

Зміст
Вступ
1. Аналіз методів вимірювання навігаційних параметрів
Методи та алгоритми оцінювання навігаційних параметрів
Метод вимірювання визначеного навігаційного параметру
Висновок
2. Реалізація методу вимірювання навігаційного параметру для створення певного радіонавігаційного параметру
2.1 Структурна схема
2.3 Висновок
Висновок
Література
Вступ
Термін «навігація» традиційно не застосовується до водіння об'єктів, траєкторії руху яких заздалегідь жорстко визначені і положення яких в будь-який момент часу відомо, наприклад залізничних складів. Основою успішного літаководіння є комплексне застосування технічних засобів, яке полягає в тому, що літаководіння здійснюється за допомогою не одного якого-небудь засобу, а декількох. При цьому результати навігаційних визначень, отримані за допомогою одних засобів, уточнюються за допомогою інших засобів. Таке дублювання виключає можливість допущення грубих помилок, підвищує точність і надійність літаководіння. Для правильного вирішення питань комплексного застосування технічних засобів літаководіння необхідне знання принципів роботи тих чи інших засобів, їх можливостей і способів використання для вирішення різних навігаційних завдань. Авіаційна техніка й технічні засоби літаководіння безперервно розвиваються. Сучасні літаки оснащуються автоматизованими навігаційними комплексами, значно підвищують точність, надійність і безпека літаководіння.
Основою успішного літаководіння є комплексне застосування технічних засобів, яке полягає в тому, що літаководіння здійснюється за допомогою не одного якого-небудь засобу, а декількох. При цьому результати навігаційних визначень, отримані за допомогою одних засобів, уточнюються за допомогою інших засобів. Таке дублювання виключає можливість допущення грубих помилок, підвищує точність і надійність літаководіння. Для правильного вирішення питань комплексного застосування технічних засобів літаководіння необхідне знання принципів роботи тих чи інших засобів, їх можливостей і способів використання для вирішення різних навігаційних завдань. Авіаційна техніка й технічні засоби літаководіння безперервно розвиваються. Сучасні літаки оснащуються автоматизованими навігаційними комплексами, значно підвищують точність, надійність і безпека літаководіння.
Широке застосування отримують системи для автоматичного літаководіння по маршруту і для автоматичного заходу на посадку Для експлуатації радіонавігаційного обладнання сучасних літаків і літаків найближчого майбутнього потрібні висококваліфіковані інженери, глибоко знають теорію і досконало володіють практикою радіонавігації.
Аналіз методів вимірювання навігаційних параметрів
Методи та алгоритми оцінювання навігаційних параматрів
Точкове оцінювання
Точкові оцінки являють собою числа,
отримані шляхом підстановки значень
вибірки
 у формулу для оцінюваного параметру.
Математичне сподіванняmxта дисперсію
у формулу для оцінюваного параметру.
Математичне сподіванняmxта дисперсію оцінюють
за допомогою співвідношень:
оцінюють
за допомогою співвідношень:


Оцінки, отримані в результаті статистичної обробки вибіркових даних, повинні задовільняти наступним вимогам:
Оцінка повинна бути незміщеною, тобто математичне сподівання її повинно дорівнювати параметру, який визначається,
 ,
де
,
де -оцінка
параметру g .
-оцінка
параметру g .Оцінка повинна бути ефективною, тобто мінімізувати значення середньоквадратичної похибки оцінки,
 ,
де g1– оцінка, яка розглядається,
gi
- довільна інша оцінка.
,
де g1– оцінка, яка розглядається,
gi
- довільна інша оцінка.Оцінка повинна бути суттєвою, тобто при збільшенні кількості випробувань Nзначення оцінки повинно бути збіжним до значення оцінюваного параметру
 .
.
Наведені оцінки математичного сподівання
та дисперсії є суттєвими та незміщеними,
а для вибірки з нормальної сукупності
 являє собою ефективну оцінку, а
являє собою ефективну оцінку, а прямує
до ефективної при
прямує
до ефективної при ,
тобто є асимптотично ефективною.
,
тобто є асимптотично ефективною.
