).
Фактор-класами еквівалентності R на A називаються сукупності еквівалентних між собою елементів A . Клас еквівалентності, якому
44
Розділ І. ЛОГІКО-АЛГЕБРИЧНІ УНІВЕРСАЛІЇ
належить елемент a , позначається [a]R , або просто [a], для фіксованого R . Сукупність A/R = {[a] : a A} називається фактор-
множиною множини A , а її потужність – індексом R . Процес переходу від довільної множини до її фактор-множини називається факторизацією й відіграє надзвичайно важливу роль у процесах інформаційного моделювання систем.
* Література для CР: множини й відношення – [2, 66, 95, 97, 105, 123]; теорія нерухомої точки – [14, 52, 82, 118, 148].
Контрольні запитання та вправи
1.Дати означення множини.
2.Що таке характеристична й частково характеристична функції?
3.Сформулювати закони булевої алгебри множин.
4.Довести за допомогою діаграм Ейлера – Венна закони 3)–7) булевої алгебри.
5.Довести за допомогою діаграм Ейлера – Венна, що такі три
твердження попарно еквівалентні: а) A B ; б) A ∩ B = A ;
в) A B = B .
6. Спростити вирази:
а) A ∩ B B ;
б) (A ∩ B ∩C ∩ X ) (A ∩C) (B ∩C ) (C ∩ X ),
в)(A ∩ B ∩ X ) (A ∩ B ∩C ∩ X ∩Y ) (A ∩ X ∩ X ) .
7 ** . Нехай A – певна множина. Рівнянням у булевій алгебрі множин B (A)= {2A ; ,∩,\, , } з одним невідомим X називається формула R(A1,...,An ,X ) = (*), де вираз у лівій частині – Ω2 -терм булевої алгебри множин, побудований за допомогою символів операцій алгебри з констант-підмножин A1,...,An A і невідомого X . Наприклад, B C ∩ X = .
З'ясувати, за яких умов рівняння (*) має розв'язок і знайти всі його розв'язки [123].
8.Що таке індексована множина?
9.У чому полягає різниця між сильним і слабким індексуванням?
10.Дати визначення прямої суми множин.
11.Навести приклади застосувань слабкого й сильного індексувань.
12.Чим відрізняються: а) послідовності від підпослідовностей і кортежів; б) кортежі від векторів?
13.Що таке відображення?
45
ПРОГРАМУВАННЯ
14.У чому полягає різниця між відображенням і відповідністю? Проілюструвати прикладами.
15.Яке відношення називається: а) рефлективним; б) симетричним; в) транзитивним; г) антисиметричним; д) частковим порядком; е) лінійним порядком; є) еквівалентністю; ж) структурою, повною структурою? Навести відповідні приклади.
16.Дати означення монотонного й неперервного відображень. Навести відповідні приклади.
17.Що таке нерухома точка відображення?
18.Що таке фактор-множина та індекс еквівалентності?
19.Що таке факторизація множини?
20.Визначимо відношення на словах: u v , якщо слово u є префіксом слова v . Чи буде це відношення: еквівалентністю, лінійним або частковим порядком, структурою на множині всіх слів X * у алфавіті X ?
21.Чи буде сукупність{a,aab,aa,bb,bbc,ab,bbb,d; } чумом?
Якщо так, то побудувати відповідну діаграму Гессе.
22.Нехай R – довільне бінарне відношення. Довести, що будь- яке транзитивне надвідношення R містить Rn , n ≥ 0 .
23.Показати, що булева алгебра множин є повною структурою відносно включення.
24.Довести закони 1)-7) булевої алгебри множин для: а) алгебри істиннісних значень з операціями кон'юнкції та диз'юнкції й запереченням; б) довільної повної структури з нулем і одиницею, доповнення a елемента a в якій визначається системою рівностей a ∩a = 0 та a a =1.
25 * . Показати, що з неперервності відображення випливає його монотонність.
26 * . Показати, що нерухома точка a0 з доведення теореми 1.1 є найменшою. Скористатися монотонністю відображення f .
27.Нехай A – індуктивний чум із нулем ε . Показати, що декар- товий степінь An є індуктивним чумом із нулем (ε,...,ε).
28 * . Довести теорему про нерухому точку для n -арних непере- рвних відображень.
