

2. Однородные линейные дифференциальные уравнения с частными производными и свойства их решений. Если в уравнении (7) правая часть равна нулю, то уравнение называется однородным. Оно имеет вид
 (8)
(8)
Вообще в теории
дифференциальных уравнений уравнение
называется однородным, если функция,
тождественно равная нулю (![]() )
, является его решением. Решения линейных
однородных уравнений вида (8) обладают
следующим свойством:
)
, является его решением. Решения линейных
однородных уравнений вида (8) обладают
следующим свойством:
Если каждая из
функций
![]() является
решением уравнения
(8), то и их
линейная комбинация
является
решением уравнения
(8), то и их
линейная комбинация
![]() (9)
(9)
где
![]() —
произвольные постоянные, также
является
решением этого уравнения.
—
произвольные постоянные, также
является
решением этого уравнения.
Для доказательства достаточно заметить, что если и есть линейная комбинация частных решений:
![]()
(для краткости
аргументы функций не пишутся), то любая
производная функции
и будет такой
же линейной комбинацией соответствующих
производных функций
![]()

Разумеется, так же будут выглядеть и производные второго порядка. Если подставить выражения для производных функций в левую часть уравнения (8) и перегруппировать слагаемые, то получим

Поскольку по условию
функции
![]() являются
решениями уравнения (8), то каждая из
скобок обратится и нуль, а вместе с ними
и вся левая часть уравнения; это и
означает, что функция и является его
решением.
являются
решениями уравнения (8), то каждая из
скобок обратится и нуль, а вместе с ними
и вся левая часть уравнения; это и
означает, что функция и является его
решением.
Точно такое же свойство, как известно, имеет место и для обыкновенных линейных дифференциальных уравнений. Однако надо иметь в виду, что обыкновенное линейное дифференциальное уравнение n-го порядка имеет в точности n линейно независимых частных решений, линейная комбинация которых и дает общее решение.
Уравнение же в
частных производных может иметь, как
мы убедимся в дальнейшем,
бесконечное множество линейно
независимых частных решений,
т. е. такое множество решений, любое
конечное число которых является функциями
линейно независимыми. (Система функций
![]() называется линейно независимой, если
ни одна из этих функций не является
линейной комбинацией опальных.) В
соответствии с этим нам придется иметь
дело не только с линейными комбинациями
конечного числа решений, но и с р яд а м
и, членами которых служат произведения
произвольных постоянных на частные
решения:
называется линейно независимой, если
ни одна из этих функций не является
линейной комбинацией опальных.) В
соответствии с этим нам придется иметь
дело не только с линейными комбинациями
конечного числа решений, но и с р яд а м
и, членами которых служат произведения
произвольных постоянных на частные
решения:
 (10)
(10)
Мы дадим здесь необходимые определения и укажем некоторые свойства рядов, членами которых являются функции нескольких переменных. Этими свойствами мы будем пользоваться и в дальнейшем.
Будем считать, что члены ряда — функции двух переменных; все определения легко переносятся на случай функций трех переменных.
Рассмотрим функциональный ряд
 (11)
(11)
Этот ряд называется
сходящимся в точке
![]() ,
если
числовой ряд
,
если
числовой ряд
![]() сходится.
Совокупность всех точек, в которых ряд
сходится, называется
областью сходимости ряда.
Все члены ряда считаются непрерывными
и дифференцируемыми функциями переменных
х и
у во всей
области сходимости ряда.
сходится.
Совокупность всех точек, в которых ряд
сходится, называется
областью сходимости ряда.
Все члены ряда считаются непрерывными
и дифференцируемыми функциями переменных
х и
у во всей
области сходимости ряда.
Мы будем в дальнейшем рассматривать только такие ряды, суммы которых есть непрерывные функции от х и у,
 (2)
(2)
Кроме того, будем предполагать, что все встречающиеся ряды можно дважды почленно дифференцировать, т. е. что


 (13)
(13)
и т.д.
Очень часто нам
придется интегрировать ряд (12) либо по
некоторой области D,
либо по одной из переменных. Последнее
означает, что мы полагаем, например![]() и
интегрируем
по х
в некоторых пределах от
и
интегрируем
по х
в некоторых пределах от
![]() до
до
![]() .
Возможность почленного интегрирования
ряда заключается в том, что
.
Возможность почленного интегрирования
ряда заключается в том, что
 (14)
(14)
(Разумеется,
предполагается, что рассматриваемые
значения х
и
![]() принадлежат области сходимости ряда.)
принадлежат области сходимости ряда.)
Обозначим сумму
ряда (10) через
![]() и будем считать,
что выполняются все введенные
предположения. Тогда
и будем считать,
что выполняются все введенные
предположения. Тогда