Незміщеність оцінки
 досягається
використанням в знаменнику формули
(2.2) величиниn=N-1, яка називається
числом степенів вільності і обчислюється
як різниця між числом наявних
експериментальних значеньNта
кількістю додаткових параметрів, які
входять у формулу для оцінки дисперсії
і обчислюються як лінійні комбінації
тих самих спостережень (параметр
досягається
використанням в знаменнику формули
(2.2) величиниn=N-1, яка називається
числом степенів вільності і обчислюється
як різниця між числом наявних
експериментальних значеньNта
кількістю додаткових параметрів, які
входять у формулу для оцінки дисперсії
і обчислюються як лінійні комбінації
тих самих спостережень (параметр ).
).
Інтервальне оцінювання
Точкові оцінки параметрів
не дозволяють оцінити, наскільки близька
оцінка
 до
відповідного значення теоретичного
параметруg.
Більш інформативний спосіб полягає в
побудові інтервалу, в якому з заданою
достовірністю виявиться оцінюваний
параметр, тобто в визначенні інтервальної
оцінки параметру g.
до
відповідного значення теоретичного
параметруg.
Більш інформативний спосіб полягає в
побудові інтервалу, в якому з заданою
достовірністю виявиться оцінюваний
параметр, тобто в визначенні інтервальної
оцінки параметру g.
Інтервальною оцінкою параметру
g називається інтервал,
межі якого l1
та l2 являють
собою функції значень вибірки
 і
який з заданою ймовірністюР
накриває оцінюваний параметр:
і
який з заданою ймовірністюР
накриває оцінюваний параметр:
![]()
Інтервал
 називається
довірчим, а його межіl1
та l2 -
випадкові величини – нижня та верхня
довірчі межі відповідно. Р
називається довірчою ймовірністю, а
величина α=1-P-рівнем значимості,
який використовується при побудові
довірчого інтервалу. Таким чином
інтервальна оцінка характеризується
шириною довірчого інтервалуL=l2-l1та довірчою ймовірністюР,яка
характеризує степінь надійності
результатів.
називається
довірчим, а його межіl1
та l2 -
випадкові величини – нижня та верхня
довірчі межі відповідно. Р
називається довірчою ймовірністю, а
величина α=1-P-рівнем значимості,
який використовується при побудові
довірчого інтервалу. Таким чином
інтервальна оцінка характеризується
шириною довірчого інтервалуL=l2-l1та довірчою ймовірністюР,яка
характеризує степінь надійності
результатів.
Процедура отримання інтервальної оцінки полягає в наступному:
Записуємо певне ймовірнісне твердження виду
де
 – функція густини ймовірності випадкової
величиниy. При цьому значенняd1
таd2
визначаються
за допомогою додаткових умов:
– функція густини ймовірності випадкової
величиниy. При цьому значенняd1
таd2
визначаються
за допомогою додаткових умов:
![]()
Аргумент виразу (2.4) перетворюють
таким чином, щоби в результаті параметр,
який оцінюється, виявився між величинами,
визначеними за вибіркою. Це й будуть
межі довірчого інтервалу (l1,l2). Функція обирається таким чином, щоб вона дозволяла
подібне перетворення та мала відому
(краще табульовану) функцію густини
ймовірностіf(y), що суттєво
полегшує визначенняd1 таd2.
обирається таким чином, щоб вона дозволяла
подібне перетворення та мала відому
(краще табульовану) функцію густини
ймовірностіf(y), що суттєво
полегшує визначенняd1 таd2.
Приклад 1.Побудуємо інтервальну
оцінку математичного сподіваннятxнормальної генеральної сукупності з
відомою дисперсією .
Нормуючи цю сукупність, отримаємо
функцію
.
Нормуючи цю сукупність, отримаємо
функцію ,
яка має нормальний розподіл з математичним
сподіванням 0 та дисперсією 1. Співвідношення
(2.4) з врахуванням (2.5) прийме вигляд
,
яка має нормальний розподіл з математичним
сподіванням 0 та дисперсією 1. Співвідношення
(2.4) з врахуванням (2.5) прийме вигляд

Після перетворення аргументу отримаємо![]()
![]()
І ширина довірчого інтервалу складає
![]()
Метод вимірювання визначеного навігаційного параметру
Радіомаячна система посадки є складним комплексом бортового та наземного обладнання, яке призначене безпосередньо для забезпечення процесу заходу повітряного судна на посадку, одержання на борту ПС і видача екіпажу інформації про кутове відхилення ПС від лінії курсу (ЛК) заходу на посадку та про дальність до розрахункової точки приземлення.
