

TMM_metodichka_2014
.pdfРис 5.9. Картина евольвентного зачеплення
41
5.4. Синтез кулачкового механізму
Синтез кулачкових механізмів розпочинають з побудови у довільному масштабі графіка зміни аналога прискорення штовхача d2s/dφ2 від кута повороту φ. Використовують при цьому відомі методи побудови кривих (синусоїди, параболи тощо). У випадку несиметричного закону руху штовхача графік зміни аналога прискорення штовхача від кута повороту будують з урахуванням заданих у завданні відношень а1/а2 і фазового кута повороту φП.
Вважають, що графіки зміни прискорення на фазі піднімання і опускання штовхача однакові.
Для побудови графіка першої похідної від зміщення веденої ланки потрібно виконати подвійне графічне інтегрування другої похідної від зміщення веденої ланки за кутом повороту кулачка. Графіки слід будувати за 8-12 точками на кожній фазі руху штовхача.
Для кулачкових механізмів з роликовим штовхачем мінімальний радіус кулачка та інші основні розміри визначають за допустимим
кутом тиску доп або мінімальним кутом передачі доп 90 доп
шляхом графічного визначення області можливого розташування центра обертання кулачка.
При цьому слід мати на увазі, що для кулачкових механізмів з коромислом величина l(dψ/dφ) , де l – довжина коромисла, відкладається на фазі віддалення до центра обертання коромисла, якщо коромисло і кулачок обертаються в різні сторони.
Для кулачкових механізмів з роликовим штовхачем при обертанні кулачка за годинниковою стрілкою величина ds/dφ на фазі віддалення відкладається вправо, а при обертанні кулачка проти годинникової стрілки – вліво.
Для кулачкових механізмів з плоским штовхачем мінімальний
радіус кулачка вибирається з умови опуклості профілю кулачка |
|
||||
R |
d |
2 |
s / d 2 |
s |
(5.35) |
min |
|
|
|
|
|
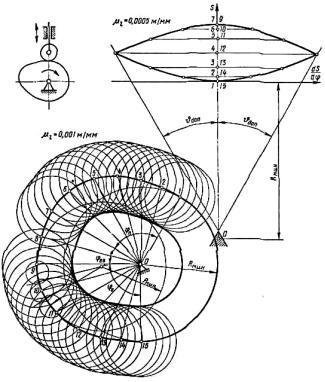
Для кулачкових механізмів з роликовим штовхачем способом зворотнього руху будують центровий (теоретичний).профіль кулачка, а потім визначають допустиме значення радіуса ролика з наступних умов:
rp |
0,8 min |
(5.35) |
rp |
(0,4...0,5)Rmin |
(5.35) |
де min – мінімальний радіус кривизни для опуклих ділянок центрового профілю кулачка; Rmin – мінімальний радіус основної шайби центрового профілю кулачка.
42
Мінімальний радіус кривизни визначається наближено як
радіус кола, яке проходить через три точки, які вибираються на ділянці центрового профілю, де можливо очікувати мінімальний радіус кривизни.
Після, визначення радіуса ролика будують практичний (дійсний) профіль кулачка як обгинаючу множини кіл радіусом rр, центри котрих розміщені на центровому профілі. Для кулачкових механізмів з плоским штовхачем практичний профіль кулачка будується як крива, дотична до всіх положень тарілки штовхача відносно кулачка. Точки дотику профілю кулачка до тарілки штовхача повинні бути розташовані на віддалі ds/dφ від прямої, яка проходить через центр кулачка паралельно до напрямку руху штовхача.
Графік зміни кута тиску 90 від кута повороту кулачка
будують у довільному масштабі шляхом замірювання гострих кутів між векторами ds/dφ та променями, які з'єднують відповідні точки на кривій з вибраним центром обертання кулачка.
На рис. 5.9 і 5.10 наведено приклад компонування зображень листа 4 графічної частини.
Рис. 5.9. Побудова профілю кулачка
43
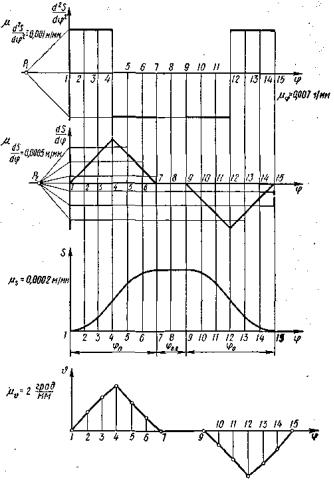
Рис. 5.10. Діаграми руху вихідної ланки кулачкового механізму
44
ПЕРЕЛІК РЕКОМЕНДОВАНОЇ ЛІТЕРАТУРИ
1.Артоболевский И. И. Теория механизмов и машин. – М.:
Наука, 1988. – 640 с.
2.Гуляев К. И. и др. Расчет геометрии эвольвентной цилиндрической зубчатой передачи внешнего зацепления. – Л.: Машиностроение, 1975. – 66 с.
