

4)Демодуляция в цифровых системах спрс
4.1) Когерентный, некогерентный прием сигнала.
Демодуляции тесно связана с модуляцией, применяемой в системе подвижной связи.
Прием сигнала может быть когерентным (синхронным) илинекогерентным(асинхронным). Когерентный прием предусматривает наличие информации о начале и конце периода модуляции (временной синхронизации) и о частоте и фазе несущей (синхронизация по несущей).
В когерентном приемнике используется вся информация о принимаемом сигнале.
4.2) Схема оптимального синхронного приемника сигналов qpsk.
На рис. 1.32 изображен синхронный QPSK-приемник (предположим, что фильтры в синфазной и квадратурной ветвях идентичны, т.е.p(t) = q(t).
|
|
|
Рис. 1.32. Схема оптимального синхронного приемника сигналов QPSK
|

Принимаемый сигнал (обычно уже перенесенный на промежуточную частоту) направляется на входы двух синхронных демодуляторов, состоящих из смесителей и фильтров нижних частот.
Фильтры являются частью синхронного демодулятора (они обрезают спектральные компоненты в районе удвоенной несущей частоты) и они согласованы с передающими фильтрами.
В случае передачи сигнала по неискажающему каналу с аддитивным белым гауссовым шумом импульсная характеристика приемного фильтра является зеркальным отражением характеристики передающего фильтра. Возможен случай фильтров с симметричной формой спектра, описываемой, например, формулой (1.34). Тогда импульсная характеристика приемных и передающих фильтров будет идентичной.
Изображенный на рис. 1.32 блок восстановления несущей и фазы использует разницу между символьными решениями, генерируемыми решающим устройством в синфазной и квадратурной ветвях, и сигналами, подаваемыми на вход решающего устройства. Эта ошибка служит мерой фазовой разности между принятым и опорным сигналами, а скорость изменения ее значения является функцией разности частот между обоими сигналами.
Существуют другие схемы восстановления несущей, например, основанные на нелинейной обработке принятого сигнала – искусственного формирования спектральной линии, эквивалентной несущей частоте.
Разность между входным и выходным сигналами решающего устройства также часто используется для коррекции в цепи восстановления синхронизации.
Вносимые типичным каналом передачи данных искажения, такие, как плоские и селективные замирания, замирание вследствие многолучевого распространения, межсимвольная интерференция и дрожание фазы – предполагают применение настолько сложных схем синхронных приемников, что их не всегда возможно реализовать. Это происходит в тех случаях, когда свойства канала меняются настолько быстро, что цепь восстановления несущей не успевает отслеживать изменения и генерирует оценки несущей частоты и фазы с недостаточным качеством. Решение этой проблемы – применение соответствующего типа модуляции с некогерентным приемом:
- некогерентный прием дифференциальной квадратичной фазовой манипуляции (англ.Differential Quaternary Phase Shift Keying –DQPSK);
-прием сигналов, модулированных частотной манипуляцией
DQPSK-модулированный сигнал описывается формулой (1.25), в которой синфазная и квадратурная модулирующие компоненты задаются выражениями
|
|
(1.35) |

2-битный информационный блок представляется не символами dIn и dQn и не их аргументом φn= (dIn +jdQn), а фазовой разностью между двумя последовательными периодами модуляции Δφn= φn- φn-1.
Схема такого приемника изображена на рис. 1.33.
|
|
|
Рис. 1.33. Некогерентный приемник DQPSK-сигналов |
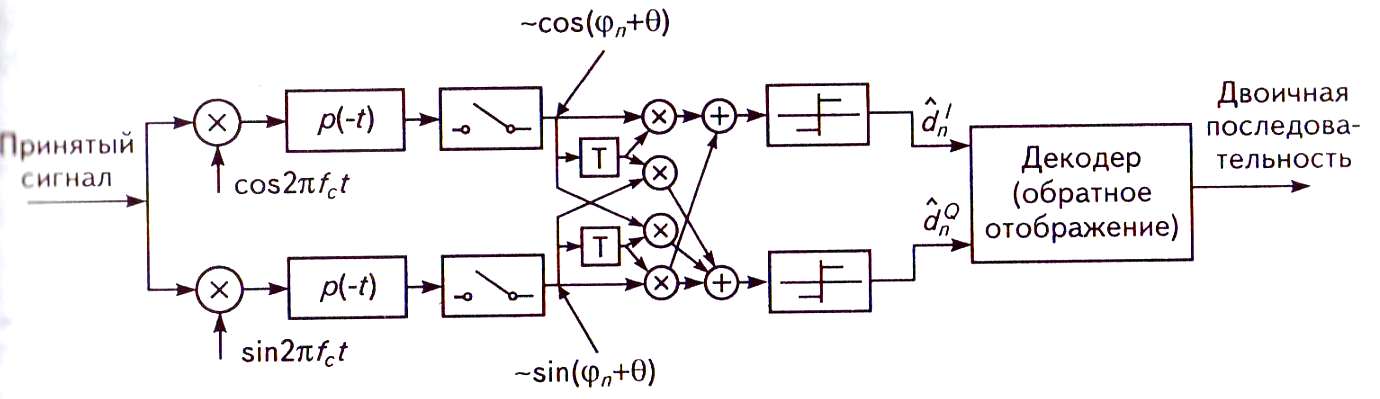
Отсчеты с выходов синфазной и квадратурной цепей снимаются единожды на каждый символ данных и пропорциональны, соответственно, косинусу и синусу угла φn+ θ. Здесь θ характеризует разность между фазой несущей частоты принятого сигнала и фазой опорного несущего сигнала, используемого в демодуляторе. Синус и косинус угла φn-1 + θ, полученного в предыдущий период, хранятся в ячейках памяти, так что приемник может использовать отсчеты и текущего, и предыдущего периодов модуляции.
В DQPSK-модуляции достаточно знать, в каком квадранте синфазно-квадратурной плоскости находится угол Δφn . Для этого достаточно выяснить знак функцийsinΔφn. иcosΔφn из известных тригонометрических соотношений
|
cosΔφn=cos((φn+θ) - ( φn-1 + θ)) = = cos(φn+θ)cos(φn-1 + θ) +sin(φn+θ)sin( φn-1 + θ), |
(1.36) |
|
sinΔφn=sin((φn+θ)-( φn-1 + θ)) = sin((φn+θ)cos(φn-1 + θ) +cos(φn+θ)sin( φn-1 + θ), |
(1.37) |
Набор умножителей и сумматоров, изображенных на рис. 1.33, реализует формулы (1.36) и (1.37). Приемник хорошо функционирует при допущении, что угол θ слабо меняется между периодами модуляции, т.е. дрожание фазы в периоде модуляции незначительно.