Склад РМСП: наземне й бортове обладнання.
Наземне обладнання РМС призначене для створення зон випромінювання сигналів, інформативні параметри яких залежать від відхилення точки приймання від ЛК як у горизонтальній, так й у вертикальній площинах, а також для випромінювання сигналів, що забезпечують визначення відстані до розрахункової точки приземлення ПС або що відзначають певні ділянки на ЛК. До складу наземного обладнання РМС входять:
Курсовий радіомаяк (КРМ)
Глісадний радіомаяк (ГРМ)
Маркерний радіомаяк (МРМ)
Далекомірний радіомаяк (ДРМ) – у складі сучасних модифікацій
Типи й розміщення радіомаяків залежать від функцій системи посадки, до складу якої вони входять.
Бортове обладнання РМС призначене для приймання, посилення та перетворення сигналів наземних радіомаяків і видачі на індикатори пілотів сигналів, що відповідають кутовим відхиленням ПС від ЛК, а також відстані до розрахункової точки приземлення або прольоту характерних ділянок ЛК. Залежно від довжини хвилі РМСП діляться на системи метрового ( англ. ILS (instrument landing system)) і сантиметрового діапазонів (англ. MLS, (microwave landing system)
Припустимий при посадці мінімум погоди визначається встановленими ICAO нормами. Відповідно до метеоумов при посадці розрізняють РМС I, II і III категорій. Найбільш широке застосування знаходять РМС I і II категорій. Більш вартісна та складна в експлуатації апаратура системи III категорії, яка використовується у великих аеропортах з високою інтенсивністю повітряного руху та підвищеною ймовірністю несприятливих метеоумов.
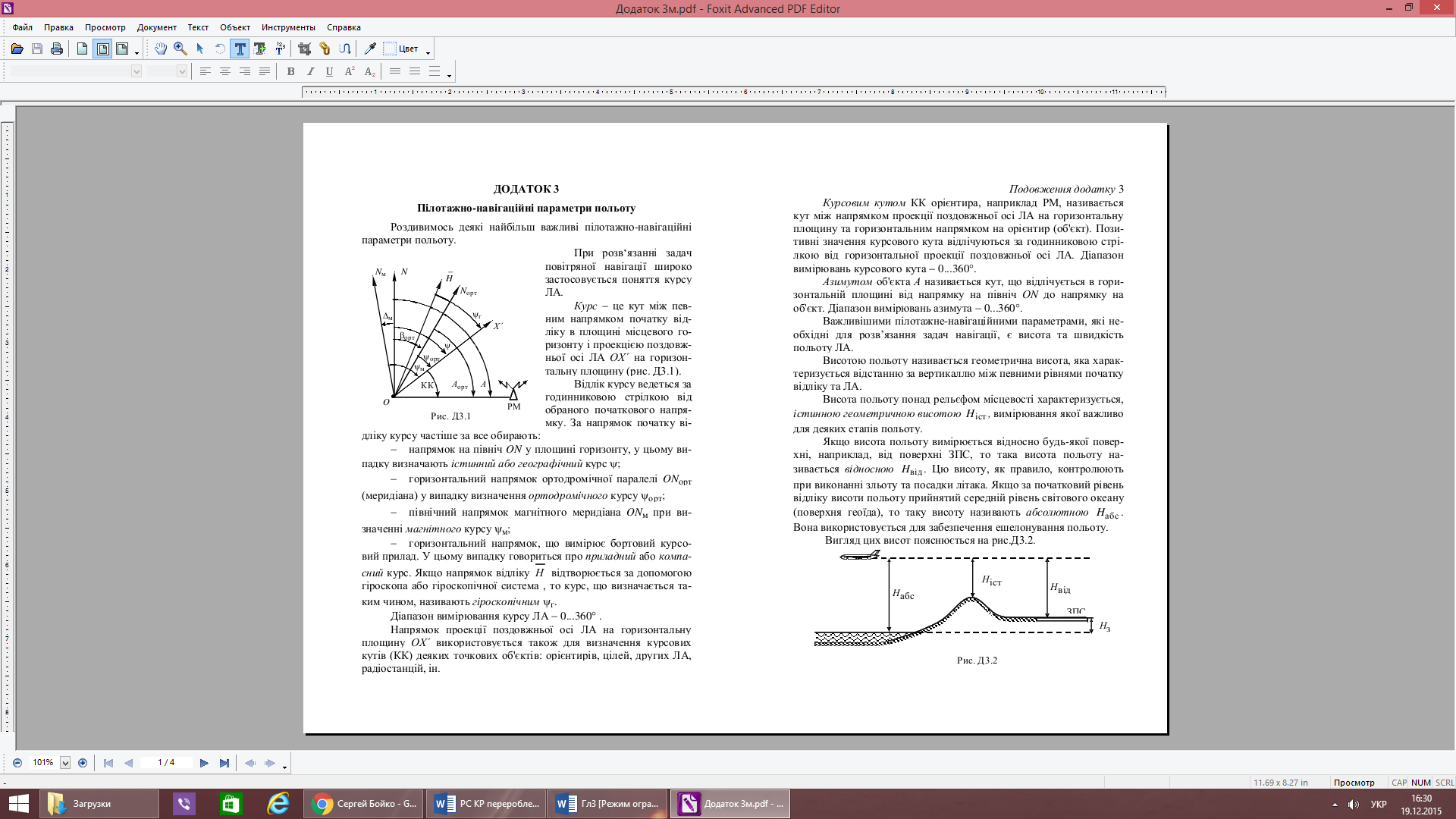
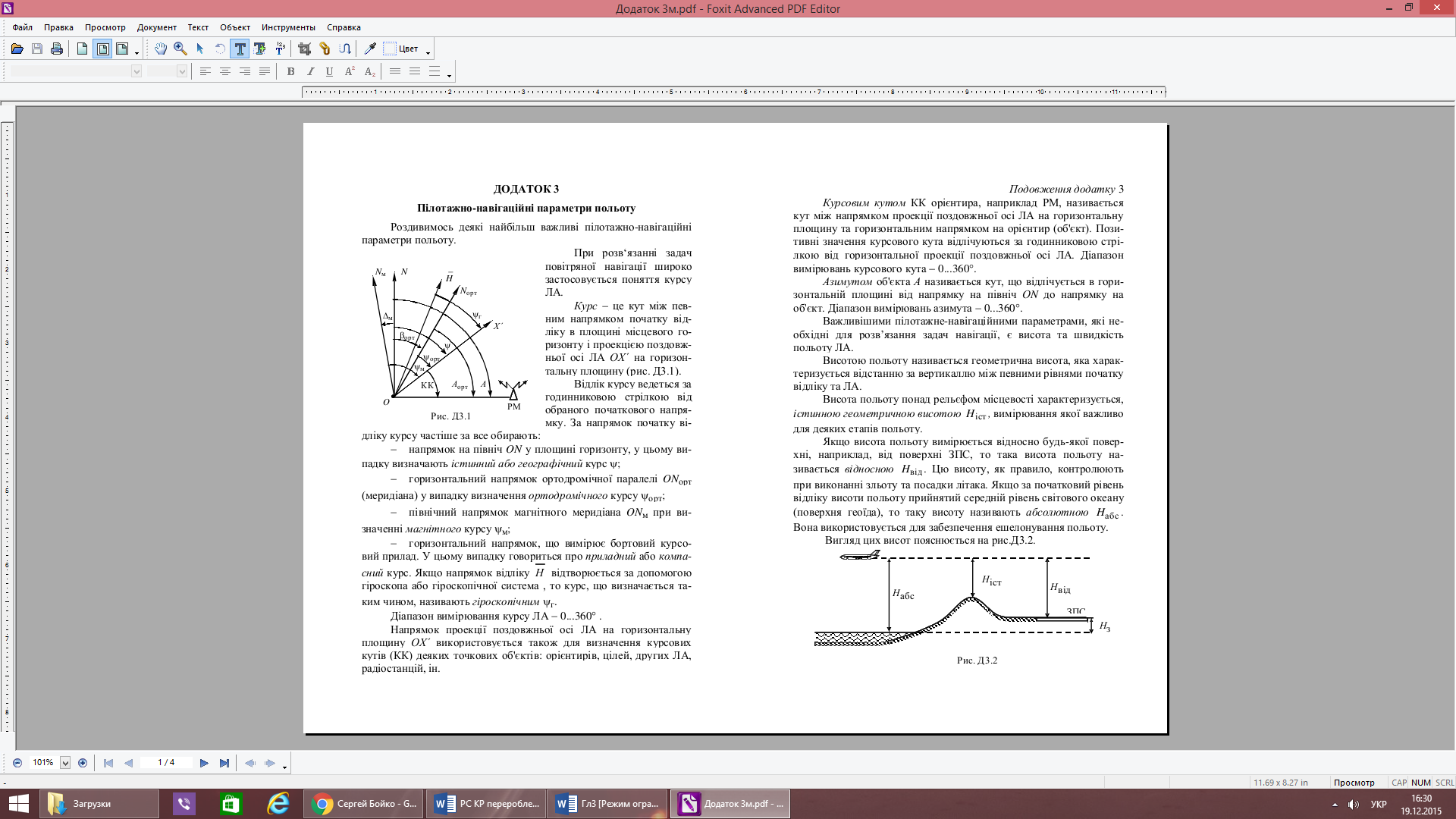
Принцип роботи РМС метрового діапазону грунтується на визначенні кутового відхилення ПС від заданої траєкторії у горизонтальній і вертикальній площинах за сигналами наземних радіомаяків (рис. 1).
Антенні системи цих радіомаяків формують у просторі амплітудномодульоване поле, коефіцієнти глибини модуляції якого залежать від φ або θ (просторова амплітудна модуляція). Інформативний параметр сигналу в РМСП метрового