3.Заблонский К. И., Белоконев И. М., Щекин Б. М. Теория механизмов и машин. – К.: Вища школа, 1989. – 376 с.
4.Карелин В. С. Проектирование рычажных и зубчаторычажных механизмов. – М.: Машиностроение, 1986. – 184 с.
5.Кіницький Я.Т. Теорія механізмів і машин. – К.: Наукова думка, 2002. – 662с.
6.Кореняко О. С. Теор1я мехашзмів і машин. – К.: Вища школа, 1987. –206 с.
7.Курсовое проектирование по теории механизмов и машин / Под ред. Г. Н. Девойно. – Минск: Вышэйш. шк., 1986. – 285 с.
8.Курсовое проектирование по теории механизмов и машин / Под ред. А.С. Кореняко. – К.: Выща шк., 1970. – 332 с.
9.Левитская О. Н., Левитский Н. И. Курс теории механизмов и машин. –М: Высш. щк., 1985. – 279 с.
10.Левитский Н. И. Кулачковые механизмы. – М.: Машиностроение, 1985. –287 с.
11.Попов Н. Я. Расчет и проектирование кулачковых механизмов. – М.: Машиностроение, 1980. – 214 с.
12.Теория механизмов и машин / Под ред. К. В. Фролова. – М..
Высш. шк., 1987. – 496 с.
13.Теория механизмов / Под ред. В. А. Гавриленко. – М.:
Высш. шк., 1973. –640 с.
14.Юдин В. А., Петрокас Л. В. Теория механизмов и машин. –
М.: Высш. шк., 1977. – 527 с.
45
ЗМІСТ
ВСТУП ………………………………………………………………... 3
1.ЗАГАЛЬНІ РЕКОМЕНДАЦІЇ .…………………………….….…... 4
2.ОФОРМЛЕННЯ КУРСОВОГО ПРОЕКТУ …………….…….….. 5
3. ЗМІСТ КУРСОВОГО ПРОЕКТУ ………………………………… |
7 |
3.1. Динамічний синтез важільного механізму за коефіцієнтом |
|
нерівномірності руху ………………………………………………. |
7 |
3.2. Динамічний аналіз важільного механізму …………………… |
8 |
3.3. Проектування кінематичної схеми планетарного редуктора |
|
та побудова картини евольвентного зачеплення ………………... |
8 |
3.4. Синтез кулачкового механізму …………………………….…. 9
4.ЗАВДАННЯ НА КУРСОВИЙ ПРОЕКТ …………………………. 10 Тема 1. Механізми витяжного пресу ……………………………... 10 Тема 2. Механізми поперечно-стругального верстату ………….. 12 Тема 3. Механізми довбального верстату ……………………….. 14 Тема 4. Механізми коливного конвеєру …………………………. 16 Тема 5. Механізми повітряного компресору …………………….. 18
Тема 6. |
Механізми приводу глибинного насосу ………………… |
20 |
Тема 7. |
Механізми дизель-повітродувної установки ……………. |
22 |
Тема 8. |
Механізми двигуна внутрішнього згорання …………….. |
24 |
Тема 9. |
Механізми трактора з двоциліндровим двигуном ……… |
26 |
5. МЕТОДИЧНІ РЕКОМЕНДАЦІЇ |
28 |
|
5.1. Динамічний синтез важільного механізму за коефіцієнтом |
|
|
нерівномірності руху ………………………………………………. |
29 |
|
5.2. Динамічний аналіз важільного механізму …………………… |
36 |
|
5.3. Проектування кінематичної схеми планетарного редуктора |
|
|
та побудова картини евольвентного зачеплення ………………... |
38 |
|
5.3.1. Проектування кінематичної схеми планетарного |
|
|
редуктора …………………………………………………………… |
38 |
|
5.3.2. Побудова картини евольвентного зачеплення …………….. |
39 |
|
5.4. Синтез кулачкового механізму …………………………….…. |
42 |
|
ПЕРЕЛІК РЕКОМЕНДОВАНОЇ ЛІТЕРАТУРИ …………………… |
45 |
|
46
Для нотаток та робочих записів
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
47

Легета Ярослав Павлович
МЕТОДИЧНІ ВКАЗІВКИ ТА ЗАВДАННЯ ДО КУРСОВОГО ПРОЕКТУ
З ТЕОРІЇ МЕХАНІЗМІВ І МАШИН
для студентів напряму підготовки 6.050202 “Інженерна механіка”
Підписано до друку _______. Формат 60х84/16. Умовн. друк. арк. _______. Облік.-вид. арк. _______. Друк офсетний. Зам. № _______. Наклад 100.
Надруковано з готових форм у Видавництві Ужгородського національного університету “Говерла” м. Ужгород, вул. Капітульна, 18, тел.: 3–32–48
Свідоцтво про внесення до державного реєстру видавців, виготівників і розповсюджувачів видавничої продукції – Серія Зт №32
48