

Л.1.2.АРК
.pdfде – кут, утворений площинами пошукової та першої статорної котушок.
Аналізуючи отриманий вираз, можна зробити висновок, що обертання пошукової котушки у гоніометрі призводить до зміни ЕРС, що наводиться в ній, за синусоїдальним законом. Це обертання еквівалентне обертанню рамочних антен у електромагнітному полі, що створюється передавачем.
Таким чином, визначення напрямку на радіопередавач полягає у знаходженні такого положення пошукової котушки гоніометра, при якому забезпечується нульове значення вихідної напруги з гоніометра на вході приймального пристрою.
Прийнятий антенною системою сигнал надходить на приймач, де застосовується додаткова місцева модуляція. Визначення напрямку на передавальну радіостанцію виконується по мінімуму глибини модуляції. Крім того, приймач забезпечує перетворення та підсилення сигналу до необхідної величини.
В радіопеленгаторах використовується візуальна та слухова індикація. При візуальній індикації радіопеленга застосовуються електронні або аналогові стрілочні індикатори. Слухова індикація використовується для розпізнавання радіостанцій, що пеленгуються. Крім того, слухова індикація може використовуватись для визначення напрямку на радіопередавач в аварійних режимах.
2.3.2. Помилки у визначенні радіопеленгів
При визначенні напрямку на передавальну радіостанцію у радіопеленгаторах виникають помилки, викликані різними причинами. Найбільш суттєве значення мають так звані методичні помилки, які виникають внаслідок недосконалості методів вимірювання пеленгів і залежать головним чином від умов поширення радіохвиль. До них відносяться полярізаційні помилки і помилки, викликані береговим та горним ефектами.
Полярізаційні помилки виникають при прийомі рамочною антеною ненормально полярізованих радіохвиль (тобто коли
вектор нахилений відносно площини поширення радіохвиль). Полярізаційні помилки зазвичай збільшуються вночі за рахунок прийому просторових радіохвиль, які мають мають ненормальну

полярізацію. Вдень просторові хвилі практично повністю поглинаються іоносферою, внаслідок чого рамкою приймаються тільки поверхневі хвилі, що мають нормальну полярізацію. У зв’язку з цим полярізаційні помилки часто називають помилками ночного ефекту.
Сутність полярізаційної помилки полягає в тому, що внаслідок ненормальної полярізації хвилі ЕРС буде наводитись як у вертикальних, так і у горизонтальних дротах рамки. Сумарна характеристика напрямленості антени складається з часткових характеристик напрямленості складових електричного поля (рис. 2.14). Її вісь мінімумів буде зміщеною на кут відносно дійсного напрямку на радіопередавач.
Дійсний нуль Е
Хибний
нуль
Ег Ев
Рис. 2.14. Поліризаційна помилка
У нічний час і особливо в період сходу та заходу сонця кут нахилу полярізації та фронту хвилі збільшується і неперервно змінюється із-за постійної зміни висоти і товщини іонізованого шару атмосфери. Це призводить до зростання помилок при пеленгуванні до величини 8…10 .
Для зменшення полярізаційних помилок для пеленгування вибирають найближчу радіостанцію з високою потужністю і низькою несучою частотою, осереднюють показання радіокомпасу або використовують наземні радіопеленгатори з рознесеними антенами.
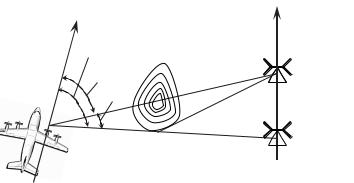
Береговим ефектом називається явище заломлення радіохвиль, що виникає на межі “земля-море” (рис. 2.15).

