

TMM_metodichka_2014
.pdf21
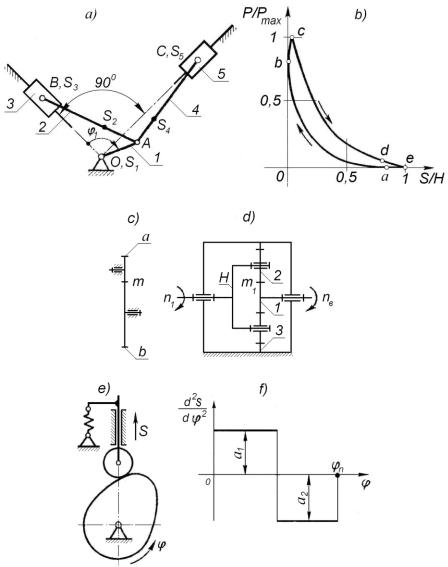
Тема 7. Механізми дизель-повітродувної установки
Рис. 4.7. Механізми дизель-повітродувної установки а – важільний механізм дизель-повітродувної установки;
b– індикаторна діаграма двигуна;
c– проста ступінь зубчастого редуктора;
d– планетарна ступінь зубчастого редуктора;
e– схема кулачкового механізму;
f– графік зміни аналога прискорення коромисла.
22
23
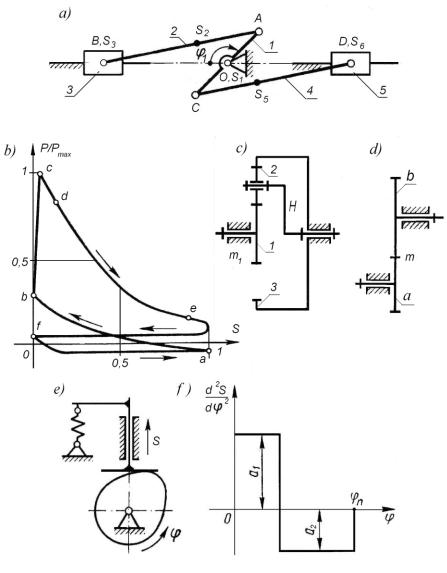
Тема 8. Механізми двигуна внутрішнього згорання
Рис. 4.8. Механізми двигуна внутрішнього згорання а – важільний механізм двигуна; б – індикаторна діаграма двигуна;
c – планетарна ступінь коробки передач; d – проста ступінь коробки передач;
e – схема кулачкового механізму;
d– графік зміни аналога прискорення коромисла.
24
25
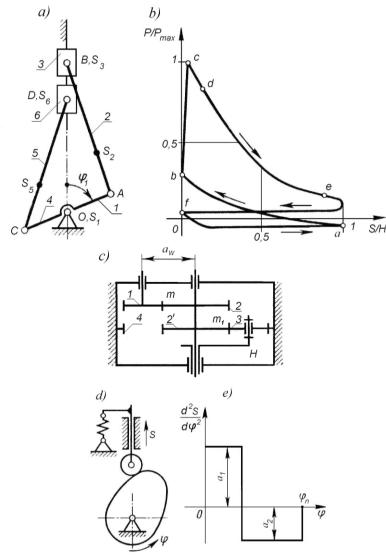
Тема 9. Механізми трактора з двоциліндровим двигуном
Рис. 4.9. Механізми трактора з двоциліндровим двигуном а – важільний механізм двигуна;
b – індикаторна діаграма двигуна;
c – планетарна і проста ступені редуктора; d – схема кулачкового механізму;
e – графік зміни аналога прискорення коромисла кулачкового механізму.
26
27
5.МЕТОДИЧНІ РЕКОМЕНДАЦІЇ
Вданій частині методичних вказівок послідовно по пунктах наведено роз’яснення стосовно вирішення питань, поставлених в кожному розділі курсового проекту.
У першу чергу для заданого механізму проводять структурний аналіз. Для цього з’ясовують та записують, які кінематичні пари утворюють ланки міх собою (обертальні, поступальні чи вищі) та вказують їх клас. Після цього шукають ступінь рухомості механізму.
Ступінь рухомості плоского механізму (рух ланок якого здійснюється в одній або паралельних площинах) та кількість ведучих ланок визначають за формулою Чебишева:
W 3n 2 p5 p4 |
(5.1) |
де n – кількість рухомих ланок; p4 і p5 |
відповідно кількість |
кінематичних пар ІV і V класів. |
|
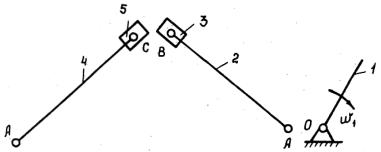
Далі виділяють структурні групи, які входять до складу механізму та ведучу ланку, наводять їх рисунки у пояснювальній записці (рис. 5.1).