Отсюда ясно, что
функция
![]() —сумма ряда
(10), так же как и члены ряда, является
решением уравнения (8).
—сумма ряда
(10), так же как и члены ряда, является
решением уравнения (8).
Можно указать сравнительно простые признаки, при соблюдении которых все высказанные предположения о рядах будут справедливы. Введем для этого следующее определение.
Функциональный ряд
![]()
называется правильно сходящимся в области D, принадлежащей области сходимости ряда, если все члены его по абсолютной величине не превосходят соответствующих членов некоторого сходящегося знакоположительного числового ряда, т. е.
![]()
причем неравенство
соблюдается во всех точках области D,
а
![]() — член сходящегося числового ряда.
— член сходящегося числового ряда.
Для правильно сходящихся рядов имеют место следующие теоремы, которые мы приводим без доказательства.
-
Сумма правильно сходящегося ряда из непрерывных функций есть функция непрерывная.
-
Правильно сходящийся ряд можно почленно интегрировать.
-
Если ряды, составленные из производных сходящегося ряда, сходятся правильно, то ряд можно почленно дифференцировать.
Определение правильно сходящегося ряда без всяких изменений переносится как на функции одной переменной, так и на функции трех и большего числа переменных.
Напомним, что все
три сформулированные свойства имели
место для степенных рядов
![]() в интервале
их сходимости. Нетрудно показать, что
степенной ряд является правильно
сходящимся в любом интервале, целиком
заключенном в интервале сходимости
ряда (см. [1], п. 190).
{ Для
читателей, знакомых с определением
равномерной сходимости ряда, отметим,
что если ряд сходится правильно, то он
сходится и равномерно; однако не всякий
равномерно сходящийся ряд сходится
правильно.}
в интервале
их сходимости. Нетрудно показать, что
степенной ряд является правильно
сходящимся в любом интервале, целиком
заключенном в интервале сходимости
ряда (см. [1], п. 190).
{ Для
читателей, знакомых с определением
равномерной сходимости ряда, отметим,
что если ряд сходится правильно, то он
сходится и равномерно; однако не всякий
равномерно сходящийся ряд сходится
правильно.}
В дальнейшем нам
встретятся и такие случаи, когда функция
![]() при всех
значениях параметра
при всех
значениях параметра
![]() ,
заключенных в некотором интервале
,
заключенных в некотором интервале
![]() ,
является решением уравнения (8). Тогда
говорят, что
частные решения зависят от непрерывно
изменяющегося параметра.
Обычно интервал изменения параметра
,
является решением уравнения (8). Тогда
говорят, что
частные решения зависят от непрерывно
изменяющегося параметра.
Обычно интервал изменения параметра
![]() составляет или всю числовую ось, или
положительную полуось.
составляет или всю числовую ось, или
положительную полуось.
Мы будем в дальнейшем
функцию
![]() записывать
в виде
записывать
в виде
![]() .
Этой
формой записи подчеркивается аналогия
между случаями, когда решения зависят
от параметра, принимающего только целые
значения (
.
Этой
формой записи подчеркивается аналогия
между случаями, когда решения зависят
от параметра, принимающего только целые
значения (![]() ),
и когда решения зависят от параметра,
принимающего любые значения
(
),
и когда решения зависят от параметра,
принимающего любые значения
(![]() ).
).
Покажем, что если
мы умножим функцию
![]() на
произвольную функцию С(
на
произвольную функцию С(![]() )
и проинтегрируем в пределах изменения
параметра
)
и проинтегрируем в пределах изменения
параметра
![]() :
:
 (15)
(15)
то вновь получим решение уравнения (8). Ясно, что интеграл (15) есть некоторая функция переменных х и у.
Предварительно познакомимся с некоторыми свойствами интегралов типа (15). Пусть дан интеграл
 (16)
(16)
где
![]() и
и
![]() — конечные пределы. Имеет место следующая
теорема, которую мы приводим без
доказательства.
— конечные пределы. Имеет место следующая
теорема, которую мы приводим без
доказательства.
Если подынтегральная
функция ![]() ,
а также ее
частные производные по х и по у непрерывна
при всех рассматриваемых значениях
аргументов х, у и
,
а также ее
частные производные по х и по у непрерывна
при всех рассматриваемых значениях
аргументов х, у и
![]() то и функция F(x,
у) непрерывна вместе со своими частными
производными, причем
то и функция F(x,
у) непрерывна вместе со своими частными
производными, причем