діапазону - різниця глибин модуляції (РГМ) напругами з частотами 90 і 150 Гц або глибина просторової модуляції напругою з частотою 60 Гц. Різниця глибин модуляції застосовується як інформативний параметр у каналі глісади всіх РМСП метрового діапазону й у каналі курсу РМСП, стандартизованих ICAO (системи типу ILS). Глибина модуляції використовується як інформативний параметр сигналу тільки в каналі курсу РМС типу СП-50М і СП-68, що є підставою для виділення цих систем в окрему групу (системи типу СП-50).
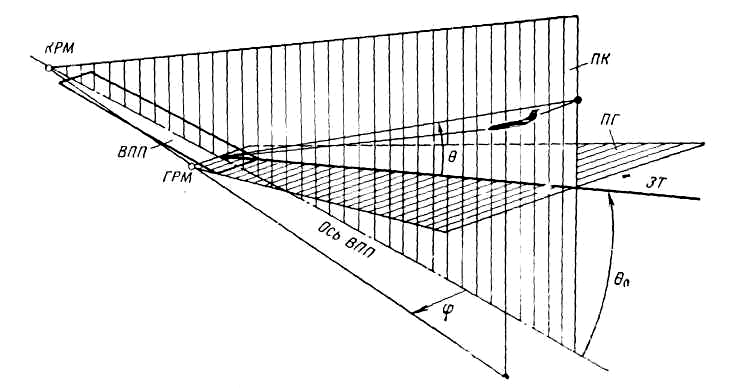
Рис. 1. Кутове положення ПС при заході на посадку по РМСП метрового діапазону: КРМ, ГРМ - курсовий і глісадний радіомаяки; ПК, ПГ - площини курсу й глісади.
Проліт ПС характерних ділянок на ЛК визначається за сигналами маркерного радіомаяка, антенна система якого формує спрямовану нагору діаграму. Інформативний параметр сигналу в маркерному каналі являє собою амплітуду сигналу, а також код маніпуляції і частоту його модуляції (використовувані для впізнавання радіомаяка).