46

Розділ І. ЛОГІКО-АЛГЕБРИЧНІ УНІВЕРСАЛІЇ
1.3. Функції як обчислювальні процедури
¾Функціїпроцедури
¾Традиційні способи специфікації функцій
¾Алгебричні специфікації
¾Функції як обчислювальні процедури
Ключові слова: функція-процедура, сюр'єкція, ін'єкція, бієкція, графік функції, композиція рангу 1, композиції множення, розгалуження, обхід, ітерація, повторен- ня, недетермінований вибір, детермінований вибір, регулярна функція, перестанов- ка, ототожнення й параметризація аргументів, введення фіктивних аргументів, підстановка (суперпозиція), ітерації, повторення, регулярна n -арна операція, обчис- лювальний простір, обчислювальна процедура, функція керування, обчислення за процедурою, функція як обчислювальна процедура.
Поняття функції належить до найважливіших понять інформатики. Відомі два різні тлумачення даного поняття: процедурне16 й теоретико-множинне. У першому випадку функція (від лат. functio – виконання, звершення) розглядається як спосіб для отримання певного результату за аргументами, у другому – як синонім теоретико-множинного відображення.
Ці два терміни ввійшли в математичну практику не випадково. Вони мають принципово різний смисловий відтінок. Коли говорять про певне відображення f , то цікавляться тільки тим, чи є пара
(a,b) елементом підмножини |
f A B , |
тобто чи існує відповідний |
зв'язок між елементами a A |
та b B |
(екстенсіональний підхід). |
Питання про природу цього зв'язку, яким чином він забезпечується, вважається непринциповим. У випадку ж функції-процедури f її
теж розглядають як можливість поставити у відповідність елементам множини A певні елементи множини B , але на перший план виходить спосіб реалізації такого зіставлення при визначенні f
(інтенсіональний підхід).
Процедурний підхід сформувався історично першим (термін запровадив Г. Лейбніц). Однак він був майже витіснений теоретико- множинним на початку ХХ ст. у зв'язку з тотальним переходом
16 Процедура – офіційно встановлений чи узвичайнений порядок здійснення чого- небудь, низка певних цілеспрямованих дій.
47

ПРОГРАМУВАННЯ
математики на нову основу. Достатньо послатись на самі назви сучасних класичних математичних дисциплін – функціональний аналіз, теорія функцій комплексних змінних тощо. Сьогодні процедурний підхід поступово повертає свої позиції завдяки бурхливому розвитку конструктивної математики та інформатики. Поняття функції-процедури є центральним у теорії алгоритмів і програмології, мовах програмування тощо.
Даний підрозділ присвячено функціям як процедурам. Ключовими будуть засоби подання таких функцій.
1.3.1. ФУНКЦІЇ-ПРОЦЕДУРИ
Нехай U – довільна множина.
Функція f – це процедура, яка може бути застосована до одного або кі-
лькох елементів (аргументів) множини U з метою знаходження інших елементів (результату) з U . Застосування функції полягає у проведенні обчислення
– послідовності дій, яке завершується побудовою результату функції.
При цьому функція не завжди гарантує однозначність і навіть іс- нування результату. Це означає, що застосування функції до аргуме- нтів може не привести до результату, а застосування функції повтор- но до тих самих аргументів може приводити до іншого результату. У цьому сенсі всі функції розподіляються на детерміновані й недете- рміновані. Перші гарантують однозначність своїх результатів, усі ре- шта належать до других.
Увага! Надалі нас будуть цікавити в основному детерміновані фу- нкції. Випадки, коли це не так, будуть спеціально зазначатись ►
Існує тісний взаємозв'язок між функціями й алгоритмами. Можна розглядати загальне поняття – функцію та його конкретизацію – алго- ритм. Будь-який алгоритм є функцією-процедурою, а чи буде остання алгоритмом, залежить від способу її визначення. Це обговорювати- меться детально в підрозд. 2.1.4.