 (17)
(17)
и т. д.
В случае, когда хотя бы один из пределов интегрирования обращается в бесконечность, интеграл (16) становится несобственным и указанные свойства функции F(x, y) соблюдаются лишь при некоторых дополнительных условиях, о которых мы скажем ниже.
Возвращаясь к
интегралу (15), обозначим его через U(x,
у) и предположим,
что для него справедливы формулы
(17). При этом пределы интегрирования
![]() и
и
![]() могут быть как конечными, так и
бесконечными. Тогда
могут быть как конечными, так и
бесконечными. Тогда



и т. д.
Подставляя выражения для функции U(x, у) и ее производных в уравнение (8) и заменяя сумму интегралов интегралом от суммы функций, получим в левой части

Так как по предположению
выражение в квадратных скобках при
любом
![]() равно нулю (ведь функция
равно нулю (ведь функция
![]() при любом
при любом
![]() является решением уравнения (8)), то и
весь интеграл равен нулю. Следовательно,
функция U
(x,
у) действительно
является решением уравнения.
является решением уравнения (8)), то и
весь интеграл равен нулю. Следовательно,
функция U
(x,
у) действительно
является решением уравнения.
Сформулируем простой
признак, аналогичный соответствующему
признаку для рядов, при соблюдении
которого выполняются все приведенные
свойства для несобственных интегралов
вида
 где один или оба предела интегрирования
обращаются в бесконечность.
где один или оба предела интегрирования
обращаются в бесконечность.
Если можно указать
такую положительную функцию
![]() ,
что для всех
рассматриваемых значений х, у и
,
что для всех
рассматриваемых значений х, у и
![]() соблюдается неравенство
соблюдается неравенство
![]() и несобственный интеграл от функции
и несобственный интеграл от функции
![]() сходится,
то функция F(x,
у) непрерывна.
Такую сходимость несобственного
интеграла от функции
сходится,
то функция F(x,
у) непрерывна.
Такую сходимость несобственного
интеграла от функции
![]() будем
называть
правильной.
будем
называть
правильной.
Если аналогичное
свойство имеет место и для интегралов
от частных
производных функции
![]() ,
то функция F
(х, у)
дифференцируема
и ее производные находятся по формулам
(17). Например,
если
,
то функция F
(х, у)
дифференцируема
и ее производные находятся по формулам
(17). Например,
если
 — и
интеграл от
— и
интеграл от
![]() сходится,
то
сходится,
то

3. Оператор
Лапласа в полярных, цилиндрических и
сферических координатах. {
Этот
пункт следует прочесть или перед
изучением задач, в
которых встретится необходимость
преобразования оператора Лапласа (п.
32, п. 49—50), или перед чтением гл. III
}
В этом пункте мы рассмотрим
вспомогательный вопрос о выражении
оператора Лапласа о различных системах
координат; эти выражения понадобятся
нам в дальнейшем. Напомним, что
трехмерным оператором Лапласа
![]() называется выражение
называется выражение
 (18)
(18)
где
![]() — функция трех переменных. Если функция
и зависит
только от двух переменных, то оператор
Лапласа
— функция трех переменных. Если функция
и зависит
только от двух переменных, то оператор
Лапласа
 (19)
(19)
называется двумерным.
Начнем с двумерного
оператора Лапласа и произведем замену
декартовых координат х и у полярными r
и
![]() по формулам
по формулам
![]()
![]() (20)
(20)
Если в функцию
![]() подставить
вместо x
и у
их выражения, то получится функция
подставить
вместо x
и у
их выражения, то получится функция
![]()
![]() переменных
r
и
переменных
r
и
![]() .
Выразив вторые производные от функции
u
по х
и по у
через производные по r
и
.
Выразив вторые производные от функции
u
по х
и по у
через производные по r
и
![]() и подставив
затем найденные выражения в формулу
(19), мы и получим оператор Лапласа в
полярных координатах.
и подставив
затем найденные выражения в формулу
(19), мы и получим оператор Лапласа в
полярных координатах.
По правилу дифференцирования сложной функции