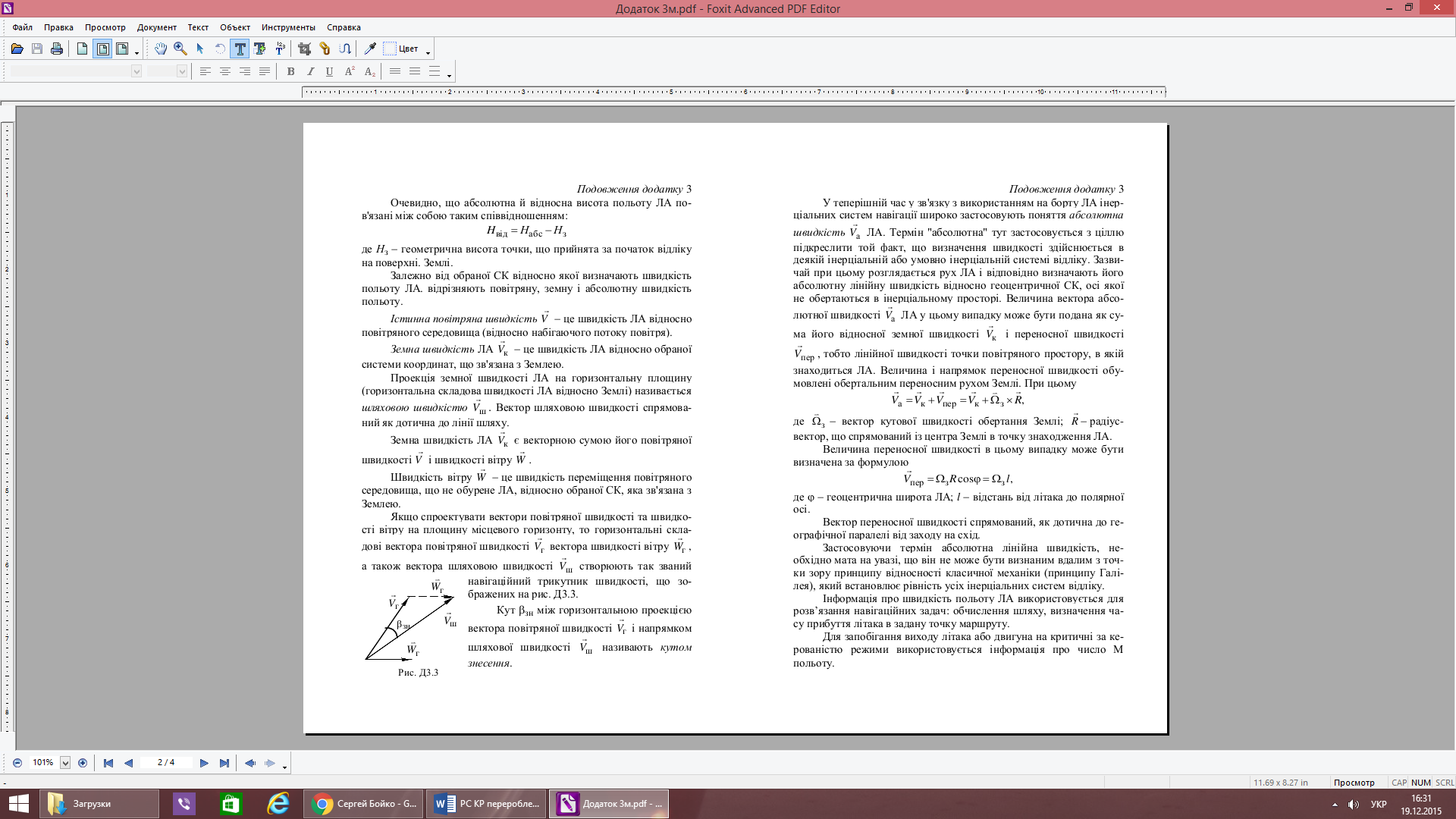
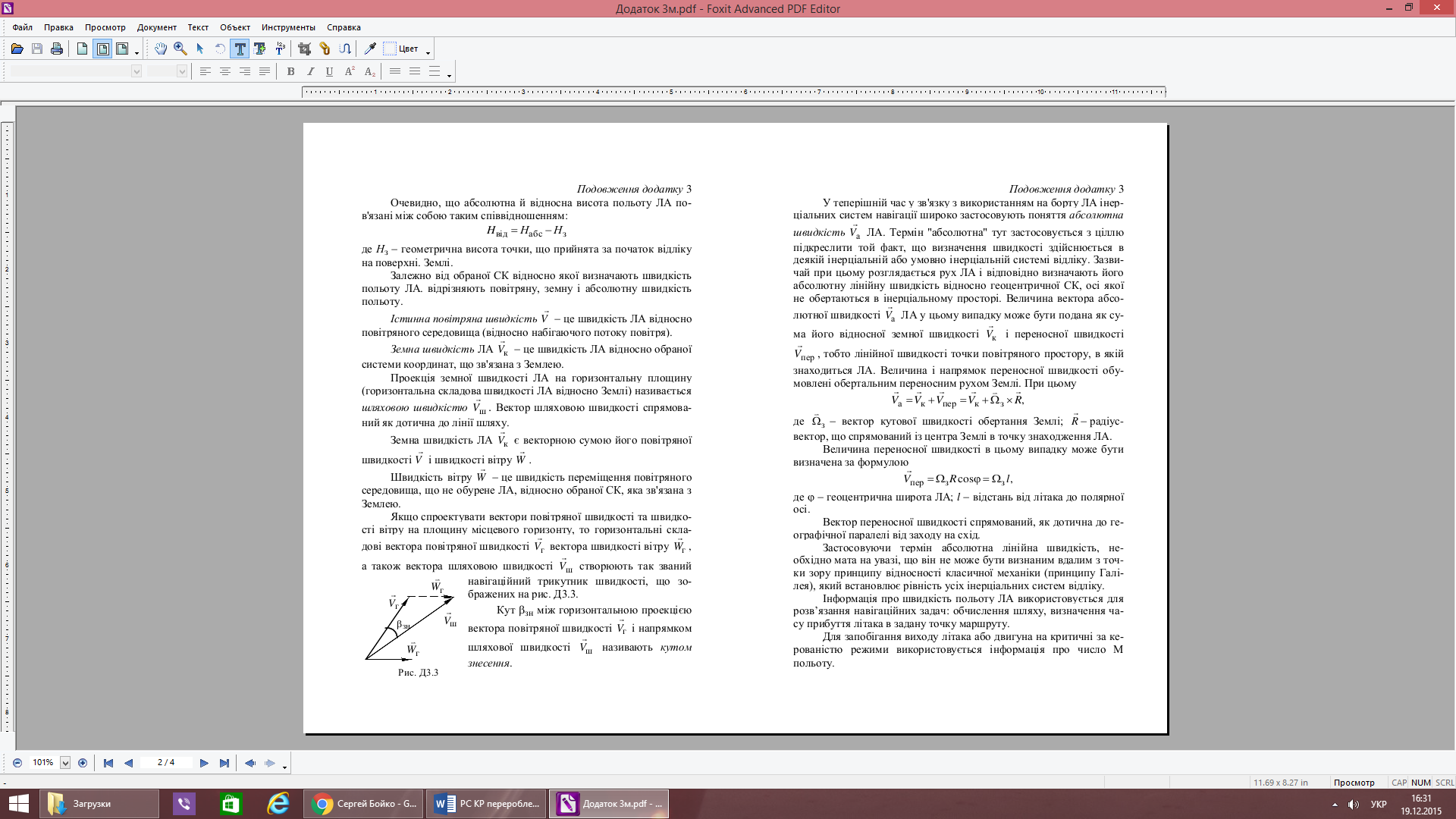
Відповідно до функціонального призначення в РМСП метрового діапазону входять три канали (рис. 2): курса, глісади і маркерний, кожен з яких містить відповідний радіомаяк і бортовий радіоприймач із індикаторним приладом - покажчиком курсу та глісади зі звуковими та світловими індикаторами коду МРМ.
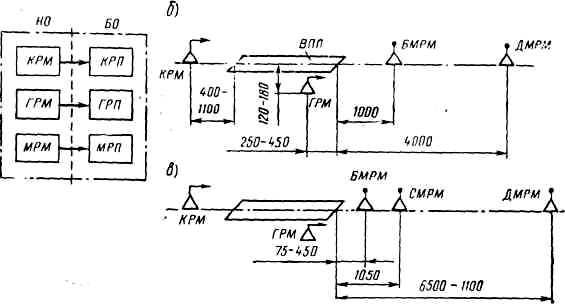
Рис. 2. Склад(а) і розміщення радіомаяків РМС типу ILS
при двомаркерній (6) і тримаркерній (в) комплектаціях (відстані зазначені в метрах)