Рис. 5.1. Приклад виділення структурних груп
Склад механізму і послідовність приєднання до ведучої ланки структурних груп виражають формулою будови механізму. У цій формулі римськими цифрами позначають класи ведучої ланки і структурних груп, а в круглих дужках арабськими цифрами – номери ланок, які входять до їх складу. Так, наприклад, формула будови може мати вигляд:
I (0,1) II (2,3) II (4,5) |
(5.2) |
Вона вказує на те, що до механізму першого класу (ведучої ланки), який утворений стояком 0 і кривошипом 1, послідовно приєднані дві структурні групи другого класу, які утворені відповідно ланками 2, 3 та 4, 5. З формули будови можна зробити висновок, що даний механізм є механізмом другого класу.
28
5.1. Динамічний синтез важільного механізму за коефіцієнтом нерівномірності руху
Динамічний синтез механізму за коефіцієнтом нерівномірності руху полягає у визначенні моменту інерції маховика, який забезпечить рух ланки зведення із заданою нерівномірністю. Синтез ведуть у такій послідовності.
1. У лівій частині креслення будують плани положень механізму для 12 рівновіддалених положень ведучої ланки (кривошипа ОА). За початкове (нульове) положення кривошипа вибирають таке його положення, при якому ведена ланка займає одне із крайніх положень (у цьому положенні швидкість характерної точки, яка належить веденій ланці, рівна нулю).
Побудову положень ланок плоских механізмів можна здійснити методами засічок, кругових шаблонів і геометричних місць.
Побудову здійснюють у певному масштабі. Для цього використовують масштабний коефіцієнт, під яким розуміють відношення фізичної величини (шляху, швидкості тощо) до довжини відрізка, який цю величину зображає на рисунку. Масштабний коефіцієнт, який ще називають "масштабом", позначають літерою μ з індексом тієї величини, яка зображена графічно. Наприклад, при зображенні лінійних розмірів механізму масштаб буде визначатися за формулою
|
|
|
lOA |
, |
м |
(5.3) |
|
l |
OA |
мм |
|||||
|
|
|
|
||||
|
|
|
|
|
де lOA – дійсна величина кривошипа ОА, м; ОА – довжина відрізка ОА, мм.
2. Будують у довільному масштабі 12 повернутих планів швидкостей. Для зручності приймають довжину вектора, який зображає швидкість точки А кривошипа, рівною 40 - 60мм.
Масштабний коефіцієнт швидкостей визначають за формулою
|
|
|
VA |
, |
м |
(5.4) |
|
V |
pa |
мм с |
|||||
|
|
|
|
||||
|
|
|
|
|
де VA – швидкість точки А, м/с.;
ра – довжина відрізка, що зображає цю швидкість на кресленні, мм. 3. Будують графік зведеного моменту інерції від кута повороту
кривошипа. За ланку зведення вибирають кривошип механізму.
Для кожного положення механізму зведений момент інерції ланок визначають за формулою
29
n |
|
V |
si |
|
2 |
|
|
i |
|
2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
(5.5) |
||
|
|
|
|
|
|
|
|
||||||
J зв mi |
1 |
|
|
J si |
1 |
|
|
||||||
i 1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де mi – маса і-тої ланки; Jsi - момент інерції і-тої ланки відносно осі, яка проходить через центр мас ланки; ωі- кутова швидкість і-тої ланки; Vsi - швидкість центра мас і-тої ланки; ω1 - кутова швидкість обертання кривошипа.
Відношення швидкостей визначають з планів. Наприклад,
|
2 |
|
ab |
|
LO A |
|
V |
s 2 |
|
ps |
2 |
L |
|
|
|
|
1 |
; |
|
|
|
(5.6) |
|||||||
|
|
|
|
|
|
|
|
|
||||||
1 |
|
pa |
|
LAB |
|
|
1 |
|
pa |
O A |
|
|||
|
|
|
|
|
1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Результати розрахунків зводяться до таблиці.
Будуючи графік зведеного моменту інерції Jзв від кута повороту φ1 вісь ординат доцільно направляти горизонтально.
4. Будують графіки зведених моментів від сил опору (для технологічних машин) і від рушійних сил (для двигунів внутрішнього згоряння тощо).
Для двигунів внутрішнього згоряння (ДВЗ) графік зведеного моменту від рушійних сил будують за індикаторною діаграмою, а зведений момент від сил опору вважають постійним.
Для технологічних машин графік зведеного моменту від сил опору будують, користуючись діаграмою сил виробничого опору, а зведений момент від рушійних сил вважають постійним.
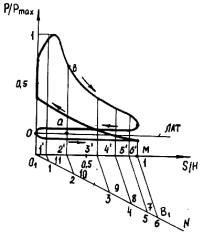
Для визначення сили, яка діє на поршень циліндра ДВЗ, індикаторну діаграму викреслюють за даними, наведеними у завданні на курсовий проект у таблиці залежності тиску газу в циліндрі від переміщення поршня в довільному масштабі (рис. 5.2).
Рис. 5.2. Індикаторна діаграма
30