 (21)
(21)
Для отыскания частных
производных r
и
![]() по
х и
у выразим
из формул (20) r
и
по
х и
у выразим
из формул (20) r
и
![]() .
Находим, что
.
Находим, что
![]() отсюда
отсюда
 и
и
 (22)
(22)
Поскольку
 , то
, то
 и
и

Заменяя х и у по формулам (20), получим
 и
и  (23)
(23)
Подставив (22) и (23) в
равенства (21), окончательно найдем
выражения частных производных
 и
и
 через переменные r
и
через переменные r
и
![]() и
производные по этим переменным:
и
производные по этим переменным:

 (24)
(24)
Перейдем к отысканию
вторых производных. Применим к производной
 опять правило
дифференцирования сложной функции
опять правило
дифференцирования сложной функции

Из равенств (24) д{дї) д*и


Умножим теперь
первое равенство на
 ,
а второе на
,
а второе на
 и сложим. Приводя подобные члены,
получим
и сложим. Приводя подобные члены,
получим
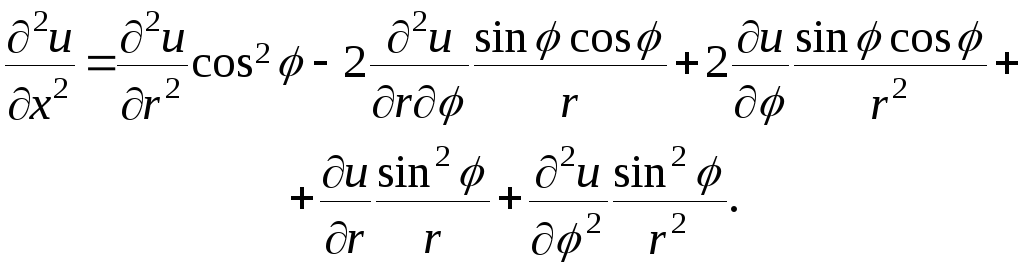 (25)
(25)
Совершенно аналогично, воспользовавшись соотношением

найдем, что
 (26)
(26)
Складывая (25) и (26), окончательно получим выражение оператора Лапласа в полярных координатах:
 (27)
(27)
Последнее выражение очень часто бывает удобно записать в следующем виде:
 (28)
(28)
Тождественность правых частей формул (28) и (27) легко проверяется дифференцированием.
Перейдем к трехмерному
случаю и начнем с
цилиндрических координат.
Цилиндрические координаты r
,
![]() и
z
связаны с
декартовыми соотношениями
и
z
связаны с
декартовыми соотношениями
![]()
![]()
![]()
Функция
![]() преобразуется в функцию
преобразуется в функцию
![]()
![]() .
Здесь третья переменная
z
остается неизменной, и в выражении (27)
двумерного оператора Лапласа в полярных
координатах добавляется только вторая
производная по z:
.
Здесь третья переменная
z
остается неизменной, и в выражении (27)
двумерного оператора Лапласа в полярных
координатах добавляется только вторая
производная по z:
 (29)
(29)
Для сферических
координат r
,
![]() и
и
![]() имеем
формулы:
имеем
формулы:
![]()
![]()
![]()
в которых
![]() —
расстояние точки
(х, у, z)
от начала координат,
—
расстояние точки
(х, у, z)
от начала координат,
![]() — угол между радиусом-вектором точки
и осью Oz,
а
— угол между радиусом-вектором точки
и осью Oz,
а
![]() — угол между проекцией радиуса- вектора
на плоскость
Оху и осью
Ох. Здесь
непосредственное преобразование
производных функции
— угол между проекцией радиуса- вектора
на плоскость
Оху и осью
Ох. Здесь
непосредственное преобразование
производных функции
![]()
![]()
![]() очень
громоздко, и мы его проводить не будем,
ограничившись тем, что выпишем
окончательное выражение оператора
Лапласа в сферических координатах:
очень
громоздко, и мы его проводить не будем,
ограничившись тем, что выпишем
окончательное выражение оператора
Лапласа в сферических координатах:

Эту формулу часто записывают в виде
 (31)
(31)
Предоставляем читателю проверить тождественность обеих формул.