|
Берегова |
ПН |
|
лінія |
|
|
|
|
|
|
Дійсний |
ККРіст |
|
маяк |
ККР
ККРвим 
 Хибний маяк
Хибний маяк
Море Земля
Рис. 2.15. Суть помилки берегового ефекту
Це явище викликане тим, що електрична провідність суші та водної поверхні різна. Отже, різні й коефіцієнти поглинання електромагнітної енергії цими середовищами, тому відбувається зміна напрямку поширення радіохвиль. Найбільші помилки виникають тоді, коли кут між береговою смугою та напрямком поширення радіохвиль дуже малий. Якщо ж передавальна радіостанція розташована так, що ЕМХ перетинає берегову смугу під прямим кутом, то помилка дорівнює нулю. Помилки, викликані береговим ефектом, можуть досягати 5…7 . Для їх зменшення необхідно вибирати радіостанції таким чином, щоб кут перехрещення лінії пеленгу з береговою смугою був більший за
20 .
Сутність гірського ефекту полягає в тому, що ЕМХ огинає гірські вершини та височини, що зустрічаються на шляху її розповсюдження (явище дифракції, рис. 2.16). Помилки, викликані дифракцією, досягають 8…10 . Для зменшення помилок необхідно вибирати таку радіостанцію, щоб на лінії пеленгу було якомога менше різних нерівностей рельєфу. Ці помилки зменшуються із збільшенням висоти польоту.
|
ПН |
ККРвим |
Дійсний |
|
|
ККРіст |
маяк |
ККР |
|
Хибний маяк
Рис. 2.16. Суть помилки берегового ефекту
2.3.3. Радіодевіація
Радіопеленгатор повинен встановлюватись у таких місцях ПС, де оточуючі його елементи фюзеляжу та інші системи авіоніки (антенні системи, потужні електромагніти, тощо) найменше впливають на точність пеленгування. Але повністю позбутися завад неможливо. Особливо великі помилки виникають в бортових перенгаторах за рахунок впливу металевої конструкціх фюзеляжу літака.
Фізична сутність цих помилок полягає в тому, що ЕМХ наводить ЕРС не тільки в антенній системі, але і у всіх металевих частинах літака. Завдяки цьому на поверхні літака виникають струми високої частоти, які утворюють поле вторинного випромінення. Вектор цього поля частіше всього не збігається за напрямком з вектором електромагнітного поля первинного випромінення. Тому рамочна антена, приймаючи ЕМХ, що приходять від радіостанцій та радіомаяків, одночасно приймає хвилі вторинного випромінення, а отже вкахує кут пеленгу на осногві сумарного електромагнітного поля. Помилка у вимірюванні пеленгу, що виникає за рахунок впливу на антену поля вторинного випромінення, називається радіодевіацією.
Кількісно радіодевіація дорівнює куту Р (рис. 2.17) між напрямком на радіопередавач, що визначений радіопеленгатором, та дійсним напрямком на радіостанцію:
Р = ККР – ВРК,
де ВРК – відлік радіокомпасу, тобто кут, утворений поздовжньою віссю літака і напрямком нульового прийому рамки.

ВРК
ККР
 Р
Р
Рис. 2.17. Визначення радіодевіації
Радіодевіацію прийнято відраховувати від виміряного дійсного напрямку на радіостанцію. Якщо при цьому відлік виконується за годинниковою стрілкою, то радіодевіація додатна, якщо проти годинникової стрілки – від’ємна.
Експериментальні дослідження показали, що радіодевіація додатна у першій та третій чвертях і від’ємна у другій та четвертій чвертях. Радіодевіація має нульове значення при ККР, кратних 90, а максимальне її значення спостерігається при курсових кутах, рівних 45, 135, 225 та 315 , і може досягати 20 . Таким чином, крива радіодевіації має періодичний характер (рис. 2.18). Іноді графік Р будують у полярній системі координат, який має вигляд еліпсу (рис. 2.19).
|
|
|
315 |
0 |
45 |
Р |
|
|
|
||
|
|
|
|
|
|
0 |
180 |
|
270 |
|
90 |
|
ККР |
|
|||
90 |
270 |
|
|
|
|
|
|
|
|
|
|
|
|
|
225 |
180 |
135 |
|
|
|
|
|
Рис. 2.18 |
Рис. 2.19 |
Теоретично обчислити значення |
радіодевіації неможливо, |
оскільки не можна врахувати усі випадкові фактори, що впливають на неї. Це викликає необхідність визначення Р експериментальним шляхом. Процес визначення Р і складання її графіку називається списуванням радіодевіації. Для зменшення помилок при пеленгуванні у сучасних радіокомпасах здійснюється
компенсація радіодевіації. Застосовуються електричні та механічні способи компенсації.
Електричний спосіб компенсації використовується в радіокомпасах, які мають гоніометричну антенну систему. З цією метою рамочні антени виконуються різними по діючій висоті. Діюче значення висоти поперечної рамки більше, ніж поздовжньої, що досягається за рахунок збільшення геометричних розмірів осердя. ЕРС, що наводиться у рамках такої антенної системи і в рамках з однаковою діючою висотою, при однакових значеннях ККР буде різною. Це призводить до зміни струму і магнітного потоку у польових котушках гоніометра. Тому пошукова котушка гоніометра буде розгорнута на додатковий кут, частково компенсуючи Р.
Механічний спосіб компенсації Р базується на додатковому повороті стрілки покажчика ККР відносно рамочної антени або шукача гоніометру. Механічний компенсатор Р уявляє собою запам’ятовуючий пристрій, у який введено графік Р в полярній системі координат.
2.2.2. Автоматичний радіокомпас регіонального літака
Автоматичний радіокомпас АРК-25 (регіонального літака Ан-148) призначений для літаководіння по радіосигналах привідних і широкомовних радіостанцій (далі – ПРС) за рахунок безперервного автоматичного визначення їх курсового кута ККР.
АРК забезпечує:
-виконання польоту по маршруту по радіосигналах ПРС;
-визначення місцезнаходження літака шляхом пеленгації кількох ПРС;
-виконання спільно з іншою апаратурою заходу на посадку;
-пізнання аеродромів і проміжних пунктів маршруту (ППМ) шляхом прослухування позивних сигналів ПРС.
На літаку встановлено два комплекти радіокомпасів АРК № 1 та 2, функціонально зв’язаних з (рис. 2.15):
-системою керування загально-літаковим обладнанням (СКЗЛО);
-комплексною системою електронної індикації та сигналізації (КСЕІС);
-бортовою системою технічного обслуговування (БСТО);