Терми f (x ), fx та xf використовуються для запису результату за- стосування функції f до аргументу x . Ураховуючи, що результат та- кого застосування за означенням може бути відсутній, будемо дода- вати до вказаних термів праворуч символ ↓, якщо даний результат
гарантовано існує. З кожною функцією |
f пов'язані дві області – ви- |
значення Df = {x U : f (x) ↓} і значень |
E f = {y U : y = f (x)& x Df } . |
Щоб показати цей зв'язок, функцію f подають у вигляді f : Df → E f
48

Розділ І. ЛОГІКО-АЛГЕБРИЧНІ УНІВЕРСАЛІЇ
і називають усюди визначеною на Df . На практиці буває простіше
описати не самі області визначення та значень даної функції, а певні їхні надмножини, наприклад T і R . Щоб підкреслити, що функція f
розглядається над цими загальнішими областями, її записують як f : Т→R і називають частковою, а пару (T ,R ) – типом функції. Будемо вважати вираз f (x ) беззмістовним (тобто рівним # ) для всіх аргуме- нтів поза областю визначеності функції. Графіком функції f назива-
ється відповідність Γf між множинами Df |
і |
E f , що складається з |
усіх можливих пар вигляду (x, fx ), тобто Γf |
= |
{(x, fx ): x Df }. Графі- |
ки функцій використовуються для їх екстенсіонального опису. Функ-
ції f : A → B та g : C → D називаються еквівалентними (f |
g ), якщо |
||
x A C fx = gx (*). Наприклад, функції |
f0 : N → N та |
f : N → N , |
|
def |
|
def |
|
що визначаються термами f0x = x / x та |
fx = 1, нееквівалентні. Їх |
||
розмежовує точка x = 0 . Дійсно, f0 0 = # , |
а |
f 0 =1. Якщо область ви- |
|
значення Dg функції g є надмножиною області визначення Df фун- кції f (Df Dg ) і виконується умова x Df (fx = gx ), то кажуть, що функція g є еквівалентним накриттям f , або просто накриттям f . В останньому прикладі f є накриттям f0 . Еквівалентні функції
називаються рівними, якщо їхні типи збігаються. Усюди визначена функція f : A → B називається:
1)однозначною (ін'єкцією) x,y A (fx = fy → x = y) ;
2)сюр'єкцією y B x A y = fx ;
3)взаємооднозначною (бієкцією), якщо вона є ін'єкцією та сюр'єкцією.
1.3.2. ТРАДИЦІЙНІ СПОСОБИ СПЕЦИФІКАЦІЇ ФУНКЦІЙ
У програмуванні означення (дескрипції) функцій називають спе- цифікаціями. Розрізняють теоретико-множинні та процедурні специ- фікації. Перші пов'язані з описом графіків функцій, а другі – безпосе- редньо з описом процедур. Зазвичай з опису графіка функції не ви- пливає її специфікація як процедури. Не завжди за ним, наприклад, можна практично віднайти значення функції на тому чи іншому ар- гументі чи зробити це ефективно. Однак наявність такого опису є важливою передумовою для подальшого уточнення функції, тому ро-
49

ПРОГРАМУВАННЯ
зробник інформаційних систем повинен володіти обома способами специфікації – як теоретико-множинним, так і процедурним.
Оскільки графіки детермінованих функцій є відображеннями, то для їхньої специфікації можна використовувати загальні способи специфікації останніх.
Позначатимемо відображення малими грецькими літерами α,β,γ,K. За означенням образ відображення α(x ) завжди є одноелементним,
тому будемо ототожнювати його із цим елементом, а сам елемент на- зивати значенням відображення α на x і позначати, як і у випадку
функцій, αx та |
xα . Продовжуючи аналогію з функціями, відобра- |
ження α A ×B |
також будемо записувати як α : A → B і говорити |
про області визначення й значення відображення, а також про ін'єк- тивні, сюр'єктивні та бієктивні відображення. Перші два ще назива-
ють відображеннями в та відображеннями на, відповідно.
Розпочнемо розгляд зі словесного (нематематичного ) способу по- дання відображень. Він може вважатися найбільш універсальним і полягає в тому, що зв'язок між аргументами й результатами відобра- ження формулюється в термінах природної мови. Словесні специфі- кації використовуються насамперед на етапах аналізу вхідних сис- тем, обміну проміжними результатами та інформацією в процесі ро- боти над проектами тощо. Однак за всієї зручності вони мають і сут- тєві недоліки. Існує небезпека неповноти, нечіткості й неоднозначно- сті таких специфікацій. До того ж виникають серйозні проблеми при спробі їхньої процедуризації, тобто при намаганні перейти від слове- сно поданого відображення до еквівалентної йому функції, особливо при автоматизації цих процесів.
Одним із найпростіших і найуживаніших на практиці способів по- дання відображень є табличний. Нехай область визначення відобра-
ження α скінченна й має вигляд Dα = {x1,x2,Kxn }, а Eα = {y1,y2,Kyn },
yi = αxi |
– область значень |
α . Тоді відображення |
α |
можна задати у |
||||||||||
вигляді таблиць: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1x2...xn |
|
|
x |
|
x |
2 |
|
… |
|
|
x |
n |
|
|
|
|
|
|
|
|
|||||||||
|
|
або |
|
1 |
|
|
|
|
|
|
|
|
||
|
y |
|
y |
|
|
… |
|
|
y |
|
|
|||
y1y2....yn |
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
1 |
|
|
|
|
|
|
n |
|
||
Лише раз створивши й запам'ятавши таку таблицю, далі можна вже не обчислювати значення відображення, а його результати брати безпо- середньо з таблиці. Таким чином, маємо випадок, коли теоретико- множинне подання прямо входить до специфікації відповідної функції. Воно дуже зручне при проведенні обчислень, зокрема без використання
50