-апаратурою внутрішнього зв’язку авіаційною (АВЗА);
-радіомагнітним індикатором (РМІ);
-обчислювальною системою літаководіння (ОСЛ) через багатофункціональний пуль керування (БФПК).
ОСЛ |
|
|
|
|
БФПК |
|
|
|
|
БСТО |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АРК-25 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
КСЕІС |
|
|
|
|
СКЗЛО |
|||||||
РМІ |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
№ 1 та 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АВЗА
Рис. 2.15. Схема функціональних зв’язків АРК літака Ан-148
СКЗЛО на підставі отриманої інформації і закладених програм функціонування реалізує формування команд видачі сигнальній інформації для КСЕІС і БСТО.
КСЕІС забезпечує:
-виведення значень ККР1 і ККР2 від АРК №1 та АРК № 2 на командно-пілотажний індикатор (КПІ);
-виведення застережливих повідомлень на комплексний індикатор літакових систем (КІЛС) і багатофункціональний індикатор (БФІ), а також статусних повідомлень на БФІ;
-виведення рекомендацій по усуненню застережливих повідомлень на КІЛС і БФІ;
-видачу в АВЗА звукового супроводу текстових повідомлень;
-видачу в СКЗЛО ознак відмов.
БСТО на підставі отриманої інформації і закладених програм функціонування реалізує:
-порівняння інформації про відмови, що виводяться екіпажу, з даними БСТО;
-запам’ятовування інформації про відмови в поточному і попередньому польотах;
-формування повідомлень про поточні відмови, для виводу на екрани БФПК ОСЛ;

- видачу в апаратуру організації зв’язку у польоті інформації про відмови для передачі її на землю.
РМІ відображає ККР1 і ККР2 від АРК №1 та АРК № 2.
ОСЛ за заздалегідь введеною програмою польоту автоматично проводить налаштування кожного АРК на частоти ПРС і вибір режиму роботи. Також є можливість ручного налаштування АРК за допомогою БФПК ОСЛ.
АВЗА отримує від радіокомпасів позивний сигнал ПРС, а також сигнал звукового супроводу текстових повідомлень від КСЕІС.
АРК мають вбудовану система контролю, яка забезпечує безперервний контроль його працездатності і видачу результатів контролю в КСЕІС. Передбачена можливість перевірки радіокомпасів в режимі тест-контролю.
Установка блоків рамкових антен АРК на борту літака Ан-148 показана на рис. 2.16.
Рис. 2.16. Блоки рамкових антен АРК на борту літака Ан-148

Покажчики ККР 1 і ККР 2 та індикація РМІ представлена на рис.
2.17.
Рис. 2.17. Індикація РМІ
1 – перемикач «АРК-VOR» індикації ККР АРК №1; 2 – вузька стрілка індикації ККР1; 3 - прапорець відмови каналу ККР1;
4 – індикатор дальності «Д1» апаратури DME №1; 5 – індикатор дальності «Д2» апаратури DME №2;
6 – нульовий індекс шкали ККР і індекс відліку магнітного курсу; 7 – прапорець відмови каналу ККР2; 8 – широка стрілка індикації ККР2; 9 – нерухомий циферблат ККР;
10 – перемикач «АРК-VOR» індикації ККР АРК №2; 11 – рухливий циферблат магнітного курсу; 12 – прапорець відмови каналу магнітного курсу

Органи управління і контролю радіокомпасів представлені на рис. 2.18.
Рис. 2.18. Органи управління і контролю АРК літака Ан-148
Інформація, що виводиться на КПІ від АРК, представлено на рис. 2.19.